五自由度串并聯(lián)機(jī)構(gòu)的運(yùn)動學(xué)分析*
2016-11-11 02:41:52肖飛,傘紅軍,趙俊杰等
新技術(shù)新工藝 2016年8期
關(guān)鍵詞:分析
?
五自由度串并聯(lián)機(jī)構(gòu)的運(yùn)動學(xué)分析*
提出了一種五自由度串并聯(lián)機(jī)構(gòu),并對其作了正反解分析。利用桿長不變,采用矢量幾何方法,求得了機(jī)構(gòu)的位置反解。基于反解方程,利用數(shù)值迭代的方法,求機(jī)構(gòu)并聯(lián)部分的位置正解,再利用幾何投影的辦法,進(jìn)一步求出了機(jī)構(gòu)串聯(lián)部分的位置正解,并通過實(shí)例對所推導(dǎo)出的正反解算法進(jìn)行了驗(yàn)證,證明其是正確有效的。
串并聯(lián)機(jī)構(gòu);位置正反解;數(shù)值迭代
機(jī)構(gòu)運(yùn)動位置分析包括位置反解和位置正解,是受力分析、誤差分析、工作空間分析和運(yùn)動控制的基礎(chǔ)。串并聯(lián)機(jī)構(gòu)運(yùn)動學(xué)正反解分析包括串聯(lián)部分正反解和并聯(lián)部分正反解。其中,并聯(lián)部分比串聯(lián)部分較為容易求解,而并聯(lián)部分反解比正解更容易求解。
目前,求解位置正解主要有數(shù)值解法和封閉解法[1]。高建設(shè)等[2]以能耗最小姿態(tài)為最優(yōu)姿態(tài),基于矢量法求解了該串并混聯(lián)腿的運(yùn)動學(xué)正解和反解。韓方元等[3]提出了一種求解3-PRS并聯(lián)機(jī)構(gòu)正解的快速數(shù)值解法,使得計(jì)算速度比普通算法快1.5倍。畢樹生等[4]提出了一種新穎的用于微動操作的串并聯(lián)機(jī)構(gòu),利用矢量運(yùn)算的方法分析了機(jī)構(gòu)的位置正反解。劉晶晶等[5]設(shè)計(jì)了一種串并混聯(lián)7-DOF仿人機(jī)械臂,并通過對并聯(lián)機(jī)構(gòu)進(jìn)行運(yùn)動學(xué)分析和D-H建模,建立了仿人機(jī)械臂正運(yùn)動學(xué)的數(shù)學(xué)模型。蔣俊香[6]提出了新一代串并聯(lián)機(jī)床LINKS-EXE700,并對其反解作了詳細(xì)的介紹,先利用姿態(tài)矩陣求解串聯(lián)部分的反解,然后利用桿長不變建立約束方程,求解并聯(lián)部分的反解。紀(jì)校娟[7]對Tripod機(jī)構(gòu)進(jìn)行了運(yùn)動學(xué)分析,采用簡潔的數(shù)值搜索方法進(jìn)行求解,省去了方程求解的繁瑣過程。
本文對五自由度串并聯(lián)機(jī)構(gòu)分別進(jìn)行串聯(lián)部分和并聯(lián)部分的正反解位置分析,并通過MATLAB軟件進(jìn)行正反解驗(yàn)算,證明了算法的科學(xué)性和可靠性。
1 五自由度串并聯(lián)機(jī)構(gòu)的機(jī)構(gòu)描述
五自由度串并聯(lián)機(jī)構(gòu)(見圖1)是由并聯(lián)部分和串聯(lián)部分構(gòu)成混聯(lián)機(jī)構(gòu),并聯(lián)部分由定平臺、動平臺和3個分支組成。3個分支是一個平行四邊形長桿,一端與滑塊導(dǎo)軌連接,另一端與動平臺連接,這樣就保證了動平臺始終與定平臺平行,滑塊由電動機(jī)帶動絲杠傳動,兩自由度串聯(lián)機(jī)構(gòu)由2個轉(zhuǎn)動副構(gòu)成。機(jī)構(gòu)簡圖如圖2所示。
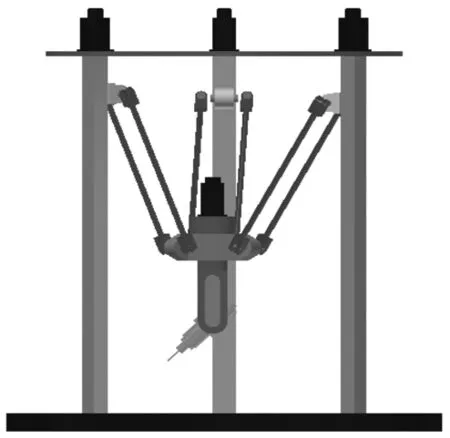
圖1 五自由度串并聯(lián)機(jī)構(gòu)
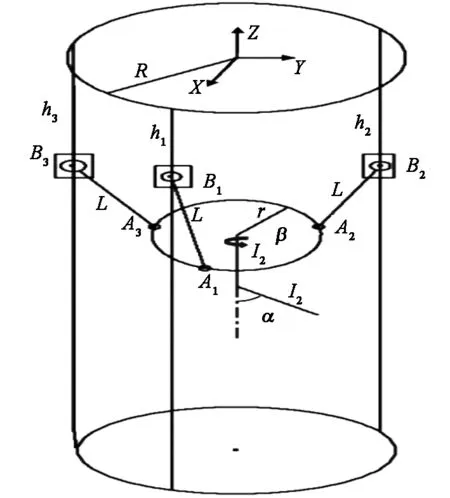
圖2 五自由度串并聯(lián)機(jī)構(gòu)的結(jié)構(gòu)簡圖
2 五自由度串并聯(lián)機(jī)構(gòu)的正反解研究
2.1 五自由度串并聯(lián)機(jī)構(gòu)的反解
2.1.1 串聯(lián)部分的反解
已知刀具的位置和姿態(tài),求解動平臺中心的位置和串聯(lián)部分的轉(zhuǎn)角,這個過程稱為串聯(lián)部分的反解。串聯(lián)部分機(jī)構(gòu)圖如圖3所示,其包含2個轉(zhuǎn)動副。刀具運(yùn)動到空間某一位姿的狀態(tài)示意圖如圖4所示。在刀頭點(diǎn)建立坐標(biāo)系O2X2Y2Z2,旋轉(zhuǎn)副1的長度為l1,旋轉(zhuǎn)副2(含刀具)的長度為l2,此時刀具轉(zhuǎn)動副R1和R2均有轉(zhuǎn)動角度。
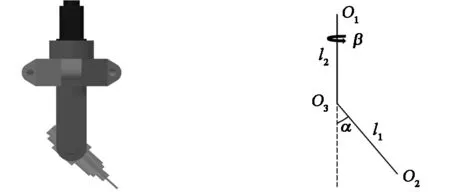
圖3 串聯(lián)部分機(jī)構(gòu)圖 圖4 串聯(lián)部分狀態(tài)示意圖

(1)
(2)
(3)
串聯(lián)部分轉(zhuǎn)動副轉(zhuǎn)角求解過程如下:
(4)
(5)
2.1.2 并聯(lián)部分的反解
利用串聯(lián)部分求取的動平臺的位置,求并聯(lián)部分3個滑塊的位置,是并聯(lián)部分的反解。利用坐標(biāo)變換,可以計(jì)算出動平臺各鉸點(diǎn)在定系中的坐標(biāo)(B1,B2,B3),然后根據(jù)桿長不變,得出定平臺各個鉸點(diǎn)的坐標(biāo),最后求出3個滑塊的位移(h1,h2,h3)。


(6)
將機(jī)構(gòu)的結(jié)構(gòu)參數(shù)和動平臺的位置參數(shù)帶入式6,分別計(jì)算出h1,h2,h3。
由:L2=(R-xO1-r)2+(yO1)2+(h1-zO1)2

(7)
由:
則:
(8)
由:
則:
(9)
2.2 五自由度串并聯(lián)機(jī)構(gòu)的正解
機(jī)構(gòu)的位置正解方法是已知機(jī)構(gòu)的并聯(lián)部分滑塊的位置和串聯(lián)部分轉(zhuǎn)動副的轉(zhuǎn)角,求解刀具刀頭點(diǎn)的位置和姿態(tài)。利用微分求導(dǎo)法可以求出機(jī)構(gòu)并聯(lián)部分的雅可比矩陣,然后將反解方程等式兩側(cè)同時對時間t求一階偏導(dǎo),可得到:
(10)
對上式,令:
則J就是機(jī)構(gòu)并聯(lián)部分的輸入?yún)?shù)與輸出參數(shù)之間的3×3階雅可比矩陣。
2.2.1 并聯(lián)部分的正解
近年來,串并聯(lián)機(jī)構(gòu)已經(jīng)成為機(jī)器人技術(shù)研究的熱點(diǎn)。與單純的串聯(lián)機(jī)構(gòu)或并聯(lián)機(jī)構(gòu)相比較,串并聯(lián)機(jī)構(gòu)兼顧了并聯(lián)和串聯(lián)的優(yōu)勢,其既具有并聯(lián)機(jī)構(gòu)的剛度大、響應(yīng)快的優(yōu)勢,也擁有串聯(lián)機(jī)構(gòu)工作并聯(lián)部分的正解流程圖如圖5所示。
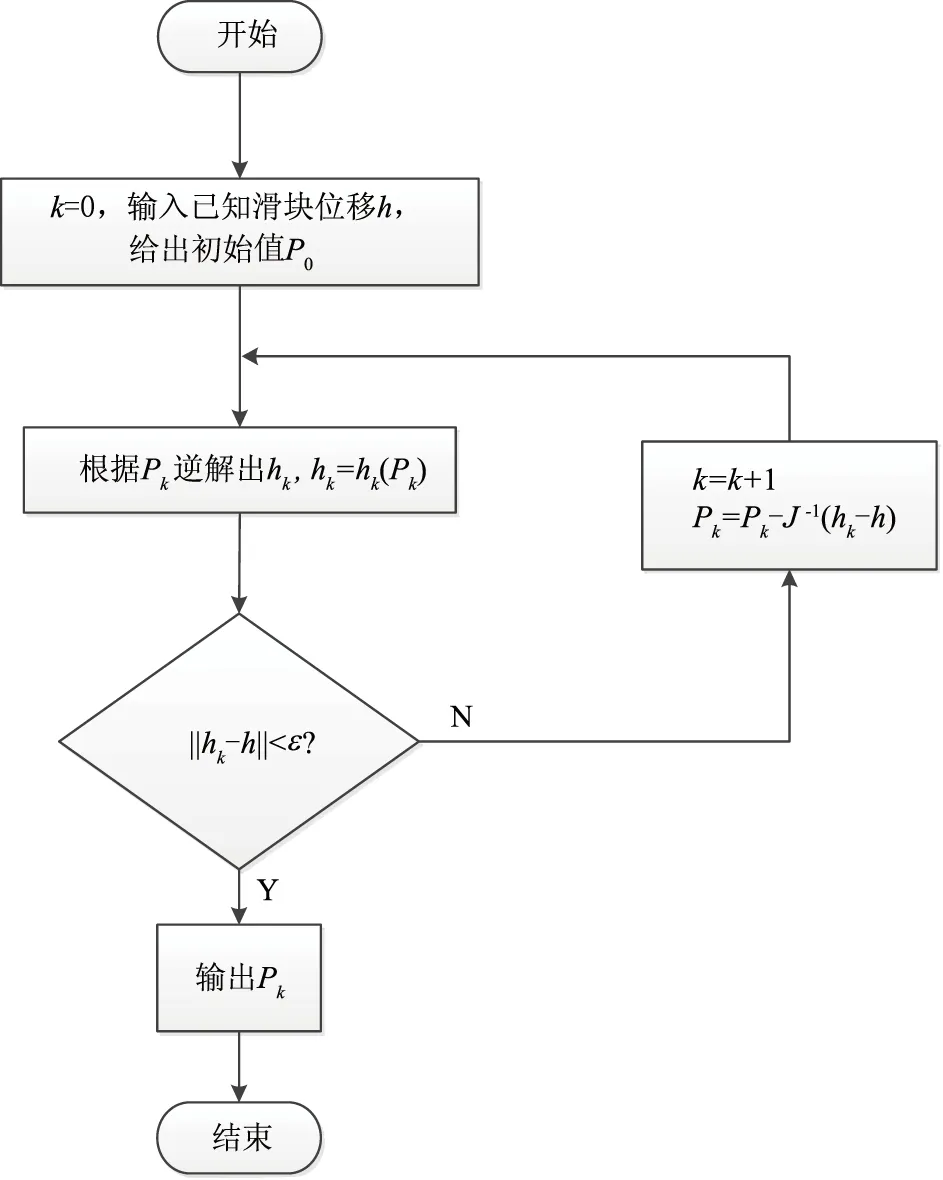
圖5 并聯(lián)部分的正解流程圖

2.2.2 串聯(lián)部分的正解
如圖6所示為刀具在XY平面內(nèi)的投影。通過幾何計(jì)算即可獲得刀具到頭點(diǎn)位置相對于動系原點(diǎn)O1的坐標(biāo)。
(11)
(12)
(13)
(14)
從而,可以計(jì)算出刀具到頭點(diǎn)C在定系中的位置坐標(biāo):
(15)
要求刀具的姿態(tài),可以先求出刀具軸線向量,然后再計(jì)算單位向量。
(16)
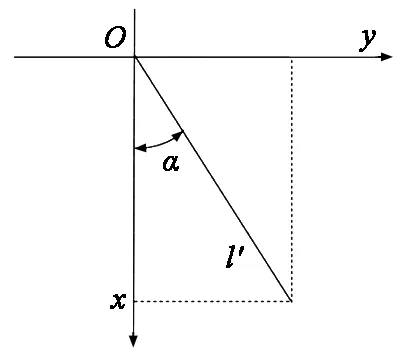
圖6 刀具在XY平面內(nèi)的投影
3 位置正反解算例
下述通過實(shí)例來驗(yàn)證上述正反解計(jì)算過程的正確性。設(shè)定機(jī)構(gòu)的結(jié)構(gòu)參數(shù)為:L= 750mm,R= 750mm,r=350mm,l1=300mm, l2=300mm。反解計(jì)算,給定輸入值,刀具在定坐標(biāo)系中的位姿參數(shù)為U0(27 100,-1 300,0.469 8,0.813 8,-0.342 0),利用MATLAB反解,得出3個滑塊的位置(h1, h2, h3)為:(-370.539 8,-336.629 0,-180.328 7),串聯(lián)部分轉(zhuǎn)動副轉(zhuǎn)角(α,β)為(30°,20°)。正解驗(yàn)證,將反解得出的結(jié)果帶入正解算法,得出刀具在定系中為位姿參數(shù)為U0(27 100,-1 300,0.469 8,0.813 8,-0.342 0)。經(jīng)比較,正好是刀具的已知位姿,由此正反解算法得到了相互驗(yàn)證。
4 結(jié)語
提出了一種五自由度串并聯(lián)機(jī)構(gòu),并對其作了正反解分析。并聯(lián)部分正解采用數(shù)值迭代進(jìn)行搜索計(jì)算,既保證了運(yùn)算速度,也使得計(jì)算準(zhǔn)確無誤;串聯(lián)部分反解采用空間向量的計(jì)算,方法簡便、快捷,并通過將反解結(jié)果作為正解條件,驗(yàn)證了正反解的正確性。
[1] 黃真,趙永生,趙鐵石.高等空間機(jī)構(gòu)學(xué)[M].北京:高等教育出版社,2006.
[2] 高建設(shè), 李明祥, 侯伯杰,等. 新型四足步行機(jī)器人串并混聯(lián)腿的運(yùn)動學(xué)分析[J]. 光學(xué)精密工程, 2015, 23(11):3147-3160.
[3] 韓方元,趙丁選,李天宇.3-RPS并聯(lián)機(jī)構(gòu)正解快速數(shù)值算法[J].農(nóng)業(yè)機(jī)械學(xué)報(bào), 2011, 42(4):229-233.
[4] 畢樹生, 王守杰, 宗光華. 串并聯(lián)微動機(jī)構(gòu)的運(yùn)動學(xué)分析[J]. 機(jī)器人, 1997(4):259-264.
[5] 劉晶晶, 彭俊泉, 劉新華. 基于MATLAB的串并混聯(lián)7-DOF仿人機(jī)械臂正運(yùn)動學(xué)分析及仿真[J]. 機(jī)械傳動, 2015(7):59-62,66.
[6] 蔣俊香. 新一代串并聯(lián)機(jī)床LINKS-EXE700工作機(jī)制分析[J]. 機(jī)床與液壓, 2013(19):70-72.
[7] 紀(jì)校娟.Tripod機(jī)構(gòu)的運(yùn)動學(xué)和靜力學(xué)分析[D]. 哈爾濱:哈爾濱工業(yè)大學(xué), 2008.
責(zé)任編輯 馬彤
肖 飛,傘紅軍,趙俊杰,雷俊松
(昆明理工大學(xué) 機(jī)電工程學(xué)院,云南 昆明 650500)
Kinematic Analysis of Five-DOF Parallel and Serial Mechanism
XIAO Fei, SAN Hongjun, ZHAO Junjie, LEI Junsong
(Faculty of Mechanical and Electrical Engineering, Kunming University of Science and Technology, Kunming 650500, China)
The five-DOF serial parallel mechanism is proposed and the forward and inverse solutions are analyzed. The analysis of the positive and negative solutions is made. The inverse solution of the mechanism is obtained by using the vector geometry method. Based on the inverse solution equation, using the numerical iterative method, the position of the parallel part of the mechanism is obtained, and then the geometric projection method is used to prove the position of the series part of the mechanism. Finally, the positive and negative solution algorithm is verified by an example, which proves that the algorithm is correct and effective.
serial-parallel mechanism, forward and inverse solutions of position, numerical iterative
yO1=yO2-l1py
zO1=zO2-l1pz+l2
L=‖A1-B1‖,L=‖A2-B2‖,L=‖A3-B3‖
h2=zO1+
h3=zO1+
l′=lsinβ
ax=l′cosα
ay=l′sinα
C=O1+O2
肖飛(1987-),男,碩士研究生,主要從事并聯(lián)機(jī)器人等方面的研究。
2016-04-13
* 湖南科技大學(xué)機(jī)械設(shè)備健康維護(hù)重點(diǎn)實(shí)驗(yàn)室開放基金項(xiàng)目(201403)
TP 242.2
A
猜你喜歡
現(xiàn)代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
當(dāng)代經(jīng)濟(jì)研究(2016年5期)2016-12-01 03:12:05
現(xiàn)代農(nóng)業(yè)(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
中國中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學(xué)學(xué)報(bào)(社會科學(xué)版)(2014年3期)2014-04-16 04:38:31
終身教育研究(2014年5期)2014-02-28 01:23:06
