激光焊接過程焊縫跟蹤傳感方法
2016-11-23 04:01:50許二娟高向東蕭振林陳曉輝
電焊機 2016年1期
許二娟,高向東,蕭振林,陳曉輝
激光焊接過程焊縫跟蹤傳感方法
許二娟1,高向東1,蕭振林2,陳曉輝2
(1.廣東工業大學機電工程學院,廣東廣州510006;2.廣州番禺高勛染整設備制造有限公司,廣東廣州511400)
激光焊接已經成為焊接制造業中最具發展前景的焊接技術。在激光焊接過程中必須依靠先進的焊縫跟蹤系統來保證焊縫和激光束的精確對中以獲得良好的焊件,傳感技術的應用為焊縫的實時跟蹤提供了最有利的解決方案。綜述了國內外最新結構光視覺傳感、紅外線傳感、同軸視覺檢測、磁光成像傳感檢測技術的原理及其優缺點,并給出應用實例加以說明。
激光焊接;焊縫跟蹤;焊縫檢測;傳感技術
0 前言
激光焊接因具有低變形、高質量、高精度、高效率、高速度、靈活性大及自動化程度高等諸多特點,已成為21世紀最受矚目且最具發展前景的焊接技術[1-5]。激光焊接以激光束作為被控對象實現焊接自動控制,激光束通常是由安裝在機器人末端的激光頭發出,工件被夾具固定在焊接平臺上,在焊接過程中要始終保持激光束和焊縫之間精確的相對位置關系。然而目前用于工業生產的焊接機器人主要是示教再現型機器人,其應變能力較差,對工件的裝配精度要求比較高[6-7]。在自動化焊接系統中,工件的定位誤差、加工誤差及裝配誤差等因素的變化會影響激光頭位置偏離,導致焊接質量下降甚至失敗[8]。加之焊接過程中的熱變形也會引起焊接位置或工件表面形狀發生變化,并且焊接過程中出現強烈的輻射、弧光、煙塵、飛濺等干擾,更增加了焊縫位置檢測的難度。隨著精密工件對焊接要求的提高,無坡口、緊密對接微間隙焊縫的焊接問題日益突出,加之激光焊接激光束功率密度高,光斑直徑小,焊接速度快,所允許的焊縫路徑偏差非常小,通常當激光束與焊縫之間的偏差大于0.2 mm時即可導致工件報廢[9]。在此情況下,更需要精確的焊縫跟蹤系統來實現實時焊縫位置自動檢測,移動并控制激光束使其始終與焊縫對中,所以先進的焊縫跟蹤傳感方法是保證焊接質量的關鍵,也是實現焊接過程自動化的重要研究方向[10-14]。
1 激光焊接概述
1.1激光焊接工作原理
激光焊接是利用受激輻射的原子原理,使用能量密度達1013W/cm2以上的激光脈沖對工件進行局部加熱,材料熔化后就會形成特定熔池從而達到焊接的目的[15-16]。當激光照射到工件材料表面時,小部分的激光能量被反射回來,大部分的激光能量被焊接材料吸收。整個焊接過程從微觀角度來看是量子作用的過程,從宏觀角度來看是材料對激光的吸收、反射,材料的熔化、氣化以及融化材料凝固的過程[17]。
1.2激光焊接分類
大功率激光焊接時,根據焊接過程中是否產生匙孔可分為熱傳導焊和深熔焊兩種模式,如圖1所示[18-20]。雖然這兩種模式都發生在激光焊接過程中,但二者卻具有完全不同的能量耦合機制、焊縫成形機理和焊縫效果,兩者的特點如表1所示。
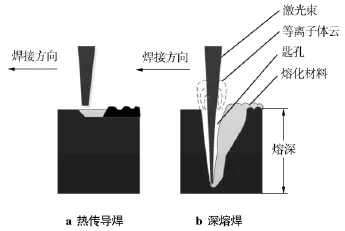
圖1 激光焊兩種模式的示意
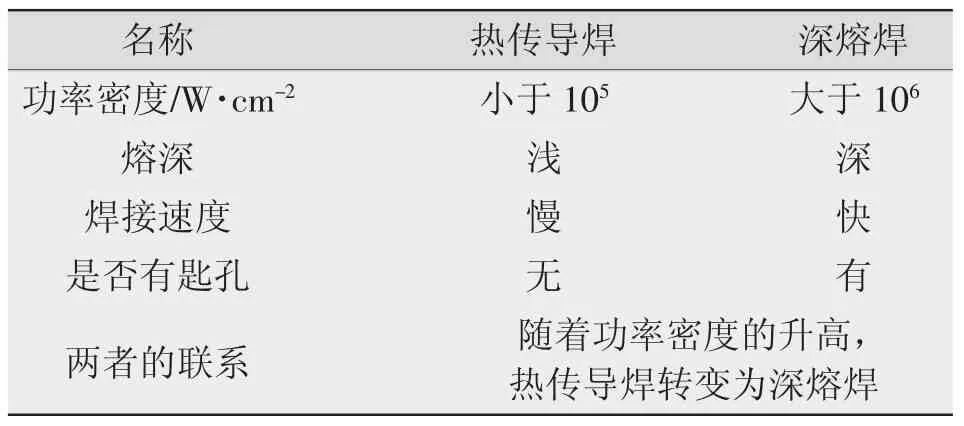
表1 熱傳導焊與深熔焊的對比[22]
(1)熱傳導焊:激光輻射加熱材料表面至熔點與沸點之間,使材料表面溫度逐漸升高并熔化,再將熱量通過熱傳導向材料內部擴散,使工件內部熔化,形成熔池,熔化的金屬最后冷卻結晶形成焊縫[21]。
(2)深熔焊:激光輻射迅速加熱材料表面至沸點,材料迅速熔化并氣化,金屬蒸汽離開熔池,熔池向下凹陷,經過反復作用形成匙孔。匙孔內充滿高溫蒸汽和等離子體,匙孔四周包圍著熔融材料。匙孔內蒸汽支撐著四周的液態熔融材料,最后匙孔外液體流動和匙孔內壁表面張力以及匙孔內腔中連續產生的蒸汽壓力達到動態平衡。隨著激光束的不斷移動,匙孔始終處于動態穩定,也就是說,匙孔和圍著孔壁的熔融金屬隨著激光束前進而向前移動,熔融金屬不斷地填充著匙孔,最后熔融材料冷卻,焊縫形成[22]。
2 激光焊接中常用的傳感技術
在實際生產過程中,通常都需要較大的焊接功率和較高的焊接速度,但是深熔焊過程中匙孔和熔池不穩定會導致焊接缺陷和焊縫偏離,為了保證焊接質量就必須實現實時焊縫跟蹤[23]。由于焊接過程伴隨著一系列物理化學變化,這些物理化學變化包含著各種各樣的用于檢測激光焊接狀態的信息。例如,焊接過程中工件材料遇高溫熔化后產生的紅外、近紅外和可見光等熱輻射;金屬材料遇熱后會蒸發及膨脹從而產生的聲波信號;金屬蒸汽產生的紫外、可見光和近紅外輻射等電磁輻射。這些信號均可用于檢測激光焊接狀態和焊接質量,不可能直接測量焊接區域的特征信號,在實際焊接狀態和質量檢測中一般采用視覺傳感技術[24-25]。目前國內外關于激光焊接過程中的焊縫位置信息檢測的方法主要集中在以下幾種技術。
2.1結構光視覺傳感技術
結構光視覺傳感技術焊縫跟蹤成像原理如圖2所示。激光二極管發出一可見光譜段的激光束透過一圓柱透鏡后,轉變成條形結構光投射到具有不同接頭的待焊工件焊縫上,條形結構光因焊縫具有不同的接頭或形變而產生變形,并被CCD攝像機攝取漫反射回來變形后的條形結構光信號,最后將采集到的信號通過三角形測量原理、圖像處理技術以及模式識別技術完成焊縫位置提取[26-27]。結構光視覺傳感技術因測量精度高、抗干擾能力強、較高的信噪比、易于提取圖像信息等優點,而在現代工業上應用廣泛[28-29]。但此方法還存在著至今無法解決的缺陷,它不但存在著導前誤差,而且檢測的焊縫間隙大小有限。對于等厚平板對接焊來說,通常只能有效檢測大于0.15 mm的焊縫間隙,對于小于0.15 mm的焊縫間隙,還需在焊接前對對接焊縫開微坡口,使結構光在焊縫處產生變形。這不但增加了加工步驟和成本而且還降低了焊接效率。而對于橫跨在緊密對接及無坡口的微間隙焊縫(焊縫寬度小于0.1 mm)上的結構光形變微乎其微,所以無法檢測[30-31]。此外,檢測過程中的二次反光、光亮條紋分布不均勻,焊接過程中的輻射光、煙霧及飛濺都會影響著結構光視覺傳感法的檢測效果,還需在檢測過程中增加復雜的圖像處理過程。
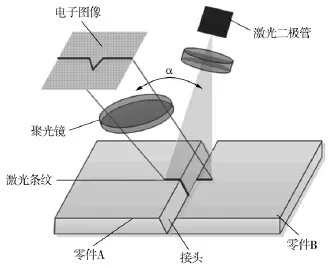
圖2 結構光視覺傳感技術焊縫跟蹤成像原理
以測量V形焊縫寬度為例,采用主動式機器視覺檢測法,可獲得如圖3a所示的結構光圖像,在攝像頭前加窄帶濾光片,提取結構光圖像,對提取的圖像進行線性平滑濾波、二值轉換、邊緣提取,這樣便完成了圖像預處理過程,其結果如圖3b所示。其中,點L與點R之間的縱坐標差值為焊縫寬度,因此點L與點R便成為圖像識別對象。對這兩點的識別,分別采用逐點掃描法、截距法和斜率法進行寬度識別。實驗結果表明在線性平滑濾波取9×9,圖像二值轉化取0.45,邊緣檢測用Canny算法,寬度識別用斜率法(見圖3c)時焊縫識別算法效果最好[32]。
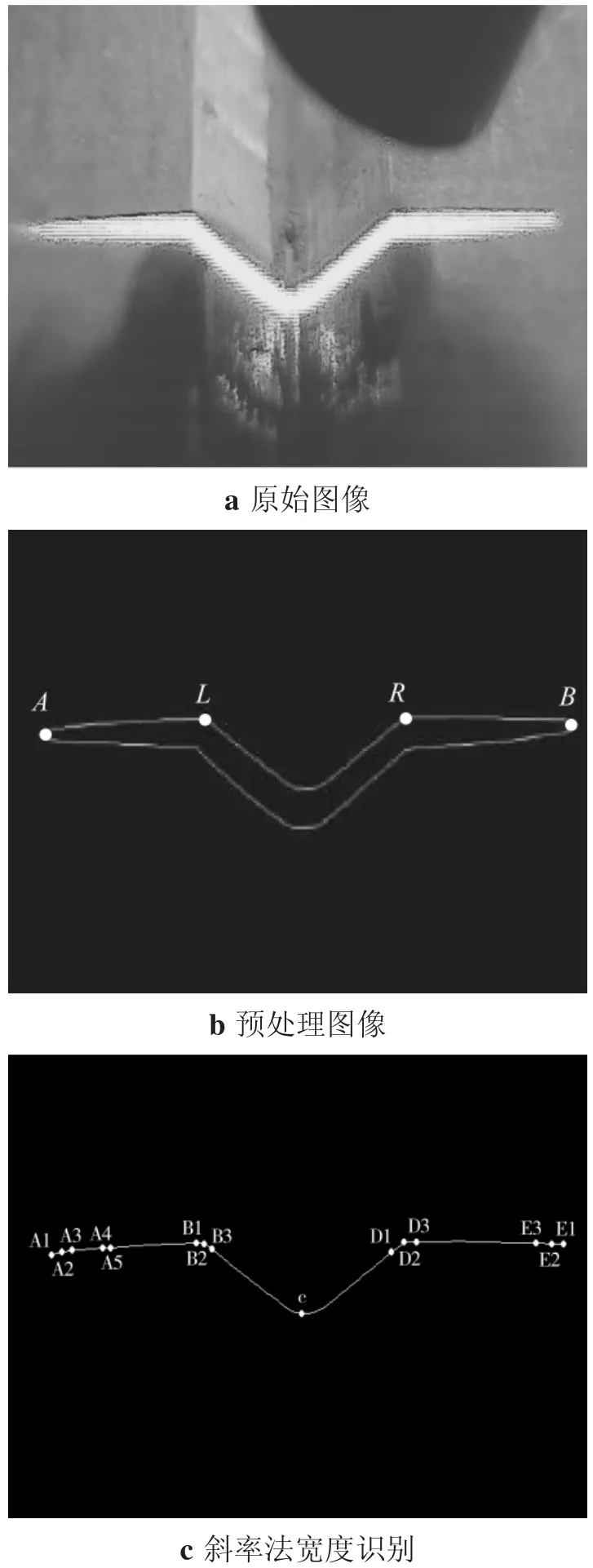
圖3 焊縫寬度識別過程[32]
2.2紅外傳感方法
紅外檢測是利用任何溫度高于絕對零度的物體都是紅外輻射源的原理,當改變了物體的結構或者物體內部存在缺陷時,物體的熱傳導率也會變化,導致物體表面溫度的變化。熱輻射和溫度的變化存在于整個焊接過程中,并包含著焊接質量信息,因此焊接熔池及周圍會形成一定的溫度場并伴隨紅外輻射,熔池周圍產生的溫度場和紅外輻射通常是對稱均勻分布,一旦焊縫偏離,溫度場也隨之變化,通過使用紅外攝像機直接拍攝熔池獲取紅外熱像,并定量分析采集到的興趣區域紅外熱像,可以獲得焊頭偏離焊縫的量化信息[33-34]。
兩塊焊縫間隙小于0.1 mm的304不銹鋼板(150 mm×100 mm×10 mm),在激光功率為10 kW、激光束直徑為200 μm、焊接速度為2.5 m/min、攝像機采集速度為1 000 f/s的條件下,采用激光束路徑斜跨焊縫的方式(激光束先左偏離焊縫中心1 mm,到與焊縫對中,再到右偏離焊縫中心1 mm)進行平板對接焊,匙孔的圖像處理過程如圖4所示,其形變參數(匙孔最下端位置處的列坐標Ky,最左端位置處的列坐標Ay,最右端位置處的列坐標By)采樣曲線如圖5所示,焊件實物如圖6所示。由圖5可知,焊縫偏差近似呈現線性變化的趨勢,但是隨著焊接過程中熔池的劇烈擾動,匙孔形變也會在一定范圍內波動,造成焊縫偏差值隨之波動。紅外傳感方法通常用于電弧焊或焊件背面傳感激光焊的焊縫識別,由于劇烈的熔池和溫度變化使之很難獲得層次分明的紅外圖像,再加上紅外傳感器易受環境干擾并存在精度不高等問題,所以該方法還無法精確地實現微間隙對接焊縫的檢測。
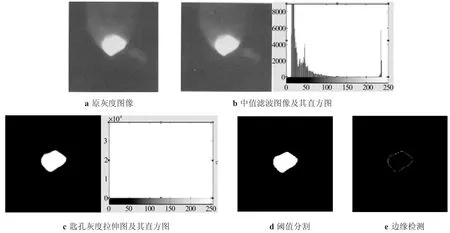
圖4 匙孔的圖像處理
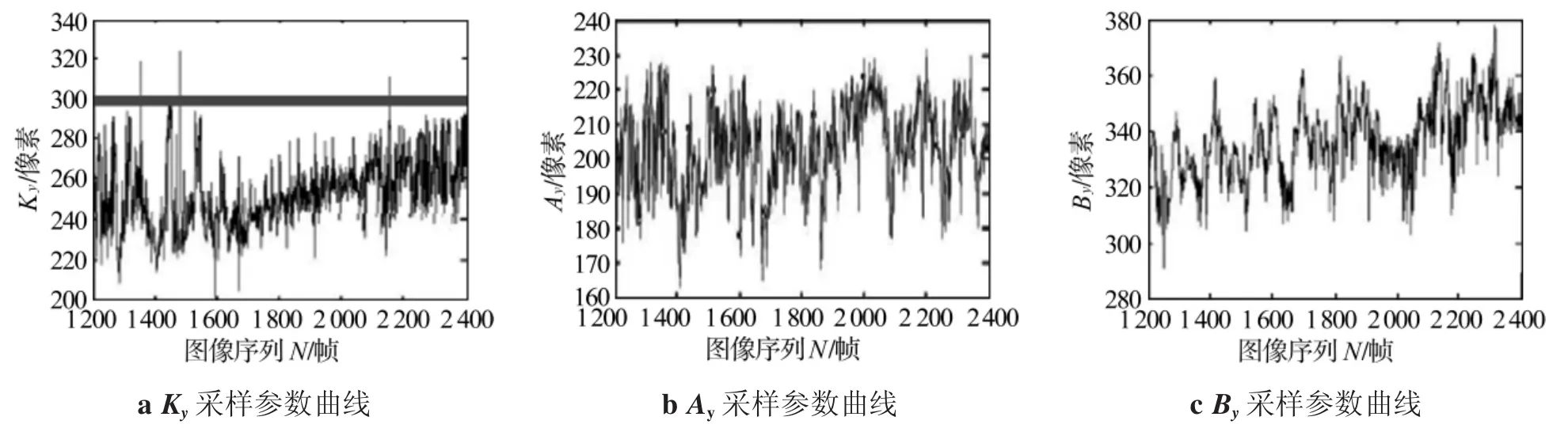
圖5 匙孔形變參數采樣曲線
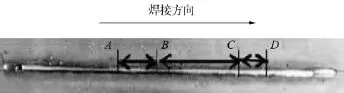
圖6 焊件實物[
2.3同軸視覺檢測技術
同軸視覺檢測是基于激光發射器的獨特結構,設計出來的一種監視器與激光發射器同軸的檢測方法,從而達到同軸視覺檢測的目的[35]。此種方法可以直接攝取激光束正下方熔池和匙孔圖像,通過分析圖像的灰度分布、溫度分布及其變化規律來識別焊縫中心。尤其在使用激光掃描的遙控焊接當中,由于激光束不斷變化,采用同軸視覺檢測技術可以有效的進行實時監測[36]。由于直接攝取了熔池圖像,所以基本上不存在導前誤差,但是實驗裝置比較復雜,不易安裝,只適合功率較小的焊接裝置,圖7為同軸視覺檢測系統的工作原理[37]。
待焊工件是焊縫間隙為0.2 mm的鍍鋅鋼板(厚1.2 mm),在激光功率小于4 kW、激光束直徑為0.4 mm條件下,通過同軸測量獲得熔池和匙孔信息,對獲得的圖片進行區域增長算法和Canny算法,最后獲得灰度圖和具有光滑邊界的匙孔和熔池截面圖。焊縫的寬度可以根據匙孔的灰度分布獲得,并且可以根據匙孔的灰度圖和熔池的深度來判斷不同的焊接狀態。圖8為匙孔的圖像處理過程,圖9為匙孔的特征參數,其中L為熔池寬度,D為匙孔頂部直徑,d為匙孔底部直徑。通過測量L可以得到實際的焊縫寬度,通過測量d/D的比例可以得出熔融的狀態,實驗結果表明,當測量的焊縫寬度L和焊縫實際的寬度之差ΔL與實際焊縫平均寬度L-之比小于等于12%時,即ΔL/L-≤12%說明焊接狀態比較平穩,當ΔL/L->12%時焊接狀態就不穩定,需要調節激光功率和焊接速度等,甚至要停止焊接。當d/D>0.56時焊接狀態就會達到過熔融狀態,當d/D<0.56時焊接會達到合適的熔融狀態[38]。

圖7 同軸視覺檢測系統的工作原理

圖8 匙孔的圖像處理過程
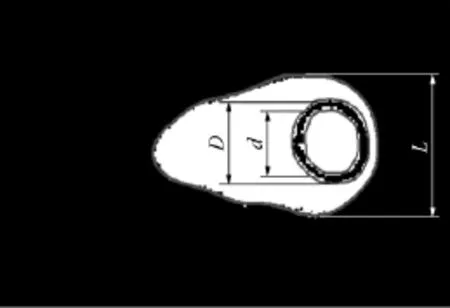
圖9 匙孔的特征參數
2.4磁光成像傳感技術
磁光成像是利用磁感應原理及法拉第礠光旋轉效應構成磁光傳感器以實時獲取目標圖像的技術[39-40]。法拉第磁旋光效應為當一束線偏振光通過旋光性介質時,如果在介質中沿光傳播方向施加外磁場,則光通過介質后,光的振動面就會轉過一角度θ。法拉第磁光效應如圖10所示。轉角θ在材料確定的情況下,主要與光的波長、外磁場的強度、光在介質中經過的路程有關,對于順磁或抗磁介質[41],轉角θ為

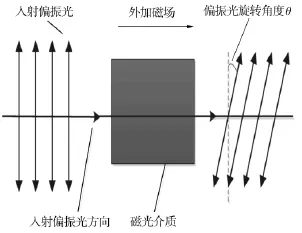
圖10 法拉第磁光旋轉效應原理
式中B為外加磁場磁感應強度;L為介質中的光程;V為費爾德(Verdet)常數。
磁光傳感器原理如圖11所示,單色高功率發光二極管(LED)發出的光經起偏器作用變為線偏振光,線偏振光會通過磁光介質后被光反射面反射回來。由于光反射面下方焊縫處的垂直磁場分量發生變化,在磁光效應下使線偏振光的偏振方向發生一定角度的偏轉,包含了焊縫信息的線偏振光經檢偏振器檢偏后被CMOS成像裝置接收,形成焊縫磁光圖像[42]。
尺寸100 mm×79 mm×1.84 mm、縫隙0~0.1 mm的焊件實物及焊縫帶磁時的磁光圖像如圖12所示。焊件在采樣速度為25幅/s、分辨率為2 592像素×1 944像素、焊接速度24 cm/min的條件下進行焊接,獲得的磁光圖像經中值濾波、灰度變換、分割、二值化及形態學處理,提取焊縫磁光圖像的過渡帶作為焊縫位置特征。由此得出焊縫的實際位置和測量位置以及測量誤差,結果如圖13、圖14所示,焊縫測量誤差值如表2所示。由圖13可知,焊縫實際值和測量值基本重合,說明磁光檢測對于微間隙焊縫有良好的跟蹤性能。由圖14和表2可知,系統的測量誤差最小值接近零,標準誤差為0.017 mm,平均誤差為0.022 mm,這說明磁光檢測對微間隙焊縫的測量精度較高[43]。
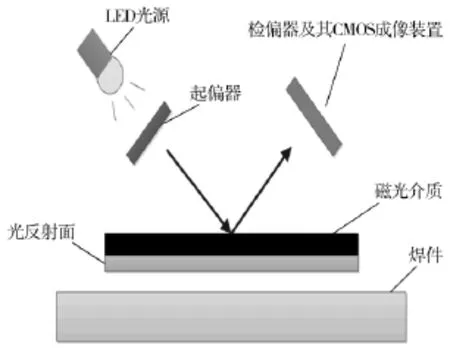
圖11 磁光傳感器原理
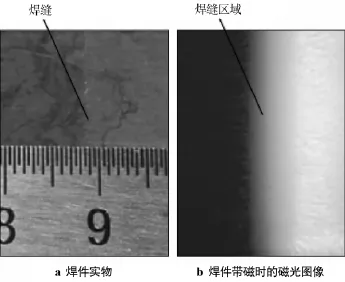
圖12 焊件實物及其礠光圖像
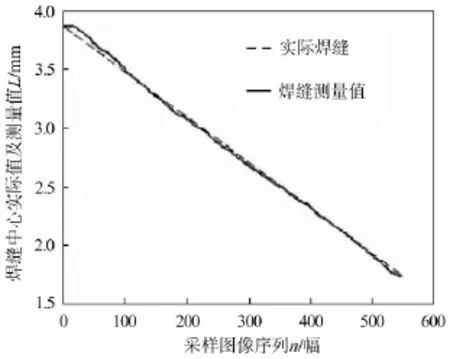
圖13 焊縫中心實際值與焊縫中心測量值
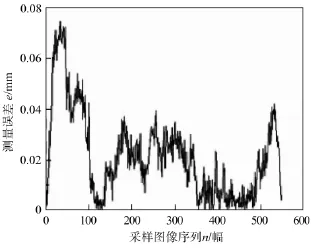
圖14 焊縫位置測量誤差
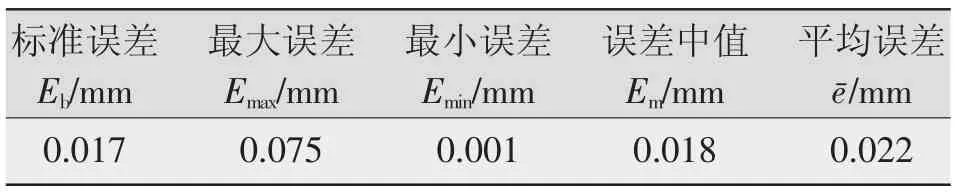
表2 焊縫測量誤差統計
磁光傳感器具有優良的電絕緣性能、抗干擾、頻響寬、響應快和安全防爆等特性,因此對一些特殊場合電磁參數的測量有其獨特的功效,尤其在電力系統中高壓大電流的測量方面更顯示其潛在優勢,能有效檢測低碳鋼微間隙對接焊縫(間隙<0.1 mm)。磁光檢測焊縫時不受焊接速度的影響[42]。激光焊接試驗結果表明,利用磁光成像技術在不同的試驗條件下均能有效地檢測焊縫位置。
3 總結和展望
國外發達國家對焊縫跟蹤與檢測技術研究開始較早,發展也比較迅速,深入研究了控制算法和傳感器。國內在焊縫跟蹤與檢測方面起步較晚,但是隨著焊接在工業生產中占據著越來越重要的位置,國內也進行了大量研究,并在某些特定的應用中獲得了成功。
目前國際上對微間隙對接焊縫還不具備可靠的焊縫檢測和跟蹤方法,在焊接前需要對焊縫表面加工微坡口,或花費相當多的時間用于工件的裝配、夾持及精確調整,激光束大多按預先設定的路徑運動,而由于在加工過程中,工件的熱變形、裝配誤差等往往使得焊縫偏離預先設定的路徑,這種預先設定焊接軌跡的方法時常無法避免焊縫出現較大的偏差,難以滿足現實工業焊接要求。如何克服現有技術的不足,探索磁光成像自動檢測及跟蹤方法在微間隙對接焊縫中的應用是未來研究方向之一。
[1]Marcel Bachmann,Vjaceslav Avilov,Andrey Gumenyuk,et al.Experimental and numerical investigation of an electromagnetic weld pool support system for high power laser beam welding of austenitic stainless steel[J].Journal of Materials Processing Technology,2014(214):578-591.
[2]Deyong You,Xiangdong Gao,Seiji Katayama.Visual-based spatter detection during high-power disk laser welding[J]. Optics and Lasers in Engineering,2014(54):1-7.
[3]Tenner F,Brock C,Klampfl F,et al.Analysis of the correlation between plasma plume and keyhole behavior in laser metal welding for the modeling of the keyhole geometry[J].Optics and Lasers in Engineering,2015(64):32-41.
[4]Mingjun Zhang,Genyu Chen,Yu Zhou,et al.Optimization of deep penetration laser welding of thick stainless steel with a 10 kW fiber laser[J].Materials and Design,2014(53):568-576.
[5]Seiji Katayama,Yousuke Kawahito,Masami Mizutani.Latest progress in performance and understanding of laser welding [J].Physics Procedia,2012(39):8-16.
[6]陳華斌,黃紅雨,林濤,等.機器人焊接智能化技術與研究現狀[J].電焊機,2013,43(4):8-15.
[7]龔燁飛,戴先中,李新德,等.一種基于結構光視覺的焊縫跟蹤特征提取方法[J].電焊機,2009,39(4):51-55.
[8]盛仲曦,馬宏波,衛善春,等.基于視覺傳感的焊縫跟蹤技術[J].上海交通大學學報,2010(44):130-133.
[9]高向東,莫玲,仲訓杲,等.大功率光纖激光焊焊縫跟蹤偏差紅外檢測方法[J].物理學報,2011,60(8):737-744.
[10]高向東,游德勇,Katayama Seiji.大功率光纖激光焊焊縫跟蹤偏差測量新方法[J].焊接學報,2011,32(5):49-52.
[11]叢煥武,郭福娟,呂飛,等.基于CCD圖像處理的焊縫識別技術研究[J].電子測量技術,2012,35(3):73-77.
[12]劉習文,洪波,戴鐵峰.激光視覺焊縫跟蹤圖像處理與坡口識別[J].激光與紅外,2011,41(7):804-807.
[13]洪波,熊炳衛,李湘文,等.一種基于擺動式渦流傳感器的焊縫跟蹤方法[J].焊接學報,2012,33(3):9-12.
[14]Xiang-dong GAO,Qian WEN,Seiji KATAYAMA.Analysis of high-power disk laser welding stability based on classification of plume and spatter characteristics[J].Transactions of Nonferrous Metals Society of China,2013(23):3748-3757.
[15]徐國建,王虹,唱麗麗,等.激光焊接的特性[J].電焊機,2010,40(11):57-64.
[16]Nawi I N,Saktioto,Fadhali M,Hussain M S,et al.Nd:YAG Laser Welding of Stainless Steel 304 for Photonics Device Packaging[J].Procedia Engineering,2011(8):374-379.
[17]劉金合.高能密度焊[M].西安:西北農業大學出版社,1995:116-120.
[18]伍強.汽車用高強鍍鋅鋼的CO2激光焊接研究[D].長沙:湖南大學激光研究所,2007.
[19]王家淳.激光焊接技術的發展與展望[J].激光技術,2001,25(1):48-53.
[20]劉永華.磁光成像焊縫跟蹤偏差自動檢測[D].廣州:廣東工業大學,2014.
[21]秦國梁,楊永波,李連勝,等.Nd:YAG CW激光熱傳導焊(Ⅱ激光熱傳導焊臨界功率的計算)[J].焊接學報,2003,24(3):23-27.
[22]張成磊.光纖激光深熔焊主動式在線同軸監測研究[D].長沙:湖南大學,2013.
[23]Gleb Turichin,Evgeniy Zemlyakov,Konstantin Babkin,et al.Monitoring of Laser and Hybrid Welding of Steels and Al-alloys[C].Physics Procedia,2014(56):1232-1241.
[24]X D Gao,S J Na.Detection of weld position and seam tracking based on Kalman filtering of weld pool images[J].Journal of Manufacturing Systems,2005,24(1):1-12.
[25]B Fabrice,C Adolfo,M L H Jose,et al.Optical techniques for real-time penetration monitoring for laser welding[J]. Applied Optics,2005(44):3869-3876.
[26]謝春暉.基于結構光的焊縫視覺檢測技術研究[D].武漢:華中科技大學,2006.
[27]孫良海.激光結構光焊縫跟蹤技術瓶頸及對策研究[D].北京:中國地質大學,2011.
[28]霍平,李寧寧,張海旺,等.結構光視覺傳感器模型分析與研究[J].電焊機,2014,44(4):108-111.
[29]Huang Wei,Kovacevic R.Development of a real-time laserbased machine vision system to monitor and control welding processes[J].International Journal of Advanced Manufacturing Technology,2012,63(1/4):235-248.
[30]張伯奇,鄭軍,潘際鑾.基于視覺檢測的對接焊縫跟蹤方法[J].電焊機,2010,40(12):15-18.
[31]高向東,黃健源,莫玲.激光焊接不銹鋼微間隙焊縫偏差角點檢測法[J].焊接學報,2013,34(12):1-4.
[32]游德勇,高向東,許娜芬,等.焊縫識別算法的參數優化設計[J].焊接技術,2010,39(12):7-10.
[33]Xiangdong Gao,Deyong You,Seiji Katayama.Infraredimage recognition for seam tracking monitoring during fiber laser welding[J].Mechatronics,2012(22):370-380.
[34]Goyal V K,Ghoshb P K,Sainic J S.Analytical studies on thermal behaviour and geometry of weld pool in pulsed current gas metal arc welding[J].Journal of materials processing technology,2009(209):1318-1336.
[35]Kratzsch C,Abels P,Kaierle S,et al.Coaxial process control during laser beam welding of tailored blanks[J].Prceedings AHPLA99,High-power Laser in Manufacturing,Proc,SPIE 3888,2000:472-482.
[36]Cheol-Hee Kim,Do-Chang Ahn.Coaxial monitoring of keyhole during Yb:YAG laser welding[J].Optics&Laser Technology,2012(44):1874-1880.
[37]莫玲.大功率光纖激光焊接路徑紅外檢測新方法[D].廣州:廣東工業大學,2011.
[38]Yi Zhang,Chenglei Zhang,LipengTan,et al.Coaxial monitoring of the fibre laser lap welding of Zn-coated steel sheets using an auxiliary illuminant[J].Optics&Laser Technology,2013(50):167-175.
[39]Zeng Zhiwei,Liu Xin.A parametric study of magnetooptic imaging using finite-element analysis applied to aircraft rivet site inspection[J].IEEE Transactions on Magnetics,2006,42(11):3737-3744.
[40]高慶吉,胡丹丹,牛國臣,等.基于磁光圖像的飛機鉚釘缺陷識別[J].中國圖像圖形學報,2007,12(12):2179-2183.
[41]朱目成,周肇飛,賀春光.精細表面下細小缺陷的磁光渦流成像實時探測[J].中國激光,2005,32(6):848-851.
[42]Xiangdong Gao,Yonghua Liu,DeyongYou.Detection of micro-weld joint by magneto-optical imaging[J].Optics &Laser Technology,2014(62):141-151.
[43]高向東,甄任賀.微間隙焊縫磁光成像檢測方法[J].焊接學報,2014,35(4):11-14.
Sensing methods of seam tracking in laser welding process
XU Erjuan1,GAO Xiangdong1,XIAO Zhenlin2,CHEN Xiaohui2
(1.School of Electromechanical Engineering,Guangdong University of Technology,Guangzhou 510006,China;2.Guangzhou Panyu Gofront Dyeing&Finishing Machinery Manufacturer Ltd.,Guangzhou 511400,China)
Laser welding has become an important technology in the welding manufacturing.Some advanced tracking systems should be used to ensure the accuracy of seam tracking in the process of laser welding.The application of sensing technology provides the best solution for real-time seam tracking.The principle,advantages and disadvantages of the newest structure light vision sensor, infraredsensor,coaxialvisioninspection,magneticopticalimagingsensingtechnologyarereviewed,andapplicationexamplesarepresented.
laser welding;seam tracking;weld detection;sensing technology
TG409
C
1001-2303(2016)01-0028-08
10.7512/j.issn.1001-2303.2016.01.07
2014-10-09;
2015-05-18
國家自然科學基金資助項目(51175095);廣東省自然科學基金資助項目(10251009001000001);廣東省學科建設科技創新資助項目(2013KJCX0063)
許二娟(1989—),女,河南周口人,在讀碩士,主要從事焊接自動控制的研究。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
建材發展導向(2021年6期)2021-06-09 05:57:08
裝備制造技術(2021年1期)2021-05-21 07:55:04
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
金屬加工(熱加工)(2020年12期)2020-02-06 05:59:00
制造技術與機床(2018年12期)2018-12-23 02:40:58
制造業自動化(2017年2期)2017-03-20 14:26:13