基于STM32芯片的移動機器人的避障研究
2016-12-21 10:44:40徐鼎新符秀輝
電子技術與軟件工程 2016年20期
關鍵詞:移動機器人
徐鼎新++符秀輝
摘 要 隨著移動機器人走進千家萬戶,針對移動機器人的路徑規劃以及如何規避障礙物,提出了一種基于ARM Cortex-M3內核的STM32單片機控制超聲波傳感器以及舵機進行機器人避障的解決方案。分析了由微處理器如何控制機器人使其產生避障行為,使其在某些障礙物環境下繞出狹窄區域;使其順著障礙物前進直到開闊地帶。實驗結果表明,本系統電路簡單,抗干擾性強,測量精度高。此方案能夠穩定的控制移動機器人進行有效的避障,驗證了該方案的的實時性和可行性。
【關鍵詞】移動機器人 STM32單片機 超聲波傳感器 避障
1 引言
隨著近幾年來機器人技術的快速發展,機器人產業已展現出強大的生命力。機器人的應用領域不斷擴大如:生活服務與娛樂,軍事偵察,科學探測,工農業生產等等。機器人的性能逐漸提高并且正在向智能化方向發展。移動機器人作為新型的勞動工具,在改變勞動模式,提高勞動效率,減輕勞動強度等方面展現出極大的優越性。伴隨著人工智能技術、電子技術、計算機技術、傳感器技術、驅動技術及機器人技術的飛速發展,室內移動機器人控制系統的更高層次的研究和開發已具備了十分堅實的基礎和較好的發展前景。目前對室內移動機器人影響比較大的重要技術是:傳感器技術、噪音控制技術、自動清洗技術、清潔空間高度較低區域的技術和自動避障路徑規劃技術。本文提出了一種基于STM32單片機對移動機器人自動避障規劃的解決方案。探討了移動機器人的避障原理,詳細的研究了系統的硬件設計,軟件流程。對實驗結果進行了分析后證明本方案電路簡單,抗干擾性好,測量精度完全滿足移動機器人的避障要求。
2 移動機器人避障系統硬件介紹
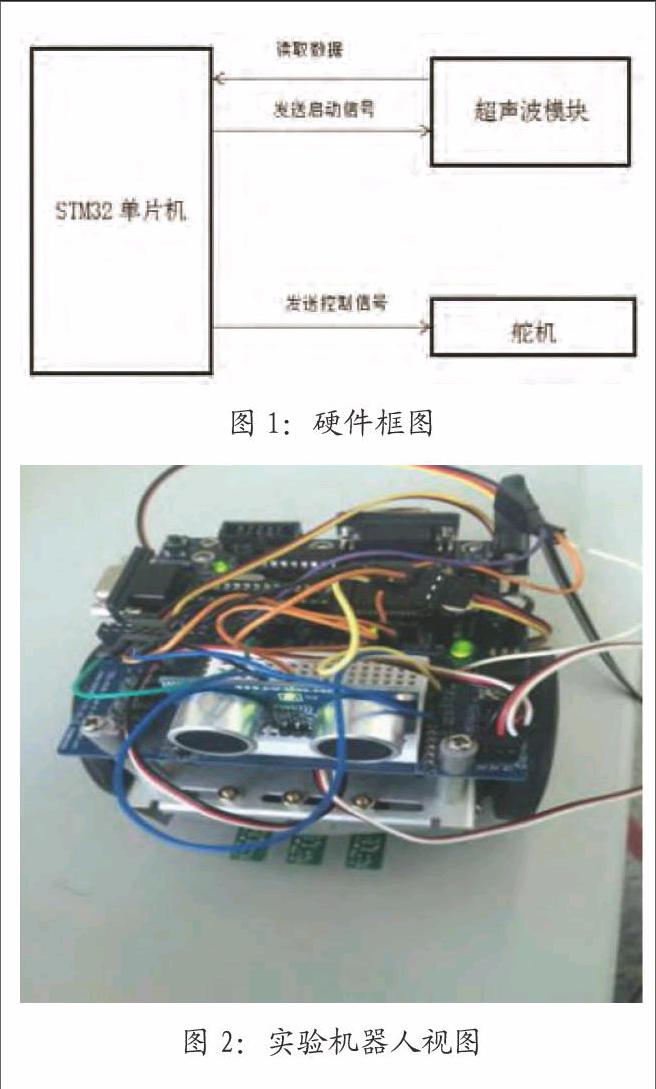
移動機器人的避障系統主要由舵機與超聲波模塊構成,超聲波模塊安裝在舵機之上。為使移動機器人能夠自動避障,使用超聲波進行避障,通過超聲波接收到的信號,判斷出障礙物的位置情況來進行多個方向的避障,在行進的過程中,機器人對前方的障礙物進行檢測并根據障礙物的情況做相應的轉彎,并改變舵機的旋轉方向并重復前面的行進過程。
由于超聲傳感器存在固有測量盲區,對近距離內的障礙物無法檢測,因此本文采用紅外傳感器彌補超聲波傳感器的測量盲區。處于超聲波傳感器的兩端。圖1為移動機器人避障系統的硬件設計框圖。圖2為本實驗所使用機器人。
3 移動機器人的避障方案
3.1 移動機器人的避障方案
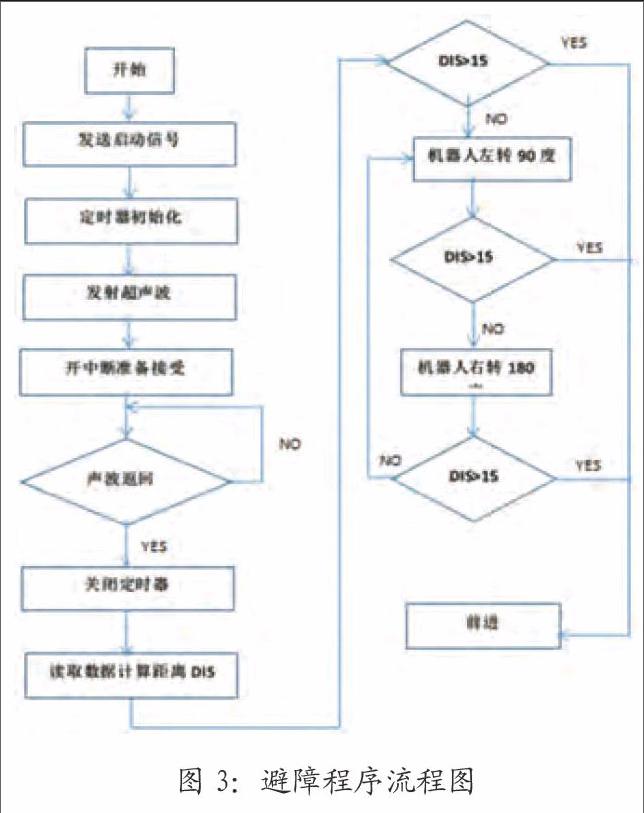
當移動機器人開始工作時,先使機器人繞房間行駛一周,測量出擦地區域的長和寬,并計算出清潔區域的面積,記錄下最大的X軸與Y軸的行進距離。限定以后行駛路徑的范圍。之后將移動機器人放在需測量的初始位置,然后沿y軸正向前進,當機器人運行前面出現障礙物時,該機器人的避障系統便會測定障礙物的位置,STM32芯片便會產生中斷進入中斷程序,在中斷程序內調整舵機方向使機器人轉彎,機器人會繞過障礙物并繼續前進。若機器人的前方沒有障礙物移動機器人會繞著測量區域進行往返運動直到之前測量所記錄下的X軸Y軸的最大位置為止。圖3為避障程序流程圖。其中DIS為機器人與障礙物之間的距離,單位為cm。
3.2 機器人的避障實驗的實現
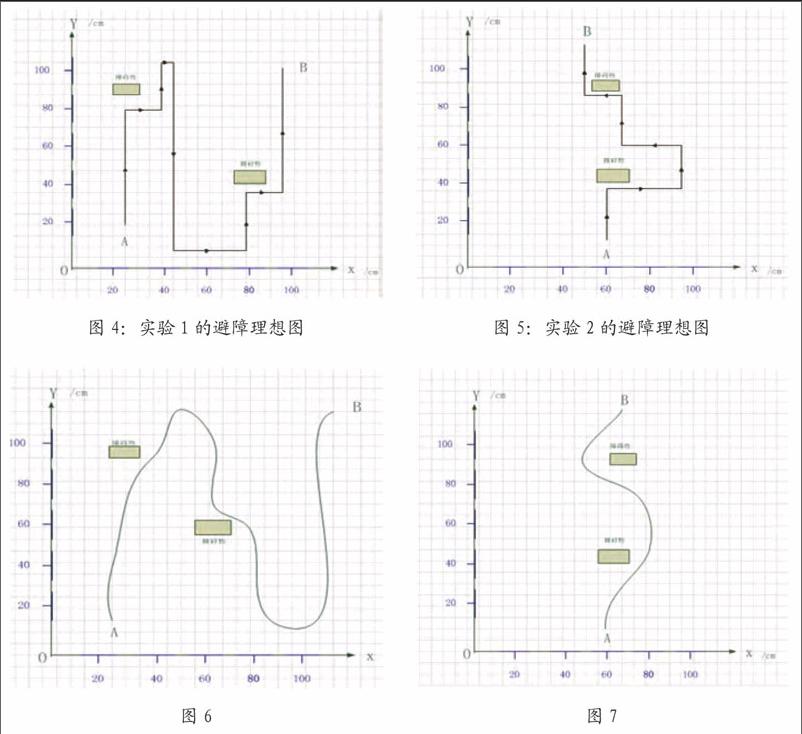
實驗環境的搭建,需要黑色電工膠布、足夠白的白板與障礙物的完美契合。首先將黑色電工膠布圍成一個矩形,但是在矩形的四角要做成圓弧形狀,以便于機器人更加順利的轉彎。與此同時,在矩形的區域內放上兩個障礙物,需要強調的是兩個障礙物必須成規則方塊狀,在實驗區域內隨機擺放。分別做兩次實驗:1兩障礙物在區域內成45度角,其中一個障礙物在機器人正前方,另一個障礙物在其右下方。機器人在區域內的A點到達預定目標B點。 2 兩障礙物在區域內一前一后放在機器人前面,讓其穿過兩障礙物從A運動到B點。
其后,將移動機器人放在無障礙物的一個黑色角落上,隨即啟動電源開關。順時針行走時,可以明顯的觀察到機器人沿著黑色電工膠布前進,當遇到拐角時可以自動右轉,當遇到障礙物時,先是左轉90度,然后再次遇到障礙物,隨后右轉180度,機器人未檢測到障礙物,繼續沿著黑色電工膠布軌跡前進。
當機器人在遇到下一個無障礙弧度拐角時,機器人將繼續依照舵機上的超聲波傳感器接收到的信號進行小幅度左轉,然后才會轉彎。圖4為實驗1的機器人理想避障圖,圖5為實驗1的機器人理想避障圖。
4 實驗結論
在圖6為機器人在區域左下角A點出發途徑兩個障礙物到達右上角B點的軌跡。
在圖7中實驗難度有所增加,由區域正下方A點到區域正上方B點 機器人必須由障礙物中間穿行。
由以上實驗可知,整個系統的設計以STM32單片機為核心,利用了超聲波避障傳感器,將軟件與硬件相結合可以實現以下功能:移動機器人在行駛的過程中能夠實現直道和弧形軌道的前進,若有偏離能夠自動糾正,返回到預設軌道。 當機器人探測到前方檢測的障礙物可以自動的調整躲避障礙物,從無障礙的區域通過。
參考文獻
[1]蔣新松.機器人學導論[M].沈陽:遼寧科學技術出版社,1994:511-516,543-554.
[2]樸松昊,洪炳熔.一種動態環境下移動機器人的路徑規劃方法[J].機器人,2003,25(01):18-21.
[3]彭艷,顧國昌.基于遺傳算法的水下機器人大范圍路徑規劃[J].應用科技,2003,30(02):18-21
[4]劉義,張宇.基于改進人工勢場法的移動機器人局部路徑規劃的研究[J].現代機械,2006(06):48-50.
[5]馬艷 ,劉華波,徐淑華. 室內清潔機器人路徑規劃的設計[J].機械與電子,2008(07):64-67.
作者單位
沈陽化工大學信息工程學院 遼寧省沈陽市 110142
猜你喜歡
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
四川輕化工大學學報(自然科學版)(2021年3期)2021-08-30 06:37:02
中國慣性技術學報(2019年3期)2019-10-15 07:21:02
電子測試(2018年15期)2018-09-26 06:01:34
制造技術與機床(2017年3期)2017-06-23 08:11:21
智能系統學報(2015年4期)2015-12-27 09:38:35
機電產品開發與創新(2014年5期)2014-03-11 16:42:32
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:09
中國海洋大學學報(自然科學版)(2014年8期)2014-02-28 12:21:31
中國海洋大學學報(自然科學版)(2014年7期)2014-02-28 12:21:19