基于天花板的移動機器人視覺定位方法的研究
2017-01-12 09:48:30朱瑩瑩謝明王德明梅磊鄧歆
現(xiàn)代電子技術 2016年23期
關鍵詞:移動機器人
朱瑩瑩+謝明+王德明+梅磊+鄧歆
摘 要: 為了實現(xiàn)室內(nèi)移動機器人的自定位,考慮到室內(nèi)的復雜程度和環(huán)境特色,設計一種基于單目視覺的移動機器人定位系統(tǒng)。機器人在室內(nèi)帶有天花板路標信息的環(huán)境下,以顏色和形狀結(jié)合的路標作為特征,通過機器人頭頂與天花板垂直的攝像機,運用彩色圖像分割輪廓矩匹配的方法識別路標,解析路標攜帶的世界坐標信息,從而計算出機器人的全局位置和航向角。該方法大大提高了圖像處理和特征提取的速度,通過實驗驗證,其滿足定位系統(tǒng)的實時性和魯棒性要求。
關鍵詞: 視覺定位; 天花板; 移動機器人; 路標; 彩色圖像分割
中圖分類號: TN911.73?34; TP391.41 文獻標識碼: A 文章編號: 1004?373X(2016)23?0129?04
Research on ceiling?based visual location method of mobile robot
ZHU Yingying, XIE Ming, WANG Deming, MEI Lei, DENG Xin
(College of Electrical Engineering and Control Science, Nanjing Tech University, Nanjing 211816, China)
Abstract: In order to realize the self?location of the indoor mobile robot, a mobile robot location system based on monocular vision was designed in consideration of the indoor complexity and environment feature. The landmark combining color and shape is taken as the robot feature in the indoor environment with the ceiling landmark information. The color image segmentation and contour matching method is used to recognize the landmark by means of the camera whose head is vertical to the cei?ling, so as to analyze the world coordinate information of the landmark, and calculate the global position and azimuth angle of the robot. This method can improve the speed of image processing and feature extraction greatly. The experimental results show this method can satisfy the requirements of system real?time performance and robustness.
Keywords: visual location; ceiling; mobile robot; landmark; color image segmentation
0 引 言
在移動機器人研究的領域中,自主定位和導航一直是研究的熱點,其中定位一直是首要解決的問題,即確定移動機器人在全局環(huán)境中的位置和方向。目前對于不同的傳感器提出了很多定位方法,主要分為相對定位法和絕對定位法。隨著機器視覺的圖像處理技術的不斷提高,路標定位法的高速度、高精度的特點使其應用更加廣泛。文獻[1]提出了一種基于直線和單特征點的視覺推算定位方法,通過固定在移動機器人上的攝像機提取天花板圖像中的兩條相交直線及其交點,通過直線的方向估計機器人的方位,再根據(jù)相交點的像素坐標變化量推算出機器人的位置。文獻[2]提出了一種在天花板上貼人工混合編碼路標的方法,通過選取合適的動態(tài)閾值提取路標像上的編碼信息和重心坐標,從而換算出機器人在環(huán)境中的位置和航向,實現(xiàn)定位。文獻[3]提出一種可用于圖書館內(nèi)圖書運載車的車輛室內(nèi)自動定位定向方法,借鑒二維條形碼思想設計路標,將路標放置在圖書館天花板上,由安裝于圖書運載車上,且光軸和天花板垂直的攝像機進行識別定位。文獻[4]利用彩色圖像對移動機器人進行定位,將顏色轉(zhuǎn)換到HSI空間中,在結(jié)構(gòu)上采用全局靜態(tài)視覺,給移動機器人設置著色標記,利用標記的顏色信息識別移動機器人從而確定其位置。
本文提出一種基于天花板路標的機器人視覺定位方法,設計出一種顏色和形狀結(jié)合、具有高識別度的路標,移動機器人頭頂安裝攝像頭,指向并垂直于天花板平面,機器人在行駛過程中采集天花板路標,通過圖像預處理、顏色分割、特征提取等技術定位人工路標,解讀路標中包含的世界坐標信息,計算機器人的當前位置和航向角。
1 系統(tǒng)描述
本系統(tǒng)的載體為人形移動機器人,如圖1所示。在機器人頭頂安裝一部單目攝像機,攝像機實時采集天花板,圖像處理模塊將攝取的圖像進行處理、識別、匹配進行定位。因此設計合理的路標是實現(xiàn)快速定位的關鍵。
1.1 路標設計
根據(jù)室內(nèi)的環(huán)境,設計一種可以安置在天花板上的彩色路標,每個路標都具有惟一的顏色圖形組合,同時每個路標攜帶坐標信息。
直接采用顏色和字母形狀的組合,可以適當拉開色度的差距,從真彩色圖像量化成8 b圖像,即256色,再根據(jù)實際中的面積選擇顏色和字母圖形個數(shù)進行組合。例如在256色中選擇20種顏色,圖形選擇10個字母作為模板,可以組合200種路標。并且通過字母的朝向獲得航向角(其中摒棄上下對稱的字母),直接計算出移動機器人的方向。
1.2 路標識別和信息提取
路標定位是具有明顯區(qū)別于環(huán)境,能夠被傳感器通過相應算法識別的物體。通常情況下,路標所處的環(huán)境位置是不變的或者路標的位置是已知的,基于此,機器人可以在檢測到預訂路標的情況下對自身位置進行再次修正。對于機器人而言,定位的主要任務就是采用合適的算法對設置的路標進行識別,并且根據(jù)識別的結(jié)果計算路標所代表的環(huán)境信息,以此確定機器人的位置,實現(xiàn)機器人的定位。
2 視覺系統(tǒng)
本移動機器人可以采用在雙輪差速移動平臺上配有雙機械臂的設計方案,使用紅外和超聲傳感器相結(jié)合的方式作為機器人的避障傳感器系統(tǒng),并以全局視覺和雙目立體視覺作為主要的機器人傳感器系統(tǒng),實現(xiàn)了餐廳服務機器人在餐廳環(huán)境下的移動導航、定位及避障功能,成功完成服務機器人的自主取菜、送菜及點菜等任務。
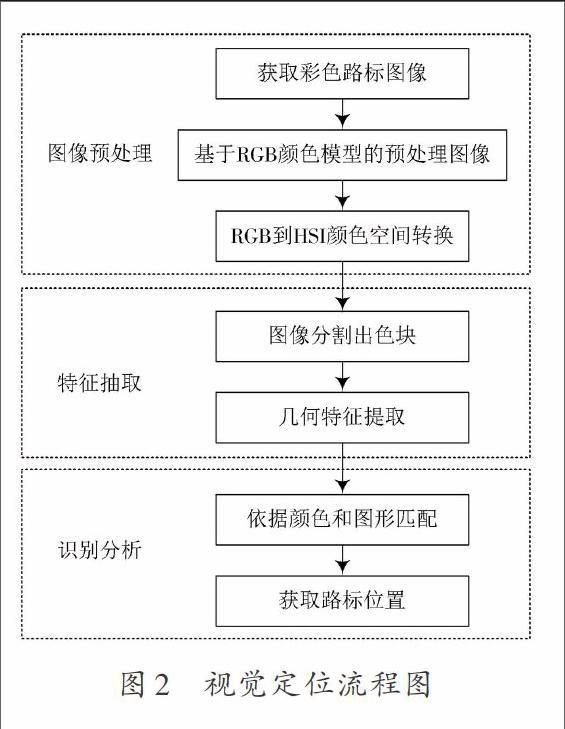
實驗系統(tǒng)的處理流程如圖2所示,通過對彩色圖像的閾值分割獲得顏色信息,再進行特征提取獲得路標中包含的坐標信息,從而實現(xiàn)定位。
2.1 色彩空間轉(zhuǎn)換
RGB顏色空間常用于顯示系統(tǒng),但不適合于圖像分割和分析。HSI顏色空間是一種和人眼的視覺感知相吻合的色彩空間,它的三個顏色分量相對獨立。由于人的視覺對亮度的敏感程度遠強于對顏色濃淡的敏感程度,人的視覺系統(tǒng)經(jīng)常采用HSI色彩空間, 它比RGB色彩空間更符合人的視覺特性。在圖像處理和計算機視覺中,大量算法都可在HSI色彩空間中方便地使用,它們可以分開處理而且是相互獨立的。因此,在HSI色彩空間可以大大簡化圖像分析和處理的工作量。所以,為了提高識別效果,獲得具有適應性調(diào)節(jié)的顏色特征。所以先將RGB顏色空間轉(zhuǎn)化到HSI顏色空間,再進行彩色圖像分割。由RGB空間到HSI空間的變換為:
[H=θ,2π-θ,B≤GB>GS=1-3R+G+BminR,G,BI=13R+G+B] (1)
式中:[θ=cos-112R-G+R-BR-G2+R-BG-B]。如果飽和度[S]為0,色調(diào)[H]就沒有定義,如果強度[I]為0,飽和度[S]就沒有定義。
2.2 基于彩色空間的顏色分割
HSI模型用[H,S,I]三參數(shù)描述顏色特性。其中[H]表示色調(diào),定義顏色的波長;[S]表示飽和度,形容顏色的深淺程度;[I]表示強度或亮度。色調(diào)[H]主要由可見光光譜中各分量成分的波長來確定,為光譜波長分布中波峰的位置,是顏色光的基本特征。如果以顏色作為主要分割依據(jù),那么色調(diào)[H]具有單調(diào)惟一的特性。色調(diào)值[H]由角度表示,從0°~360°的變化范圍正好對應可見光從紅到紫的所有顏色。為此,可采用基于色調(diào)[H]直方圖統(tǒng)計的自適應閾值化法對圖像進行分割。
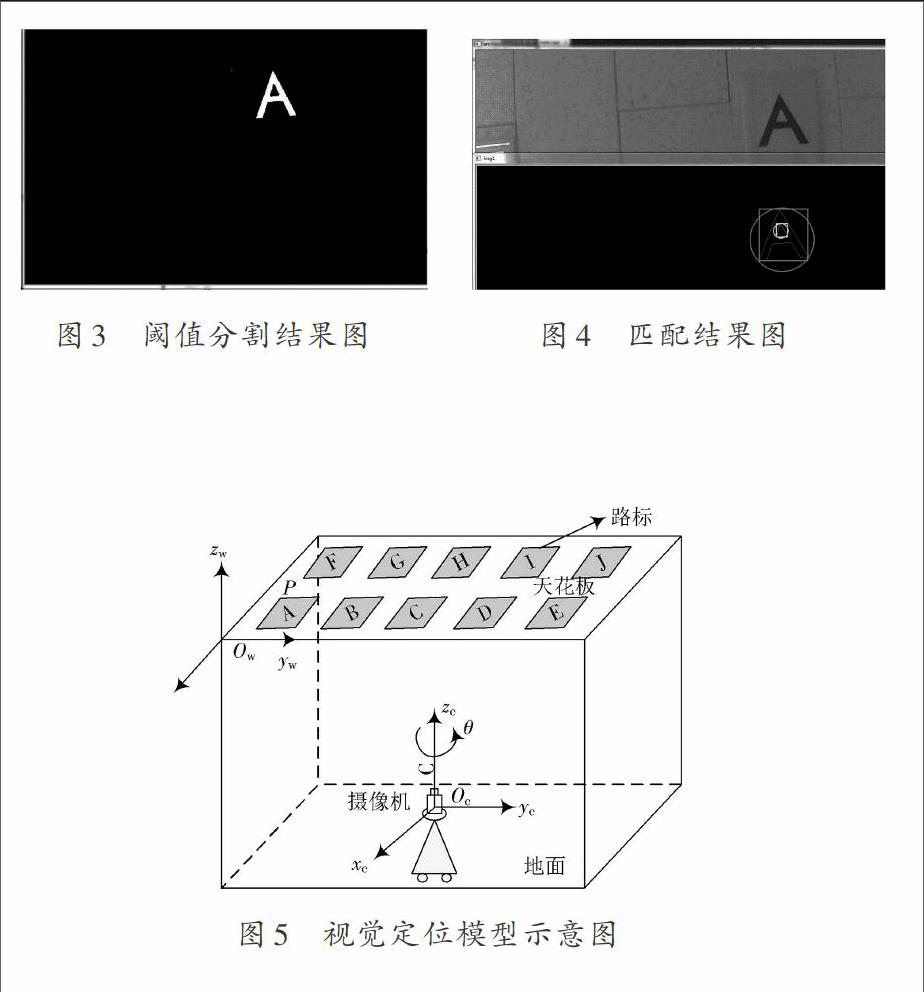
對彩色圖像的分割現(xiàn)已提出了許多算法, 這些算法可分為四大類:基于鄰域的方法,直方圖閾值法,色彩空間聚類的方法和基于模糊集理論的方法。其中,基于閾值分割的方法最早被使用,運算簡便且速度快。直方圖閾值法廣泛應用于單色圖像的分割,當目標或背景內(nèi)相鄰像素的灰度值高度相關而處于目標和背景交界處兩邊的像素的灰度值差別很大時,選擇合適的閾值進行分割效果最好。閾值為82時效果最好,分割結(jié)果如圖3所示。
2.3 字母圖形提取、識別
顏色分割后,視覺系統(tǒng)獲得路標的顏色信息,繼而進行對圖案的提取識別。幾何特征提取的方法有很多,基本上都是根據(jù)提取的圖像邊緣的特征進行檢測。常用的有兩種:整體和局部方法。本系統(tǒng)采用整體方法中的不變矩特征提取Hu矩匹配路標字母形狀。OpenCV庫函數(shù)cvMatchShape()計算兩個物體的矩再根據(jù)提供的標準進行比較。圖4為天花板上的實際路標圖像與路標模板匹配的結(jié)果。匹配結(jié)果返回為0,表示匹配正確,解析出路標[A]的實際坐標為(100,100)。
3 定位系統(tǒng)
機器人頂部的攝像機在運動過程中相對于天花板平面的特征圖像塊沒有尺度變化發(fā)生,僅有旋轉(zhuǎn)和仿射變換,因此可以有效地縮短特征提取、匹配的時間,減小計算復雜度,同時具有很高的定位精度。
3.1 視覺模型
基于天花板的視覺定位模型示意圖如圖5所示。攝像機安裝在餐服機器人的頭頂,并垂直指向天花板。假定地面與天花板均為平面,且兩個平面互相平行。將世界坐標系建立在天花板上。
攝像機采用小孔模型,自然光經(jīng)物體反射到達攝像機的感光元件形成物體的圖像。攝像機坐標系原點建立在光軸中心處,其[z]軸與攝像機光軸中心線方向平行,攝像機到天花板方向為正方向,圖像坐標沿水平增加的方向為[x]軸正方向。假設攝像機的內(nèi)參數(shù)已經(jīng)預先標定,內(nèi)參數(shù)模型為:
[uv1=kx0u00kyv0001xczcyczc1] (2)
3.2 視覺推算定位
在機器人首次標定之后,攝像機的投影矩陣不再變化,旋轉(zhuǎn)矩陣不再變化,在以后的定位中只要知道一個世界坐標就可以確定機器人的位置。
設路標像中字母朝向為正方向。圖像中心、路標像中心與世界坐標的關系如圖6所示。圖中[P]點表示圖像中某路標的中心;[Q]點表示圖像的中心;[xwOyw]坐標系代表環(huán)境坐標系。[xPy]坐標系代表路標坐標系。[PQ]表示向量[PQ]的模,即[P]點與[Q]點之間的距離;[α]表示機器人行駛的航向角;[β]為路標像中心到圖像中心的連線與世界坐標系[xw]軸的夾角;[θ]為[x]與[xw]的夾角。
圖6 圖像中心、路標像中心與世界坐標的關系圖
根據(jù)圖6所示的幾何關系,可以獲得路標坐標系[xPy]中[Q]點坐標(單位:像素)的計算公式為:
[xB=PQcosθ=PQcos(β-α)yB=PQsinθ=PQsin(β-α)] (3)
若路標的全局坐標為[(x1,y1)],則移動機器人的全局坐標[(xR,yR)]為:
[xR=x1+SxQ=x1+SPQcos(β-α)yR=y1+SyQ=y1+SPQsin(β-α)] (4)
4 實驗結(jié)果分析
本文的載體是人形移動機器人。該移動機器人最大移動速度為0.7 m/s,身高140 cm。行走動力源采用鉛酸電池,其他動力源可以采用鋰電池,充電一次可以連續(xù)工作4 h。機器人所用攝像頭為USB3.0攝像頭,焦距為3.6 mm,500萬像素。實驗中以Win7 64位系統(tǒng)為開發(fā)平臺,VS2010和OpenCV2.4.9為軟件編程環(huán)境。實驗在室內(nèi)實驗室環(huán)境下進行。
天花板到移動機器人頭頂攝像頭的距離是218 cm,天花板上各路標間距20 cm。比例系數(shù)[S]由天花板路標實際長度與攝像機圖像平面上的同一位置長度比值決定,經(jīng)實際測量[S=2.66。]
機器人實驗移動軌跡如圖7所示。“*”代表實驗過程中機器人的測試位置,“o”代表世界坐標系中的路標實際位置。實驗中,移動機器人從起始坐標點(100,100)沿順時針方向運動一圈回到起始點附近。移動過程中,利用本文方法進行在線實時定位,采集處理了天花板上的20個路標點,其中最大誤差為33 cm,最小誤差為2 cm。從圖7可以看出,測量位置和實際位置基本一致。采樣點的誤差曲線如圖8所示,橫軸是采樣點,縱軸是測量位置和實際位置的歐氏距離。
移動機器人在行駛過程中,根據(jù)路標字母的朝向獲得航向角,進行幾組單獨的航向角實驗來驗證航向角精度。令機器人沿一條直線行駛,即航向角[α]不變時,觀察比較系統(tǒng)計算獲得的航向角。結(jié)果數(shù)據(jù)如表1所示。
通過多次實驗測量結(jié)果統(tǒng)計發(fā)現(xiàn),移動機器人航向角的測量誤差不超過3°,移動機器人的位置誤差不超過2%。對于餐廳環(huán)境來說,這些誤差在允許范圍內(nèi)。
5 結(jié) 語
機器人工作在特定的環(huán)境中,主要完成迎賓、導購、對話等任務。這對機器人位置的精確度和運動的實時性要求很高。本文針對移動機器人的自動定位導航應用,提出了一種基于彩色路標的室內(nèi)定位方法。雖然此方法需要在室內(nèi)天花板按照一定規(guī)則粘貼各種圖案的路標,但是可以根據(jù)環(huán)境風格進行優(yōu)化,而且路標制作簡單、價格低廉、適用性強。并且通過實驗說明該路標方法具有簡單、魯棒性高、實時性好的特點,為接下來的路徑規(guī)劃和自主導航打下了堅實的基礎,具有很好的應用前景。
參考文獻
[1] 韓立偉,徐德.基于直線和單特征點的移動機器人視覺推算定位法[J].機器人,2008,30(1):79?84.
[2] 章小兵,宋愛國,唐鴻儒.基于視覺的室內(nèi)移動機器人精確定位方法[J].數(shù)據(jù)采集與處理,2007,22(2):196?200.
[3] 王建功,林國余.室內(nèi)圖書運載車的計算機視覺定位定向方法[J].閩江學院學報,2014(5):73?80.
[4] 吳衛(wèi)國,陳輝堂,王月娟,等.基于彩色圖像的移動機器人定位[J].機器人,1999,21(5):340?346.
[5] KAEHLER A, BRADSKI G R. Learning OpenCV [M]. US: O′Reilly, 2009.
[6] 馬爽,樊養(yǎng)余,雷濤,等.一種基于多特征提取的實用車牌識別方法[J].計算機應用研究,2013,30(11):3495?3499.
[7] 徐德,譚民,李原.機器人視覺測量與控制[M].2版.北京:國防工業(yè)出版社,2014:180?183.
[8] 胡山,許增樸,于德敏,等.基于彩色色標的服務機器人定位研究[J].制造業(yè)自動化,2005,27(2):38?40.
[9] PARK D, KAPUSTA A, YOU K K, et al. Learning to reach into the unknown: selecting initial conditions when reaching in clutter [C]// Proceedings of 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems. Atlanta: IEEE, 2014: 630?637.
[10] 陰國富.基于閾值法的圖像分割技術[J].現(xiàn)代電子技術,2007,30(23):107?108.
[11] 應在恩,李正洋,平雪良,等.基于雙目視覺動態(tài)跟蹤的機器人標定[J].計算機應用研究,2014,30(5):1424?1427.
[12] 林開顏,吳軍輝,徐立鴻.彩色圖像分割方法綜述[J].中國圖象圖形學報,2005,10(1):1?10.
[13] 查志強.復雜背景下的快速車牌識別技術研究[D].南京:南京理工大學,2013.
猜你喜歡
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
四川輕化工大學學報(自然科學版)(2021年3期)2021-08-30 06:37:02
中國慣性技術學報(2019年3期)2019-10-15 07:21:02
電子測試(2018年15期)2018-09-26 06:01:34
制造技術與機床(2017年3期)2017-06-23 08:11:21
智能系統(tǒng)學報(2015年4期)2015-12-27 09:38:35
機電產(chǎn)品開發(fā)與創(chuàng)新(2014年5期)2014-03-11 16:42:32
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:09
中國海洋大學學報(自然科學版)(2014年8期)2014-02-28 12:21:31
中國海洋大學學報(自然科學版)(2014年7期)2014-02-28 12:21:19
