壓鑄機周邊取件手的設計
2017-03-09 09:40:50王文博劉躍坤周黎明
時代農機 2017年12期
關鍵詞:設計
王文博,劉躍坤,周黎明
(商丘工學院,河南 商丘 476000)
1 蝸輪連桿機械的總體設計方案
此設計的機械手由電機和氣缸來驅動。利用四桿機構原理實現手臂的旋進和旋出。當手臂旋進后,整體機身會有一個橫行前進的位置。當整體機身橫行前進到手爪能完全夾取產品的料柄時,手爪夾緊。夾取完后手臂旋出至后退限,手爪有一個90°的翻轉過程,然后松開手爪將壓鑄件放至傳送帶。
2 蝸輪連桿機械手的組成和特點
蝸輪機械手是由底座、橫行機構、取出機構組成。連接電機的減速箱固定安裝在工作面板的下方作為一個整體套裝在橫行導桿上;取出機構的支撐桿安裝在工作面板上并和手臂連接以起到支撐手臂的作用,主動桿與主動軸和手臂連接,帶動手臂和支撐桿進行運動,取件機械手的取出機構各關節點均為轉動副。
3 蝸輪連桿機械手的設計
蝸輪連桿機械手設計的原始數據如表1所示。

表1 蝸輪連桿取出機的設計基礎參數
3.1 手臂和夾爪的設計方案
本機械手采用的是連桿式回轉機構,用伺服電機進行驅動。根據要求最終尺寸確定如下:主動桿:443mm;副桿:550mm;主副桿間的連桿:219mm;手臂總長:1140mm;主動桿和副桿安裝點的中心距:250mm;分量dx=112mm,dy=219mm,主動桿的回轉角度為150°,副桿的回轉角度為100.84°。
根據原始數據可設計其手爪所夾取的工件料柄直徑范圍為Ф50mm~Ф90mm,選取所夾取的料柄直徑為Ф60mm。所夾取的工件重量選取4kg。驅動手爪夾緊和松開所用氣缸的行程為20mm,手爪夾緊時所張開的角度為55.05°,手爪松開時張開角度為84.86°。
3.2 相關設計計算
首先需計算出手臂需要的轉矩及功率,從而再確定出電機的功率、轉速和型號等。經計算,可選取的電機型號為TCBP7112 0.37kW B3。
(1)橫行氣缸的設計。機身進行水平橫行伸縮運動時,不僅要克服摩擦阻力(包括氣缸與活塞之間的摩擦阻力、導向桿與軸承套之間的摩擦阻力等),還要克服啟動、停止過程中的慣性力以及背壓等幾方面的阻力。計算后選擇橫行氣缸型號SCA2-50-250。
(2)夾爪旋轉氣缸的設計計算。當手臂旋出至后退極限位置時,手爪需要一個將物料由水平方向轉至豎直方向的翻轉動作,然后夾手松開,放開物料,這樣放置物料更方便,不會導致物料損壞。
①手爪驅動力的計算。圖1為連桿杠桿式手爪結構,對其進行手爪受力分析。作用在治具缸接頭1上的驅動力為F,兩連桿2對治具缸接頭的反作用力為F1、F2。
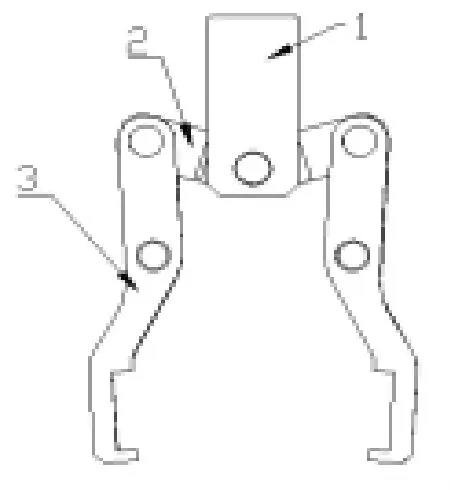
圖1 連桿杠桿式手爪結構
手指對工件的夾緊力可按下式計算:

式中:K1為安全系數,取K1=6;K2為工作情況系數,K3為方位系數,根據《工業機械手設計》表2選取K2=5;G為被抓取工件所受重力(N),G=40N。由式(1)中的手爪結構的受力分析驅動力F,由連桿杠桿式結構的驅動力計算得:F計算=970.89N。取手指傳力效率η=0.8;則:F實際=1088.61N。
③夾緊缸的結構尺寸計算。手爪的驅動方式為氣動方式,即運用氣缸驅動。所選用的氣缸為單作用彈簧復位氣缸,其工作壓力為0.5MPa。選用氣缸為SDA-63-20-B。
根據前面所所述及相關計算,得出部分結構設計參數如下:蝸桿減速器的模數2,減速比60,蝸桿分度圓直徑25mm,蝸桿頭數1,蝸輪齒數60;選用TCBP7112 0.37kW B3型號的電機;選用橫行氣缸的型號為SCA2-50-250;選用AD-2525型號的緩沖器;選用的夾爪旋轉氣缸型號為QGK-2RSD40T9 0-A2;選用SDA-63-20-B型號的夾緊缸。
3.3 機身設計
機身是直接支撐和驅動手臂的部件。一般實現臂部的升降、回轉或俯仰等裝置或傳動件都安裝在機身上,或者直接構成機身的軀干與底座相連。因此,臂部的運動越多,機身的結構和受力情況就越復雜。
臂部和機身的配置形式基本上反應了機械手的總體布局。機械手的機身設計成機座式,這種機械手是具有橫行前進功能的,當然在某些情況下也可以撤銷橫行前進的功能,這要視具體的工作情況而定。此次所設計的機械手具有橫行前進功能。
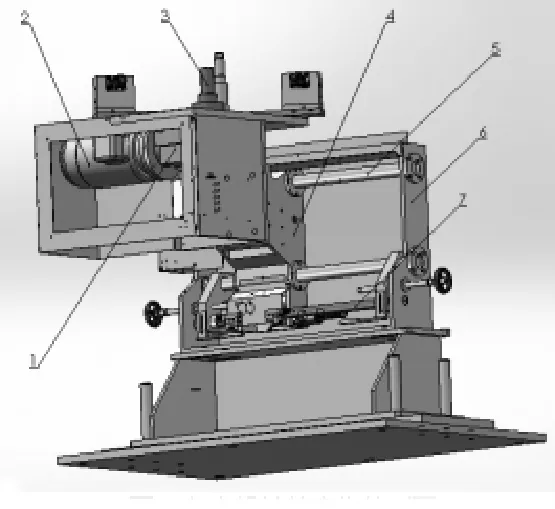
圖2 機身設計的軸測實物視圖
如圖2所示為機身的軸測實物視圖,地基板與底座相固定,地基板固定于底面上,而橫行座固定在底座上面。軸承套通過固定在橫行座上的兩導桿而固定在橫行座上,在橫行坐的左面固定安裝一氣缸,氣缸的活塞桿與軸承套相連接,而軸承套的正面與橫行箱體通過螺栓相連接,剎車電機與渦輪減速箱相連接,兩部分作為整體與橫行箱體相連接,這樣就可以將整個裝置緊密的連接在一起。在給氣缸通氣后,氣缸通過活塞桿將軸承套向前推動,這樣軸承套就可以帶動箱體整體一起運動,達到機身的橫行前進。箱體的兩極限位置是由安裝在軸承套上的微動開關座上的兩行程開關來控制控制箱體的開始位置以及停止位置。微動開關的開閉是通過固定在導桿和輔助導桿上的橫行撞塊上的微動開關撞塊來實現的,當箱體運動到左邊微動開關位置時,觸碰微動開關閉合,這樣控制系統將接受信息,控制氣缸進氣,這樣橫行箱體將停止在極限后退位置上,同理當箱體運動到右邊觸碰到右邊的微動開關閉合時,控制系統接受信息,控制氣缸進氣,箱體將停止在前進極限位置上。兩橫行撞塊的安裝位置將影響整個箱體的開始位置和終止位置。手臂是通過安裝在減速箱上的渦輪軸心和箱體上的副軸心來固定位置的,這樣就可以帶動整個手臂以及手爪運動。
4 結語
文章在得到取件機的大致結構尺寸及基本參數之后,對蝸輪連桿取件機械手的手臂和夾爪進行方案設計,并且對驅動電機、蝸輪減速箱、橫行氣缸、緩沖器等進行了計算和選型。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04