Matlab在機械原理課程設計中的應用研究
2017-03-12 20:39:47劉相權
教育教學論壇 2016年52期
劉相權
(北京信息科技大學 機電工程學院,北京 100192)
摘要:本文以六桿機構牛頭刨床為例,在運動學分析的基礎上,應用Matlab軟件編程實現了牛頭刨床的位移、速度和加速度的變化曲線,完成了對牛頭刨床的運動仿真,通過使用Matlab,為機械原理課程設計的改進提供了一個新的思路。
關鍵詞:Matlab;機械原理;課程設計;六桿機構;運動仿真
中圖分類號:G642.0 文獻標志碼:A 文章編號:1674-9324(2016)52-0077-02
機械原理課程設計是機械原理課程重要的實踐環節,培養學生機械系統運動方案設計的初步能力。目前機械原理課程設計的方法有圖解法和解析法兩種,圖解法需要學生列出矢量方程式,作圖求解,其優點是幾何概念清晰、形象,缺點是作圖比較煩瑣、精度不高[1]。解析法需要學生針對給定機構建立運動學模型,求解出位移方程、速度方程和加速度方程、編程求解,根據求解結果繪制相應曲線。解析法需要學生具有一定的編程能力,其優點是求解精度高,培養了學生運用現代化的手段解決設計問題的能力。
Matlab是美國Mathworks公司開發的大型科學計算軟件,本文以機械原理課程設計中常見的牛頭刨床為例,首先利用矩陣法對機構進行運動學分析,然后利用Matlab編程求解,繪制仿真曲線,直觀再現牛頭刨床從動件的運動規律。
一、牛頭刨床工作原理概述
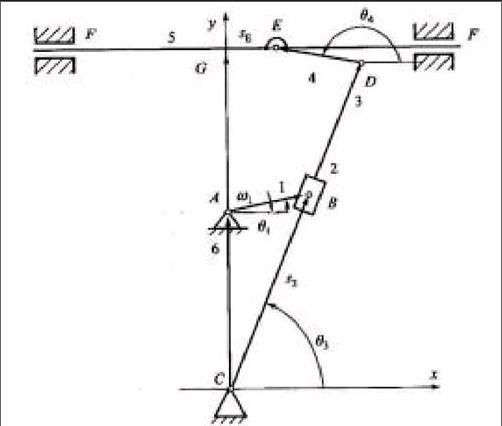
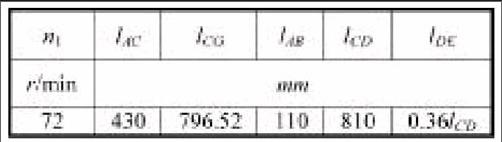
牛頭刨床是一種用于平面切削加工的機床,圖1所示為牛頭刨床主運動機構的運動簡圖,由導桿機構1-2-3-4-5帶動刨頭5及其上的刨刀作往復切削運動。刨頭右行時,刨刀速度較低,刨刀進行切削,為工作行程。刨頭左行時,刨刀快速退回,刨刀不切削,有急回特性,為空回行程。設計數據如表1所示。在工作行程中,牛頭刨床受到很大的切削阻力(在切削前后各有一段約0.05H的空刀距離,H為行程距離),而空回行程中則沒有切削阻力[2]。
二、Matlab仿真分析及參數測量
當牛頭刨床六桿機構中導桿CD處于左極限位置時,曲柄與x軸夾角為194.84度,刨頭上E點坐標為(796.52,-495.5),為便于分析,以此位置作為曲柄順時針旋轉和刨頭位移的起始位置,在Matlab中編寫程序,首先定義各桿長度及曲柄旋轉角速度,然后根據先前推導的運動學方程編程實現[3],其源代碼如下:
n1=72;w1=2*pi*n1/60;Lac=430;
Lcg=796.52;Lab=110;Lcd=810;Lde=291.6;
dy1=[];ddy1=[];Pos=[];
for theta1=(194.82/180*pi):-pi/100:
(194.82/180*pi-2*pi)
S3=sqrt((Lab*cos(theta1))^2+(Lac+Lab*sin(theta1))^2);
theta3=acos(Lab*cos(theta1)/S3);
theta4=pi-asin((Lcg-Lcd*sin(theta3))/Lde);
Se=Lcd*cos(theta3)+Lde*cos(theta4);
SS=[theta1,theta3,theta4,S3,Se]';
Pos=[Pos,SS];
A=[cos(theta3),-S3*sin(theta3),0,0;
sin(theta3),S3*cos(theta3),0,0;
0,-Lcd*sin(theta3),-Lde*sin(theta4),-1;
0,Lcd*cos(theta3),Lde*cos(theta4),0];
B=[-Lab*sin(theta1)*w1,Lab*cos(theta1)*w1,0,0]';
dy=A\B;
dy1=[dy1,dy];
dA=[-dy(2)*sin(theta3),
-dy(1)*sin(theta3)-S3*dy(2)*cos(theta3),0,0;
dy(2)*cos(theta3),
dy(1)*cos(theta3)-S3*dy(2)*sin(theta3),0,0;
0,-Lcd*dy(2)*cos(theta3),-Lde*dy(3)*cos(theta4),0;
0,-Lcd*dy(2)*sin(theta3),-Lde*dy(3)*sin(theta4),0];
dB=[-Lab*cos(theta1)*w1^2,-Lab*sin(theta1)*w1^2,0,0]';
ddy=A\(dB-dA*dy);
ddy1=[ddy1,ddy];
end
theta1=-1*(Pos(1,:)*180/pi-194.82);
theta3=Pos(2,:)*180/pi;
theta4=Pos(3,:)*180/pi;
S3=Pos(4,:);
Se=Pos(5,:)+495.5;
Ve=-1*dy1(4,:);
Acc=ddy1(4,:);
plot(theta1,Se),grid on
xlabel('曲柄轉角(^o)');
ylabel('刨刀位移(mm)');
axis([0,360,0,450]);
title('位移曲線')
plot(theta1,Ve(1,:)),grid on
xlabel('曲柄轉角(^o)');
ylabel('刨刀速度(mm/s)');
axis([0,360,-2250,1500]);
title('速度曲線')
plot(theta1,Acc(1,:)),grid on
xlabel('曲柄轉角(^o)');
ylabel('刨刀加速度(mm/s^2)');
axis([0,360,-20000,20000]);
title('加速度曲線')
編好程序后,可調用繪圖函數繪制相應的位移、速度和加速度曲線。
三、結束語
將Matlab引入機械原理課程設計的教學中,能夠使學生掌握利用解析法計算公式設計機構的實際技能,提高學生利用計算機進行機械設計的能力,激發學生的學習興趣,使其動手能力和創新能力均得到提高。
參考文獻:
[1]孫恒,作模.機械原理[M].北京:高等教育出版社,2012.
[2]羅洪田.機械原理課程設計指導書[M].北京:高等教育出版社,1998.
[3]楊綠云.Matlab軟件在機械原理教學中的應用[J].鄭州工業大學學報,2010,5:P525-526
