圖像識別技術與移動增強現實技術的結合
2017-03-22 23:15:56吳振宇
電子技術與軟件工程 2017年3期
關鍵詞:結合
摘 要增強現實技術是當前發展最為迅速,同時也最具潛力的領域之一,其本身在許多方面都表現出了良好的優越性,尤其是伴隨著移動智能終端的發展和普及,移動增強現實技術逐漸產生,為技術的發展揭開了新的一頁。本文以提升移動增強現實技術應對大規模復雜場景的能力著手,結合圖像識別技術,設計出了相應的移動增強現實系統,希望能夠滿足實際應用需求。
【關鍵詞】圖像識別技術 移動增強現實技術 結合
移動互聯網技術的飛速發展,使得移動增強現實技術(MAR)受到了越來越多的關注,在實際應用中的關鍵技術包括了交互技術、顯示技術以及跟蹤定位技術等。在長期的發展中,對于相關算法的研究多集中在室內環境,對于室外的復雜場景適應性不足,無法完成大規模圖像的實時跟蹤注冊。對此,本文提出了基于圖像識別技術的MAR系統。
1 系統總體架構
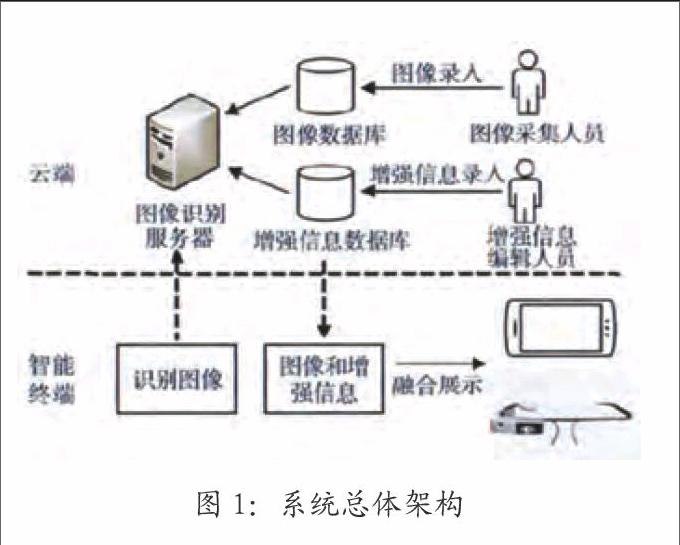
MAR系統采用了C/S架構,可以實現對于場景圖像、增強信息以及人員的管理,其中數據管理主要是利用管理系統,建立起相應的場景圖像數據庫和增強信息數據庫,對相應的數據信息進行存儲,同時建立索引,以方便用戶進行信息的檢索;人員管理主要是針對圖像采集人員和采編人員的管理,采編人員需要將采集到的圖像以及與之關聯的增強信息輸入到數據庫中。結合云端的存儲功能和計算能力,系統可以完成對于樣本的訓練以及圖像的快速識別。系統總體架構如圖1所示。
2 基于圖像識別的跟蹤注冊算法
2.1 改進特征描述算法
在室外場景中,存在著大量結構類似的建筑工程,受其影響,如果使用BRISK或者SURF等算法進行圖像特征匹配,并不能取得預期的效果,對此,相關研究人員提出了以重力方向解決相似特征的誤匹配問題,并且取得了顯著的成果。假定存在有四個特征點,其通過鄰域像素灰度信息計算特征點主方向,而且僅僅相差一個旋轉角度,如果特征點鄰域旋轉到主方向,計算出的特征描述將會變得缺乏典型性和區分性。而如果利用重力傳感器信心,在BRISK或者SURF算法的特征描述中加入重力信息,可以生成Gravity-BRISK和Gravity-SURF描述,使得四個特征點的描述差異更加顯著。
2.2 大規模圖像識別技術
當前,許多基于圖像檢索的場景識別算法,如隨機樹、BOF等,都存在著計算量大、內存消耗大的問題,對此,系統在對大規模圖像識別算法進行選擇時,引入了VLAD算法,能夠在一定程度上解決內存占用問題,以Gravity-SURF對圖像特征進行描述,也可以實現對于相似圖像特征的有效區分,提升場景識別的準確性和可靠性。在系統運行中,識別算法需要首先針對云端圖像數據庫中存在的訓練圖像的Gravity-SURF描述進行提取,做好VLAD編碼處理,得到圖像的VLAD聚合量。在針對圖像進行在線識別時,算法能夠對AR(增強現實技術)上傳的查詢圖像的VLAD聚合向量進行提取,與訓練圖像本身的聚合向量進行對比,通過相似度測量來保證識別結果的準確性。
2.3 視覺跟蹤注冊算法
在自服務器中獲取識別圖像的編號后,MAR系統可以針對圖像進行跟蹤注冊,以完成對三維模型的實時渲染。從確保實時性的層面考慮,可以選擇BRISK算法,構建Gravity-BRISK描述。在實際應用中,算法會對關鍵幀進行訓練,得到特征集,在跟蹤初始化環節,算法能夠獲取相應的實時幀圖像,將其與關鍵幀特征匹配集合結合起來,運用PROSAC算法,可以取種其中存在的誤匹配點。為了提升跟蹤注冊算法的實時性和魯棒性,可以利用金字塔L-K光流跟蹤的方式,完成對于特征點的準確匹配。
在光流跟蹤階段,如果攝像機本身的運動速度過快,則由估算得到了特征點坐標會存在較大的誤差,算法會自動將這些特征點剔除來保證良好的效果。同樣,當攝像機本身的角度不合理、出現遮擋或者光照變化時,系統同樣會剔除相應的特征點,這樣必然會導致特征點數量的減少,影響跟蹤的穩定性。針對這個問題,需要做好系統設定,當跟蹤點的數量小于一定數值時,系統初始化,然后重新進行特征點匹配。
2.4 三維渲染
在場景中,以Unity3D渲染引擎進行三維模型的繪制,以實現虛擬場景與現實場景的融合顯示。不過,考慮到Unity3D渲染引擎與攝像機使用的均為左手坐標系,本身提到的攝像機坐標系和由跟蹤注冊算法定義的世界坐標系為右手坐標系,需要進行坐標系的轉換工作。這里在右手坐標系中,選擇特征點,坐標為Pwr(x,y,z)、Pcr(x,y,z),對應的左手坐標系特征點坐標為Pwl(x,y,z)以及Pcl(x,y,z),坐標轉換關系為:
Pcr=RrPwr+Tr,Pcl=RlPwl+Tl
Pcl=APcr,Pwl=APwr
其中,Rr、Rl表示旋轉矩陣,Tr、Tl表示平移矩陣,A=diag(1,-1,1)。結合上述公式,經計算,可以得到Unity3D渲染引擎中攝像機的旋轉矩陣和平移矩陣,有
RUnity3D=Rl-1
TUnity3D=-Rl-1Tl
其中,Rl=ARrA,Tl=ATr。
3 結語
經測試,本文提出的算法可以滿足系統對于實時性和精度等方面的要求,而且基于云端的增強現實系統可以在多個領域中得到應用,能夠發揮出良好的效果。
參考文獻
[1]呂強,黃成,劉明.移動云計算——移動增強現實技術和服務[J].中興通訊技術,2015(02):25-29.
[2]申威.基于圖像識別的增強現實系統的實現[D].北京郵電大學,2013.
[3]嚴雷,楊曉剛,郭鴻飛,陳靖.結合圖像識別的移動增強現實系統設計與應用[J].中國圖象圖形學報,2016,21(02):184-191.
作者簡介
吳振宇(1980-),男,浙江省義烏市人。大學學歷。現為浙江交通技師學院講師。研究方向為計算機教學研究。
作者單位
浙江交通技師學院 浙江省金華市 321015
猜你喜歡
人間(2016年24期)2016-11-23 18:43:17
儷人·教師版(2016年15期)2016-11-22 04:48:32
儷人·教師版(2016年15期)2016-11-22 03:21:11
財經界·學術版(2016年19期)2016-11-16 14:43:32
中小企業管理與科技·上旬刊(2016年10期)2016-11-15 08:34:59
法制博覽(2016年11期)2016-11-14 10:40:23
戲劇之家(2016年20期)2016-11-09 22:15:06
文藝生活·中旬刊(2016年10期)2016-11-04 05:24:30
職業(2016年10期)2016-10-20 22:21:12
現代經濟信息(2016年19期)2016-10-20 17:01:12