船舶電力永磁同步推進(jìn)電機(jī)空間電壓矢量DTC
2017-04-02 03:22:02秦俊峰白洪芬顏澤鋅齊運(yùn)永
中國(guó)航海 2017年4期
關(guān)鍵詞:船舶
秦俊峰, 白洪芬, 顏澤鋅, 齊運(yùn)永
(1.欽州學(xué)院 海運(yùn)學(xué)院,廣西 欽州 535000; 2.大連海事大學(xué) 船船電氣工程學(xué)院,遼寧 大連 116026)
電力推進(jìn)船舶由推進(jìn)電動(dòng)機(jī)取代傳統(tǒng)的柴油機(jī)來驅(qū)動(dòng)螺旋槳轉(zhuǎn)動(dòng),不僅具有良好的經(jīng)濟(jì)性、操縱性和安全性,而且噪聲低、污染物排放少,具有廣闊的應(yīng)用前景。永磁同步電動(dòng)機(jī)(Permanent Magnet Synchronous Motor,PMSM)具有體積小、效率高和可靠性好等優(yōu)點(diǎn),在電力推進(jìn)船舶中得到廣泛應(yīng)用。[1]
船舶電力推進(jìn)系統(tǒng)雖然比較復(fù)雜,但經(jīng)過一定的設(shè)計(jì)簡(jiǎn)化之后,可保證簡(jiǎn)化系統(tǒng)的仿真結(jié)果與實(shí)際模型的結(jié)果十分接近[2],因此對(duì)船舶電力推進(jìn)系統(tǒng)進(jìn)行的研究較多,其中推進(jìn)電機(jī)的類型及其控制方式的選擇是船舶電力推進(jìn)的關(guān)鍵技術(shù)之一。目前電力推進(jìn)船上采用的推進(jìn)電機(jī)主要是直流電機(jī)、異步電機(jī)和同步電機(jī)等,而直接轉(zhuǎn)矩控制(Direct Torque Control,DTC)和矢量控制(Vector Control,VC)是主要的電機(jī)控制策略。[3-7]很多文獻(xiàn)[8]只是簡(jiǎn)要分析電力推進(jìn)系統(tǒng),重點(diǎn)對(duì)推進(jìn)電機(jī)的性能進(jìn)行分析,未考慮推進(jìn)電機(jī)與螺旋槳負(fù)載的特性匹配;也有文獻(xiàn)[9-10]側(cè)重于螺旋槳負(fù)載的特性,對(duì)不同工況下螺旋槳的動(dòng)態(tài)過程進(jìn)行仿真研究,但未考慮船舶推進(jìn)電機(jī)對(duì)螺旋槳負(fù)載的帶動(dòng)情況。
相較于矢量控制,直接轉(zhuǎn)矩控制不僅可省去坐標(biāo)變換,還能得到良好的轉(zhuǎn)矩響應(yīng)速度和較高的轉(zhuǎn)矩控制精度,但采用Bang-Bang離散兩點(diǎn)的滯環(huán)控制會(huì)產(chǎn)生較大的電流、磁鏈和轉(zhuǎn)矩脈動(dòng),且低速性能不佳。[11]因此,考慮采用基于空間矢量調(diào)制(Space Vector Modulation,SVM)的直接轉(zhuǎn)矩控制算法,通過控制逆變器的開關(guān)狀態(tài)來控制電壓矢量,實(shí)現(xiàn)對(duì)定子磁鏈幅值及相位的實(shí)時(shí)控制,最終達(dá)到直接控制電機(jī)轉(zhuǎn)速的目的。該系統(tǒng)結(jié)構(gòu)簡(jiǎn)單、響應(yīng)速度快、系統(tǒng)魯棒性強(qiáng)[12],更適用于船舶這種需快速響應(yīng)的大慣量運(yùn)動(dòng)系統(tǒng)。
本文在分析電力推進(jìn)船舶系統(tǒng)基本結(jié)構(gòu)及數(shù)學(xué)模型的基礎(chǔ)上,討論基于空間電壓矢量的直接轉(zhuǎn)矩控制策略的基本原理,通過仿真驗(yàn)證船舶的額定負(fù)載啟動(dòng)性能、轉(zhuǎn)速轉(zhuǎn)矩突變及低速性能,并通過試驗(yàn)驗(yàn)證所提出的直接轉(zhuǎn)矩控制策略的正確性和可行性。
1 船舶電力推進(jìn)系統(tǒng)PMSM數(shù)學(xué)模型
船舶電力推進(jìn)系統(tǒng)由推進(jìn)電動(dòng)機(jī)、推進(jìn)電機(jī)逆變器、船舶推進(jìn)器、螺旋槳和控制裝置等構(gòu)成。[13]船舶運(yùn)行時(shí),推進(jìn)電機(jī)直接驅(qū)動(dòng)螺旋槳轉(zhuǎn)動(dòng);螺旋槳轉(zhuǎn)動(dòng)時(shí)在水中產(chǎn)生向前的推力,通過槳軸和推力軸承等作用于船體,推動(dòng)船舶運(yùn)動(dòng)。此外,海浪、海風(fēng)等海洋環(huán)境的變化會(huì)使船舶阻力發(fā)生變化,進(jìn)而引起螺旋槳負(fù)載轉(zhuǎn)矩發(fā)生變化,最終導(dǎo)致推進(jìn)電機(jī)的特性發(fā)生變化。[14]
由文獻(xiàn)[15]得到船舶螺旋槳模型見圖1。
在電力推進(jìn)船舶中,由推進(jìn)電機(jī)與螺旋槳的相互關(guān)系可知推進(jìn)的動(dòng)力方程[15]為
Jn=Qe-Qp-Qf
(1)
式(1)中:J為轉(zhuǎn)動(dòng)慣量;Qe為電磁轉(zhuǎn)矩;Qf為摩擦轉(zhuǎn)矩;Qp為推進(jìn)轉(zhuǎn)矩。由式(1)可知,船速主要由推進(jìn)電機(jī)轉(zhuǎn)速n決定。
2 船用永磁同步電機(jī)SVM-DTC控制基本原理
基于SVM的永磁同步電機(jī)直接轉(zhuǎn)矩控制系統(tǒng)框圖見圖2。與傳統(tǒng)的DTC相比,該系統(tǒng)添加有轉(zhuǎn)矩PI調(diào)節(jié)器和參考電壓矢量計(jì)算單元,采用SVM單元控制逆變器的工作,對(duì)電機(jī)參數(shù)的依賴度小,更便于調(diào)節(jié)控制。
2.1 SVM控制
電機(jī)的直接轉(zhuǎn)矩控制系統(tǒng)是根據(jù)轉(zhuǎn)矩誤差、磁鏈誤差及磁鏈位置來確定逆變器的開關(guān)信號(hào)的。本文選用電壓型逆變器(見圖3),UDC為直流供電電壓。
根據(jù)逆變器的工作原理,若設(shè)逆變器上橋臂導(dǎo)通時(shí)為狀態(tài)“1”,下橋臂導(dǎo)通時(shí)為狀態(tài)“0”,則三相逆變器的開關(guān)共有8種狀態(tài)組合,所形成的電壓矢量分布見圖4。表1為定子磁鏈扇區(qū)劃分與磁鏈空間角度θ的關(guān)系,角度θ由arctan(Ψsβ/Ψsα)決定。
與矢量控制相比,直接轉(zhuǎn)矩控制無需確定轉(zhuǎn)子的準(zhǔn)確位置。根據(jù)電壓矢量的控制位置將定子空間劃分為6個(gè)扇區(qū)(如圖4所示),在進(jìn)行實(shí)時(shí)控制時(shí),僅確定定子磁鏈所處的扇區(qū)即可結(jié)合其他控制輸入信號(hào)推算出合適的控制參考電壓矢量,完成系統(tǒng)控制。參考電壓可在αβ坐標(biāo)系內(nèi)生成。
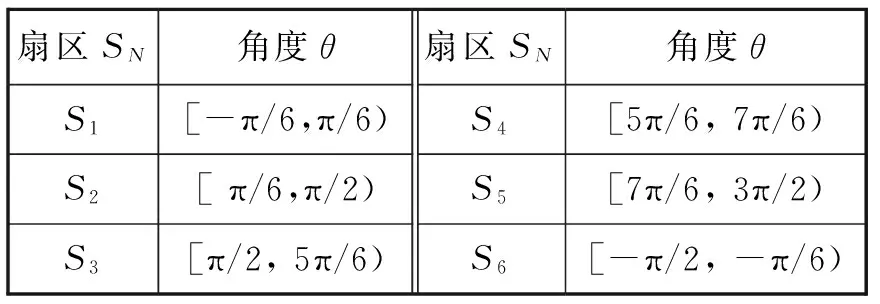
表1 定子磁鏈扇區(qū)與磁鏈空間角度的關(guān)系
(2)
空間電壓矢量調(diào)制SVM模塊采用SVPWM技術(shù),根據(jù)參考電壓的值判斷出參考電壓矢量所在的扇區(qū),由參考電壓矢量所在扇區(qū)相鄰的2個(gè)有效電壓空間矢量和零電壓矢量合成期望的參考電壓空間矢量,替換傳統(tǒng)的直接轉(zhuǎn)矩控制中的電壓矢量開關(guān)表,進(jìn)而實(shí)現(xiàn)對(duì)轉(zhuǎn)矩和磁鏈的控制,使電機(jī)內(nèi)部形成圓形旋轉(zhuǎn)磁場(chǎng)。
2.2 定子磁鏈
若忽略定子電阻壓降的影響,定子合成電壓與合成磁鏈的空間矢量關(guān)系[16]可近似表示為
(3)
式(3)中:Rs為定子電阻;us和is分別為合成定子電壓矢量及電流矢量。由式(3)可知,電機(jī)定子磁鏈?zhǔn)噶颗c定子電壓矢量存在近似的積分關(guān)系,在空間上定子磁鏈?zhǔn)噶砍岸ㄗ与妷菏噶?0°。
圖5為參考電壓空間矢量與磁鏈空間矢量的位置關(guān)系,其中:Ψs和Ψr分別為定子磁鏈及轉(zhuǎn)子磁鏈;Ψsref為定子磁鏈的參考值,即定子磁鏈的給定值;δ為轉(zhuǎn)矩角;θs和θr分別為定子磁鏈及轉(zhuǎn)子磁鏈與α軸的夾角;ΔΨ和Δδ分別為參考電壓矢量作用ΔT時(shí)間之后的定子磁鏈增量及轉(zhuǎn)矩角增量;usref為參考電壓。
由圖5可知αβ坐標(biāo)系下的定子磁鏈與參考磁鏈之間的相互關(guān)系為
(4)
結(jié)合轉(zhuǎn)矩調(diào)節(jié)器控制,定子電壓在α軸和β軸上的電壓參考值可表示為
(5)
2.3 轉(zhuǎn)矩計(jì)算
在僅考慮基波磁動(dòng)勢(shì)的情況下,PMSM的電磁轉(zhuǎn)矩可表示為
(6)
3 系統(tǒng)仿真模型的建立及結(jié)果分析
為驗(yàn)證船機(jī)槳的性能匹配及基于SVM-DTC策略的可行性,在MATLAB/Simulink中搭建電力推進(jìn)船舶仿真系統(tǒng)。電機(jī)的仿真參數(shù)見表2。
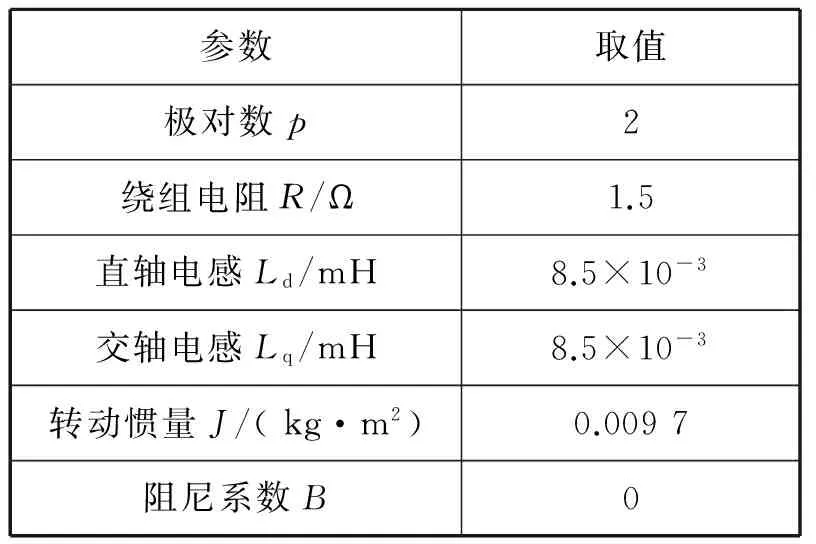
表2 電機(jī)的仿真參數(shù)
仿真時(shí),滯環(huán)寬度取0.01,磁鏈初值設(shè)為1.5 Wb,SVM采樣周期為T=0.000 1 s。
1)給定負(fù)載10 N·m啟動(dòng),給定額定轉(zhuǎn)速200 r/min,穩(wěn)定運(yùn)行;t=0.2 s時(shí)突減速至100 r/min;t=0.4 s時(shí)突加速至200 r/min;t=0.6 s時(shí)突反轉(zhuǎn)至-200 r/min,仿真波形見圖6。
帶載啟動(dòng)時(shí),電機(jī)從零轉(zhuǎn)速上升到給定轉(zhuǎn)速所需時(shí)間約為0.03 s;到達(dá)穩(wěn)態(tài)之后,電磁轉(zhuǎn)矩為給定負(fù)載10 N·m。在恒定負(fù)載下,轉(zhuǎn)速突降和突增時(shí)
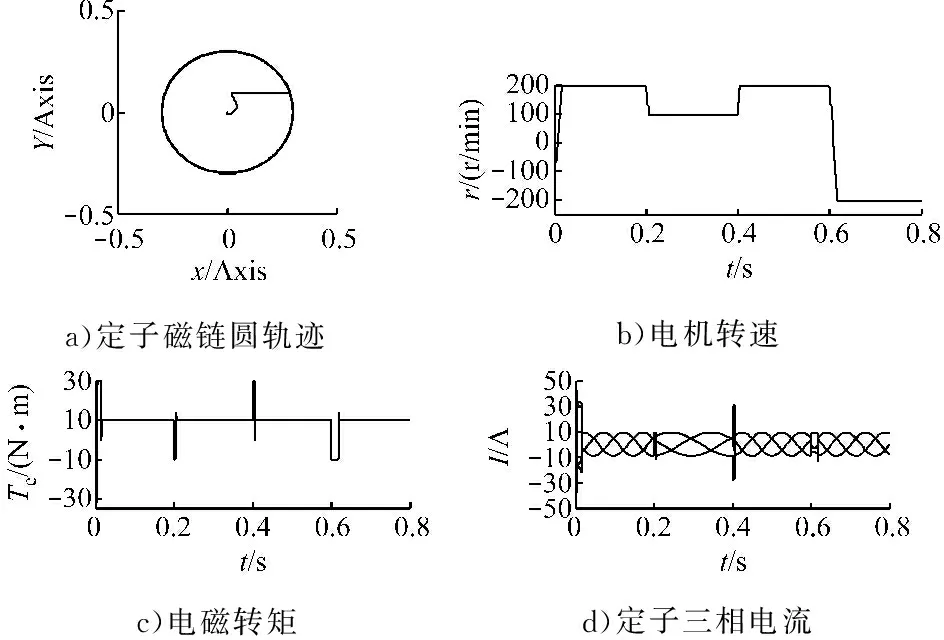
a)定子磁鏈圓軌跡b)電機(jī)轉(zhuǎn)速c)電磁轉(zhuǎn)矩d)定子三相電流
圖6 帶載啟動(dòng)及速度突變的仿真曲線
所需時(shí)間約為0.01 s,從轉(zhuǎn)速發(fā)生反轉(zhuǎn)到給定速度約需0.02 s;同時(shí),電磁轉(zhuǎn)矩和電流在經(jīng)過短時(shí)間波動(dòng)之后重新穩(wěn)定于初始值,說明直接轉(zhuǎn)矩控制具有很強(qiáng)的動(dòng)態(tài)響應(yīng)能力。
2)低速性能仿真,給定轉(zhuǎn)速n=100 r/min啟動(dòng),穩(wěn)定運(yùn)行至0.2 s突然減速至60 r/min;t=0.4 s時(shí)突然減速至40 r/min;t=0.6 s時(shí)突然減速至20 r/min。相應(yīng)的仿真波形見圖7。

a)定子磁鏈圓軌跡b)電機(jī)轉(zhuǎn)速c)電磁轉(zhuǎn)矩d)定子三相電流
圖7 低速的仿真曲線
由圖7可知,該系統(tǒng)具有良好的低速運(yùn)轉(zhuǎn)性能,且響應(yīng)速度很快。
4 試驗(yàn)驗(yàn)證
為進(jìn)一步驗(yàn)證提出的SVM-DTC控制策略的正確性,利用實(shí)驗(yàn)室永磁同步電機(jī),通過DSP編程,模擬電機(jī)直接轉(zhuǎn)矩控制。圖8為試驗(yàn)用三相永磁同步電機(jī)及硬件控制電路,其中:永磁同步電機(jī)的參數(shù)與表2中的參數(shù)相同;控制電路包括電流及電壓檢測(cè)電路和驅(qū)動(dòng)電路。
在試驗(yàn)中,電機(jī)轉(zhuǎn)速給定為200 r/min,磁鏈給定值為0.6 Wb,給定轉(zhuǎn)矩為0.25 N·m。采用基于空間電壓矢量的直接轉(zhuǎn)矩控制策略,所得試驗(yàn)結(jié)果見圖9。
由圖9a)可知:電流波形具有良好的正弦度,符合直接轉(zhuǎn)矩控制的要求。由圖9b)可知:實(shí)際轉(zhuǎn)速能達(dá)到給定轉(zhuǎn)速200 r/min;由于試驗(yàn)過程中會(huì)受到硬件電路、環(huán)境等因素的影響,因此實(shí)際轉(zhuǎn)速會(huì)有一定的波動(dòng);轉(zhuǎn)速脈動(dòng)約為10%,能一直跟蹤給定轉(zhuǎn)速,因此該控制策略是正確可行的。由圖9c)可知:磁鏈幅值一直維持在給定值0.6 Wb附近,磁鏈幅值脈動(dòng)約為4.2%,完全符合DTC對(duì)定子磁鏈幅值控制的要求。由圖9d)可知:電機(jī)的輸出轉(zhuǎn)矩基本在0.25 N·m附近波動(dòng),轉(zhuǎn)矩脈動(dòng)約為150%,與直接轉(zhuǎn)矩控制理論相符。由試驗(yàn)測(cè)得的波形可知,基于空間電壓矢量的直接轉(zhuǎn)矩控制策略能很好地控制電機(jī)運(yùn)行,轉(zhuǎn)矩脈動(dòng)、磁鏈脈動(dòng)均可控制在理論值范圍內(nèi)。
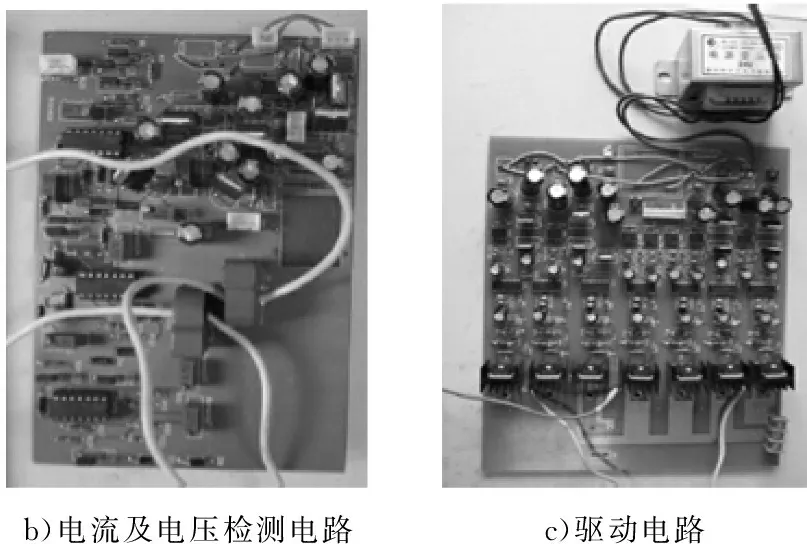
b)電流及電壓檢測(cè)電路c)驅(qū)動(dòng)電路
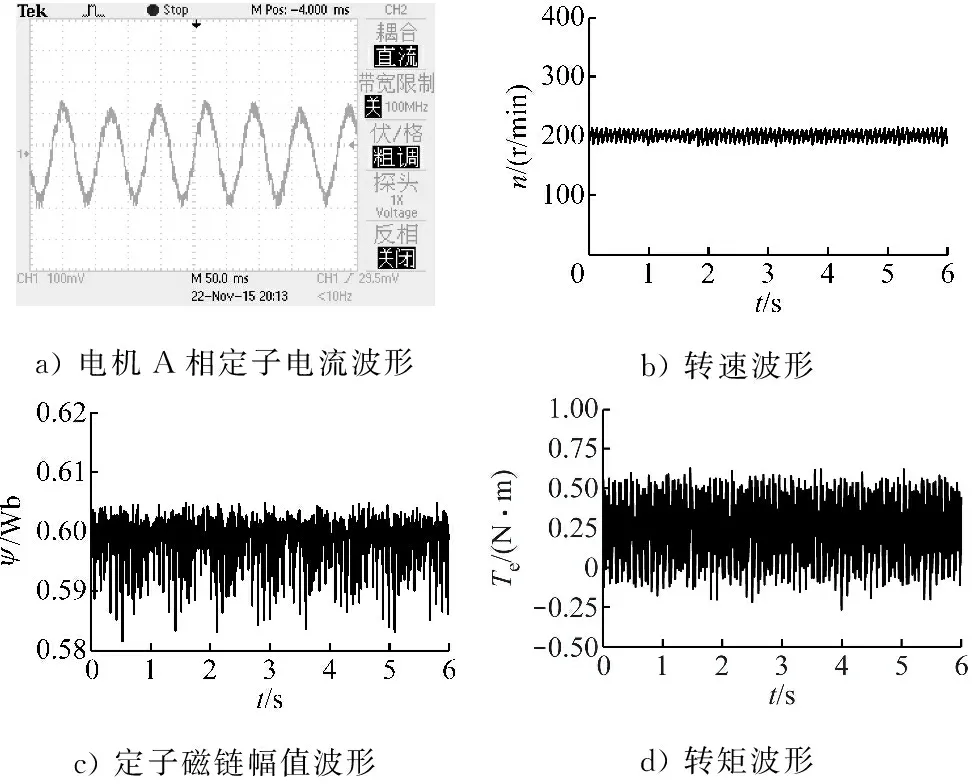
圖8 永磁同步電機(jī)控制系統(tǒng)試驗(yàn)平臺(tái)
圖9 試驗(yàn)波形
5 結(jié)束語
本文在分析船舶電力永磁同步推進(jìn)電機(jī)數(shù)學(xué)模型的基礎(chǔ)上,對(duì)基于空間矢量調(diào)制的直接轉(zhuǎn)矩控制算法進(jìn)行分析。通過仿真, 對(duì)基于SVM的直接轉(zhuǎn)矩控制策略進(jìn)行驗(yàn)證。仿真結(jié)果表明:船用永磁同步推進(jìn)電機(jī)動(dòng)態(tài)轉(zhuǎn)矩的響應(yīng)時(shí)間很短,推進(jìn)電機(jī)的響應(yīng)速度快且平穩(wěn),在很短的時(shí)間內(nèi)便能穩(wěn)定達(dá)到給定轉(zhuǎn)速,在轉(zhuǎn)速和轉(zhuǎn)矩突變的情況下仍能快速響應(yīng),系統(tǒng)具有良好的動(dòng)態(tài)響應(yīng)能力和抗干擾能力。通過試驗(yàn)波形可進(jìn)一步驗(yàn)證所提直接轉(zhuǎn)矩控制策略的正確性。因此,基于SVM的直接轉(zhuǎn)矩控制算法適用于船舶電力推進(jìn)系統(tǒng),能滿足對(duì)船用大功率永磁同步電機(jī)推進(jìn)系統(tǒng)動(dòng)態(tài)響應(yīng)時(shí)間的要求。
[1] 白洪芬,朱景偉,秦俊峰. 改進(jìn)滑模觀測(cè)器在船舶電力推進(jìn) PMSM 無位置控制中的應(yīng)用[J].中國(guó)航海,2015,38(4):22-25.
[2] 楊明國(guó).全電力船舶的電力推進(jìn)系統(tǒng)建模與仿真[J].船電技術(shù),2014, 34(10):19-22.
[3] 鄭仁求,俞萬能,陳景峰.太陽能游覽船舶電力推進(jìn)系統(tǒng)仿真[J].集美大學(xué)學(xué)報(bào)(自然科學(xué)版),2014,19(2):122-126.
[4] 郭昊昊,劉彥呈,任俊杰.電力推進(jìn)船舶中永磁電機(jī)直接轉(zhuǎn)矩控制[J].電機(jī)與控制應(yīng)用,2011,38(11):30-33.
[5] 李彥,唐智星. 基于三電平SVM技術(shù)的船舶電力推進(jìn)DTC研究[J].艦船科學(xué)技術(shù),2013,35(12):32-36.
[6] 申喜,唐穎,魏文軒,等.基于Simulink的船舶電力系統(tǒng)的仿真[J].艦船電子工程,2013,33(9):91-95.
[7] 馬靜怡,魏海峰,劉維亭.船舶電力推進(jìn)PMSM DTC的空間電壓矢量選擇研究[J].中外船舶科技,2014(3):25-27.
[8] 李彥,唐智星.船舶電力推進(jìn)DTC系統(tǒng)低速性能的改善研究[J].科學(xué)技術(shù)與工程,2013,13(7):1773-1778.
[9] 馬繼先,陳源,陸振偉.船舶電力推進(jìn)系統(tǒng)螺旋槳負(fù)載的建模與仿真[J].電子設(shè)計(jì)工程,2014,22(1):56-59.
[10] 秦業(yè)志,阮礽忠. 吊艙式電力推進(jìn)船舶螺旋槳匹配設(shè)計(jì)仿真研究[J].中國(guó)艦船研究,2014,9(6):65-72.
[11] 池飛飛. 船用永磁同步電機(jī)直接轉(zhuǎn)矩控制仿真研究[D].武漢:武漢理工大學(xué),2013.
[12] 曹林柏,趙宏革,張智遠(yuǎn),等.基于十二電壓矢量的電力推進(jìn)PMSM直接轉(zhuǎn)矩控制仿真[J].大連海事大學(xué)學(xué)報(bào),2015,41(1):100-103.
[13] 沈愛弟,褚建新,康偉.內(nèi)河船舶電力推進(jìn)系統(tǒng)設(shè)計(jì)[J].上海海事大學(xué)學(xué)報(bào),2009,30(2):20-24.
[14] 李中兵,張歡仁.基于擴(kuò)展卡爾曼濾波的船舶電力推進(jìn)系統(tǒng)仿真[J].中國(guó)航海,2011,34(4):45-50.
[15] 池波,翁爽. 船舶電力推進(jìn)系統(tǒng)建模與仿真研究[J].船電技術(shù),2014,34(9):76-78.
[16] 趙亮.電力推進(jìn)船舶PMSM直接轉(zhuǎn)矩控制系統(tǒng)的研究[D].大連:大連海事大學(xué),2010.
猜你喜歡
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:08:26
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
機(jī)械工業(yè)標(biāo)準(zhǔn)化與質(zhì)量(2022年6期)2022-08-12 02:07:42
艦船科學(xué)技術(shù)(2022年2期)2022-03-29 01:12:44
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
船舶標(biāo)準(zhǔn)化工程師(2019年4期)2019-07-24 07:21:12
軍工文化(2017年12期)2017-07-17 06:08:06
中國(guó)船檢(2017年3期)2017-05-18 11:33:09
船海工程(2015年4期)2016-01-05 15:53:30
