基于多顏色通道組合的UVI空間農(nóng)作物陰影去除方法
2017-05-11 15:31:29岳有軍趙文佳趙輝王紅君
江蘇農(nóng)業(yè)科學 2017年6期
岳有軍++趙文佳++趙輝++王紅君


摘要:為了有效地解決基于機器視覺的農(nóng)業(yè)機器人在作業(yè)任務中受陰影對農(nóng)作物識別造成的干擾問題,提出一種基于組合的顏色空間,通過較簡單的分割方法可以在組合空間中消除陰影。該方法首先將RGB顏色空間下的圖像轉(zhuǎn)換到LAB、YUV和HSI中,獲得圖像在每個顏色空間中的分量;然后利用直方圖、熵值、均方誤差和峰值信噪比分析各顏色通道特性,選擇合適的顏色通道進行組合。對組合顏色空間進行仿真數(shù)據(jù)分析,篩選出適合于農(nóng)田環(huán)境下陰影去除的UVI空間。通過與包含陰影的不同顏色空間中的圖像進行對比試驗,說明顏色空間可以經(jīng)較簡單的算法實現(xiàn)圖像中陰影的去除,證明該顏色空間對農(nóng)田環(huán)境下陰影去除的有效性、抗干擾性。
關(guān)鍵詞:顏色空間;陰影去除;熵值;峰值信噪比;直方圖;均方誤差
中圖分類號:TN911.73文獻標志碼:A文章編號:1002-1302(2017)06-0196-05
基于視覺的農(nóng)業(yè)機器人是當前農(nóng)業(yè)機械化、精確化發(fā)展的趨勢,其核心是對采集到的農(nóng)田圖像進行快速、準確的分析。在自然條件下,由于植株相互遮擋以及太陽入射角的影響,復雜的農(nóng)田環(huán)境對采集圖像常常產(chǎn)生很多干擾,陰影是農(nóng)田環(huán)境下目標識別的主要干擾因素,使得農(nóng)田中植株識別、顏色提取和陰影區(qū)雜草去除等作業(yè)任務困難化,從而降低圖像中識別的準確性,同時影響機器人工作效率。因此,有必要對自然狀態(tài)下獲取的圖像進行預處理、陰影檢測并去除圖像中的陰影[1]。
針對環(huán)境中陰影干擾農(nóng)作物識別的難題,國內(nèi)外許多學者都進行了相關(guān)的研究。常見的陰影去除算法有基于某一顏色空間下,在該顏色空間下研究陰影區(qū)與其周圍非陰影區(qū)的特性[1],通過對這些特性進行分析,來達到消除陰影的目的。Finlayson等提出了基于二維積分的陰影去除算法來獲得消除陰影的圖像[2-3],其優(yōu)勢在于很好地保留陰影區(qū)域的細節(jié),有較好的視覺效果,但不足之處在于運算復雜度高,而且造成部分細節(jié)失真,導致人為干擾因素[4]。部分學者通過陰影補償方法,將圖像中獨立陰影區(qū)與周圍的非陰影區(qū)進行區(qū)域匹配,來完成消除陰影[5]。張華南等提出在單一YUV顏色空間下進行陰影檢測與去除,在獲得Y通道強度的情況下采用閉值法尋找陰影區(qū)域,對該區(qū)域光照強度補償,然后返回RGB顏色空間中消除陰影[6]。該方法沒有去除陰影區(qū)的邊緣效應,在目標識別中仍然存在干擾。張杰等認為陰影區(qū)與非陰影區(qū)像素點的RGB值之比是一個常量[7],Barnard等提出了基于顏色比率的陰影去除方法[8-9],該算法雖然在陰影去除上得到一定的效果,但是由于其算法較復雜,在背景紋理復雜的情況下,容易造成識別錯誤。綜合以上幾種不同的方法,可以看出,針對圖像中存在陰影去除問題取得了一定研究成果,但是仍然存在許多不足之處:算法復雜性、實時性差和陰影區(qū)域圖像細節(jié)丟失等缺陷問題,所以有必要對陰影問題加深研究。
對于農(nóng)田中陰影區(qū)域下的農(nóng)作物的識別問題,本研究采用了一種簡單的方法來實現(xiàn)去除陰影。該方法是將單一顏色空間下的圖像轉(zhuǎn)換到多顏色空間中,在不同顏色通道中獲取圖像特性;利用直方圖、熵值、均方誤差和峰值信噪比得到仿真數(shù)據(jù)來分析顏色通道特性,構(gòu)造出適合農(nóng)田場景下的陰影去除的顏色空間,即UVI顏色空間,該空間可以利用簡單的算法來實現(xiàn)較好的去除陰影,實現(xiàn)圖像中對農(nóng)作物的識別目的。
1多顏色空間轉(zhuǎn)換
本研究提出將一幅圖像轉(zhuǎn)換到不同顏色空間,經(jīng)過分析不同通道的特性,對組合圖像進行分析,得到不受陰影干擾的組合顏色空間。該方法選擇RGB、HSI、YUV和L*a*b*顏色空間,將采集到的RGB農(nóng)田環(huán)境圖像轉(zhuǎn)化到其他顏色空間下,通過分析、組合、仿真和檢驗來說明組合空間的去陰影效果。各顏色空間之間的轉(zhuǎn)換如下:
(1)HSI是從人的視覺系統(tǒng)出發(fā),用色調(diào)(H)、色飽和度(S)和亮度(I)來描述色彩[10]。RGB顏色空間轉(zhuǎn)化為HSI顏色空間的算法如下:
(2)L*a*b*顏色空間要比RGB、HSI顏色空間大,說明L*a*b*空間可以包含RGB與HSI所能描述的色彩信息[11]。L*a*b*顏色空間中L*為亮度;a*正表示紅色,負表示綠色;b*正表示黃色,負表示藍色。RGB顏色空間轉(zhuǎn)化為L*a*b*顏色空間的算法如下:
(3)YUV是歐洲電視系統(tǒng)所采用的一種顏色編碼方法,Y表示明亮度,U和V則表示彩色的2個分量,作用是描述影像色彩及飽和度,用于指定像素的顏色[12]。RGB顏色空間轉(zhuǎn)化為YUV顏色空間的算法如下:
2多顏色空間的分析方法
通過顏色空間的轉(zhuǎn)換,得到各顏色通道的分量,為了合理利用顏色通道中包含的信息及縮短圖像分析的時間,保證圖像處理的實時性,利用圖像所包含的有效信息量、像素分布等特點,從圖像的均方誤差、峰值性噪比、灰度圖像熵值和直方圖這4個方面對顏色空間的不同通道進行組合分析,并得到去陰影效果良好的組合空間。
(1)均方誤差(MSE),是權(quán)衡“平均誤差”的一種較方便的方法,用來評價圖像中包含數(shù)據(jù)的變化程度。定義為:
3結(jié)果與分析
3.1多顏色通道的分析結(jié)果
以圖2中RGB原圖為數(shù)據(jù),對原圖進行顏色空間的轉(zhuǎn)換,得到各顏色空間下的分量。通過Matlab 7.0對各顏色通道進行數(shù)據(jù)分析。
在信息論中,熵越小,不確定性就越小,信息量越大。從表1分析各顏色空間所包含熵值大小,判斷各顏色通道所包含的信息量的有效性是合理的,同時結(jié)合HSI空間中I分量與圖像的色彩基本無關(guān)聯(lián)的特點,選取I、a*、b*、U、V 5個顏色通道進行組合。
從圖3至圖10的灰度直方圖分析組合顏色空間:(1)組合顏色空間的直方圖窄而集中于灰度級的中部,說明其全部為低對比度圖像;(2)從圖3至圖8可以看出相同的顏色通道的不同順序組合表現(xiàn)出不同的灰度直方圖,說明其中包含不同的信息。從其背景與前景有很好的峰谷間隙可以說明圖8、圖9和圖10這3個組合顏色空間有較好的可分割性。通過直方圖無法進一步分析出它們顏色空間的其他特點。
從表2分析進一步說明:(1)UVI顏色空間的熵值最小,其包含信息量大,信息越有效;(2)峰值信噪比反應整個圖像的失真程度,峰值信噪比愈大的圖像其質(zhì)量愈高,同樣說明UVI的圖像質(zhì)量較高;(3)均方誤差反映數(shù)據(jù)的變化程度,可以看到UVI顏色空間的變化程度最小,精度高。綜合以上所有的數(shù)據(jù)結(jié)果可以得到UVI組合顏色空間在圖像評價中有較好的特性。
3.2多顏色空間對比結(jié)果
3.2.1對圖2 RGB圖像進行仿真試驗為了進一步說明UVI組合顏色空間對含有陰影的農(nóng)田圖形的有效性, 本研究
通過使用Matlab 7.0編程軟件對包含陰影圖像進行仿真試驗對比。通過對同一幅圖像在不同顏色空間下按照相同的算法流程進行分析,得到不同的分割效果圖,來驗證UVI組合顏色空間在陰影去除中的優(yōu)越性。
通過對常見的顏色空間與UVI組合顏色空間進行圖像分割的仿真對比,得到圖11至圖15的分割圖像,從這些分割圖像中可以很清晰地看到陰影對農(nóng)田中農(nóng)作物識別帶來的干擾問題。圖12可以看到HSI空間各顏色通道的獨立性表現(xiàn)出較好的處理效果,但是仍然受到陰影干擾,不能很好地分割圖像中的目標。從圖15中可以明顯地看到UVI組合顏色空間對圖像中的陰影和噪聲等干擾因素有較好的處理能力,對圖像中農(nóng)作物識別有很大的幫助。
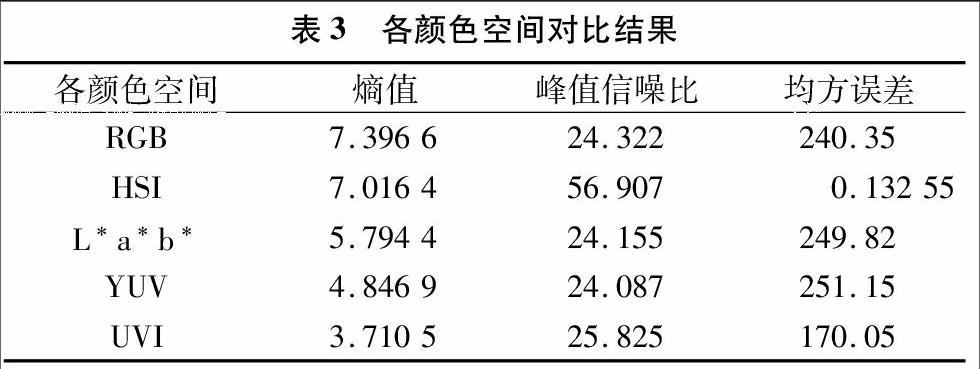
從熵值、峰值信噪比和均方誤差3個方面的數(shù)據(jù)對比各顏色空間的特性(表3),結(jié)果表明:(1)HSI顏色空間在峰值信噪比與均方誤差表現(xiàn)出特殊性但是其熵值較大,所包含的信息量少,說明其包含較多的干擾因素;(2)UVI組合顏色空間的熵值最小,說明其包含信息量在這5個顏色空間中最大,有效信息越多;(3)表3中除HSI外,UVI組合顏色空間的峰值信噪比最大,說明圖像質(zhì)量愈高,對陰影、噪聲的濾除效果最好,圖像分割質(zhì)量越高;(4)均方誤差反映數(shù)據(jù)的變化程度,表中除HSI外,UVI組合顏色空間的均方誤差最小,同樣
說明UVI組合空間的穩(wěn)定性。
3.2.2對深度陰影進行檢驗性仿真試驗為了進一步說明組合顏色空間對圖像中陰影的去除有效性,進行了深度陰影圖像的分割仿真試驗。
圖16是RGB空間下深度陰影的農(nóng)田作物圖像,由于該圖中陰影較之前圖像有很大加深,圖像中的目標識別難度也相應增加。該圖像經(jīng)過顏色空間的轉(zhuǎn)換得到UVI空間,在該顏色空間下對圖像進行處理得到了圖17,通過對其分析可以看出本研究方法對深度陰影同樣有很好的去除作用,說明UVI空間對圖像中的陰影進行了較好地去除,可以較好地識別圖像中的農(nóng)作物。
4結(jié)論
本研究通過對4個顏色空間的12個顏色通道進行熵值分析,選取了I、U、V、a*和b* 5個顏色通道進行顏色空間的組合,對組合的顏色空間進行分析可得:(1)將U、V和b* 3個顏色通道組合,當其組合的順序不同,表現(xiàn)出不同的灰度直方圖和熵值,說明其包含的圖像信息不同。(2)通過對UVa*、UVb*和UVI 3個不同顏色組合空間進行灰度直方圖、熵值、峰值信噪比和均方誤差的仿真數(shù)據(jù)比較,得到特性較好的UVI組合顏色空間。(3)通過對同一幅在不同顏色空間中表達的圖像進行傳統(tǒng)圖像處理的仿真試驗,通過比較不同顏色空間下的分割結(jié)果,證明UVI組合顏色空間在農(nóng)田陰影環(huán)境的去影優(yōu)勢。
參考文獻:
[1]王寧. 圖像的陰影檢測與去除算法研究[D]. 北京:北京交通大學,2008.
[2]Finlayson G D,Hordley S D,Drew M S. Removing shadows from images[M]. Berlin:Springer Heidelberg,2002:823-836.
[3]Finlayson G D,Hordley S D,Lu C,et al. On the removal of shadows from images[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence,2006,28(1):59-68.
[4]劉堂海. 概率學習像素分類法去除農(nóng)作物視頻中陰影[D]. 重慶:西南大學,2009.
[5]楊俊,趙忠明. 基于歸一化RGB色彩模型的陰影處理方法[J]. 光電工程,2007,34(12):92-96.
[6]張華南,馮全,楊梅,等. 基于YCbCr顏色空間的葉片陰影檢測與去除[J]. 計算機系統(tǒng)應用,2015,24(11):262-265.
[7]張杰,丁廣太. 運動人體陰影檢測算法[J]. 計算機工程與設(shè)計,2010,31(7):1519-1522.
[8]Barnard K,F(xiàn)inlayson G D. Shadow identification using colour ratios[C]. Color and Imaging Conference,2000:97-101.
[9]Levine M D,Bhattacharyya J. Removing shadows[J]. Pattern Recognition Letters,2005,26(3):251-265.
[10]馬大江. 基于圖像內(nèi)容的結(jié)構(gòu)相似性質(zhì)量評價研究[D]. 西安:西安科技大學,2013.
[11]王鑫芯. 高動態(tài)范圍與霧天彩色圖像畫質(zhì)增強方法研究[D]. 廈門:廈門大學,2011.
[12]孫承琦. 基于視覺的機器人環(huán)境感知系統(tǒng)研究[D]. 天津:中國民用航空學院,2004.
[13]李連勝,陳晚華. 基于MATLAB的數(shù)字圖像質(zhì)量評價[J]. 湖南科技學院學報,2005,26(5):176-177.
[14]周浩宇. 基于生物視覺模型的圖形圖像處理方法[D]. 長沙:中南大學,2012.
[15]范瑾. 復雜背景下的對象特征提取[D]. 保定:華北電力大學,2007.何玲,陳長喜,許曉華. 基于物聯(lián)網(wǎng)的生豬屠宰監(jiān)管系統(tǒng)關(guān)鍵技術(shù)研究[J]. 江蘇農(nóng)業(yè)科學,2017,45(6):201-204.
doi:10.15889/j.issn.1002-1302.2017.06.052
