基于新型變速趨近律的永磁同步電機滑模控制
2017-06-05 14:19:11李中琴
電機與控制應用 2017年5期
李中琴
(新鄉學院 機電工程學院,河南 新鄉 453003)
基于新型變速趨近律的永磁同步電機滑模控制
李中琴
(新鄉學院 機電工程學院,河南 新鄉 453003)
為了改善永磁同步電機(PMSM)調速系統的動態品質,提出了一種基于變速趨近律方法的PMSM滑模速度控制策略。為了提高傳統指數趨近律的收斂速度和消除系統抖陣現象的影響,在傳統指數趨近律的基礎上提出了一種新型變速趨近律方法,并應用該方法設計了一種PMSM調速系統的滑模速度控制器。通過仿真和試驗結果對比分析,證明該算法不僅改善了系統的魯棒性能,同時改善了系統的動態響應速度。
永磁同步電機; PI控制; 變速趨近律; 滑模控制
0 引 言
目前,蓄電池電機車仍然是全國各煤礦使用的主要運輸設備,且驅動裝置多采用直流電機。但直流電機存在電刷損害率高、維護成本高等缺點,已成為制約煤礦現代化的重要因素。永磁同步電機(Permanent Magnet Synchronous Motor,PMSM)由于具有結構簡單、體積小、效率高和功率密度高等諸多優點,被廣泛用于電力機車、空調壓縮機及其他通用機電設備[1-2]。但是,PMSM是一個典型的復雜非線性系統,當速度控制器采用傳統的PI控制式,雖然在一定程度上能滿足控制性能的需要,當電機長時間運行或受到外界擾動的影響時,電機的參數都會發生一定的變化,傳統的PI控制并不能獲得較好的控制性能。
為了進一步提高PMSM調速系統的控制性能,隨著現代控制技術的不斷發展,一些先進的控制算法逐步被應用于礦用PMSM調速系統。特別是滑模控制作為一類特殊的非線性控制,由于其魯棒性強和動態響應速度快等諸多優點,在一定程度上得到了廣泛應用[3-6]。目前,滑模控制器的設計普遍采用指數趨近律方法,雖具有良好的控制性能,但對于一個指定的系統而言,指數趨近律的參數一般都是固定的,并不具有自調節功能。為了解決上述問題,本文首先設計了一種系統的狀態變量可根據距離平衡點的遠近而自適應調節參數的變速指數趨近律方法,并將此方法應用到PMSM調速系統的設計。最后仿真和試驗結果驗證了該算法的可行性和有效性,提高了系統的動態品質。
1 PMSM的數學模型
建立dq坐標系下表貼式PMSM的數學模型為[7-8]
(1)
式中:ud、uq、id、iq——定子電壓和電流;Ls、R——定子電感和電阻;p——電機的極對數;ψf——永磁體的磁鏈;ω——機械角速度;TL——負載轉矩;J——轉動慣量。
當采用控制策略id=0時,表貼式PMSM矢量控制具有較好的控制效果。此時式(1)則可變為如下的數學模型:
(2)
定義系統的狀態變量:
(3)
式中:ωref——電機的參考轉速,并假定ωref存在二階導數。
根據式(2)和式(3)可知:
(4)
由于電機在實際運行過程中會出現電機參數的變化。此時,式(4)可表示為
(5)
式中: Δa、Δb、Δc——對應項的參數不確定項。
假設g(t)為系統總的不確定項,表達式為
(6)
將式(6)和式(5)代入式(3),可得系統的數學模型:
(7)
2 基于趨近律方法的滑模控制器設計
2. 1 新型趨近律方法
目前,常用的指數趨近律方法為

(8)
在指數趨近律方法中,為保證快速趨近的同時削弱抖振,應在增大μ值的同時減小k值。該方法雖然可以通過減小k、增大μ加速趨近過程,并大大削弱了抖振,但等速項ksgn(s)的存在使系統并不能從理論上消除抖振。
為了進一步提高趨近律的趨近速度,本文提出一種變指數趨近律方法,即:
(9)
為了說明文中所提趨近律方法的優越性,在使用相同參數的條件下,得到了如圖1所示的仿真結果。從圖1可看出,系統的狀態變量從初始值到達平衡點的過程中,相比其他兩種算法,文中提出趨近律方法的收斂速度具有明顯的優勢,且系統的抖振現象也得到了抑制。
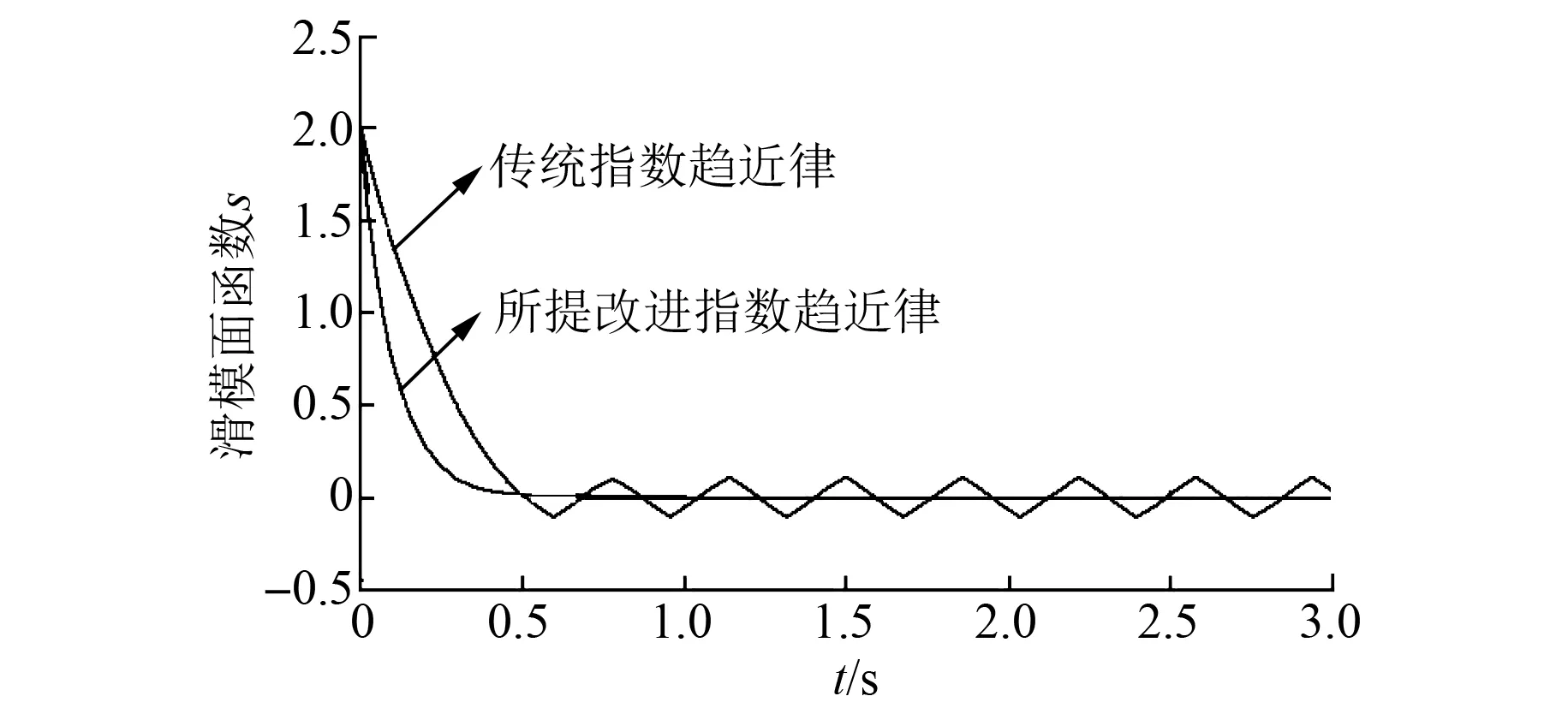
圖1 兩種趨近律方法的性能比較
2. 2 滑模變結構速度控制器設計
定義滑模面函數為
(10)
式中:c——設計參數,c>0。
對于滑模控制器,通常包括等效控制ueq和切換控制uvs,即
(11)
求解等效控制ueq,忽略總的不確定量的影響,令g(t)=0即可求得。切換控制uvs的主要作用就是抵消外界擾動的影響。采用文中的新型趨近律方法,即可得到滑模控制器的表達式,即
(12)
為了證明系統的穩定性,定義Lyapunov函數為
(13)
對Lyapunov函數求導,并將控制器代入,可得
(14)

(15)
從式(15)可以看出,由于積分器的作用,一方面調高了系統的收斂速度,另一方面削弱了系統的抖振現象。
3 仿真和試驗結果分析
采用如圖2所示的PMSM矢量控制技術驗證上述控制算法的可行性和有效性。其中,速度控制器采用上述滑模控制;dq軸的電流控制器采用傳統的PI控制。
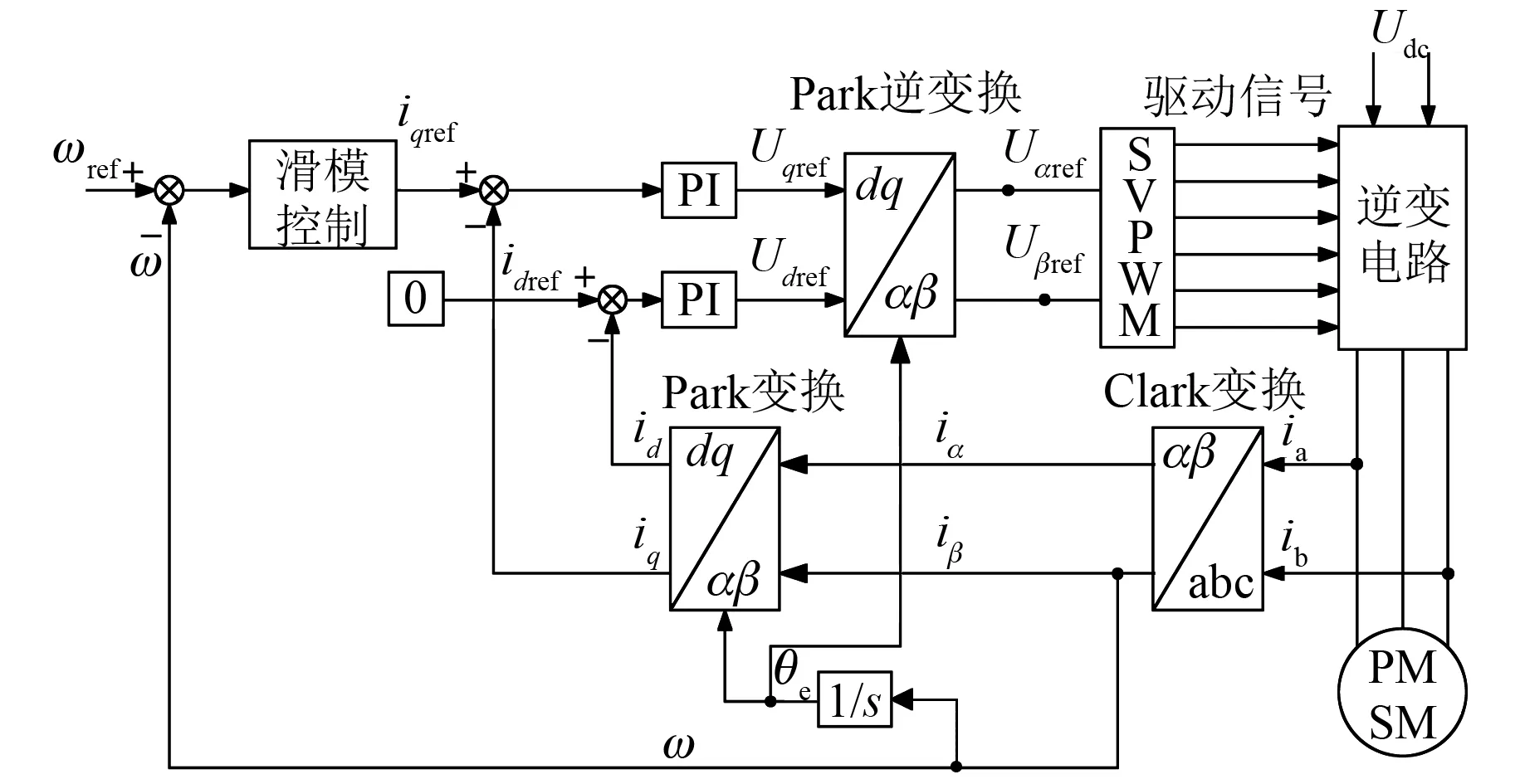
圖2 PMSM調速系統控制框圖
3. 1 仿真結果分析
在MATLAB/Simulink環境下搭建系統的仿真模型,電機參數設置如下:定子電阻為R=2.46 Ω,定子電感Ls=6.35 mH,永磁體磁鏈ψf=0.175 Wb,轉動慣量J=1.02 kg·m2,摩擦因數B=0.000 1 N·m·s,極對數p=4。
為了便于比較分析,圖3和圖4分別給出了突加負載條件時PI控制和文中所提滑模控制作用下的仿真結果,仿真條件轉速值設定為500 r/min。從圖3、圖4可以發現,在PI控制作用下能夠進入穩態狀態,且電機轉速有超調;在文中所提控制算法作用下能夠在更短的調節時間內進入穩態狀態,且電機轉速無超調。可見,相比PI控制,文中所提控制算法具有較快的動態性能。
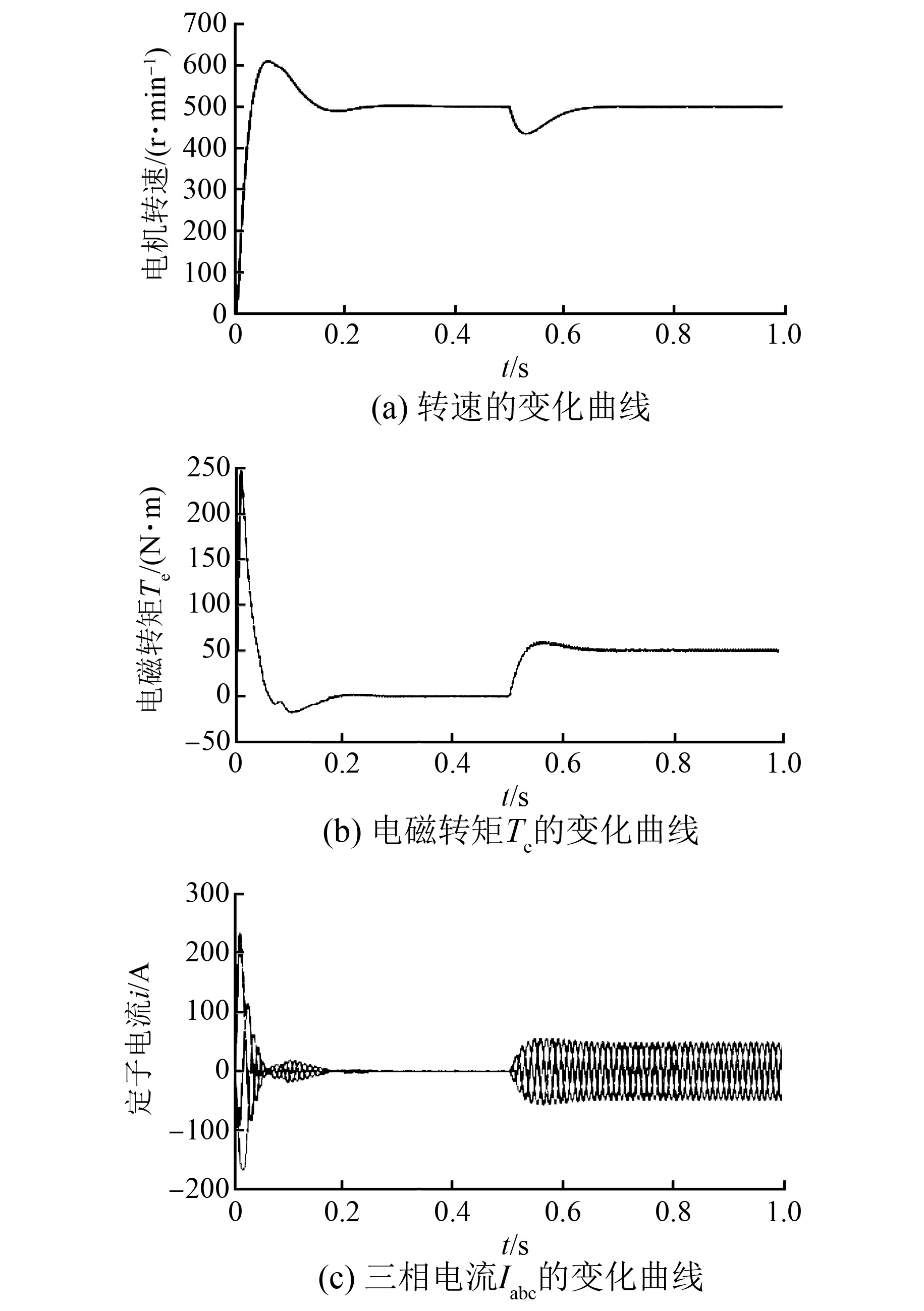
圖3 基于PI速度控制器的仿真結果
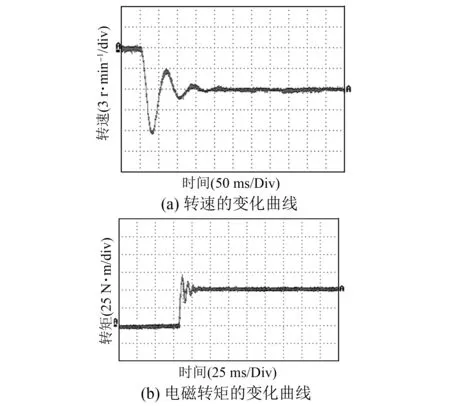
圖5 基于PI速度控制器的試驗結果
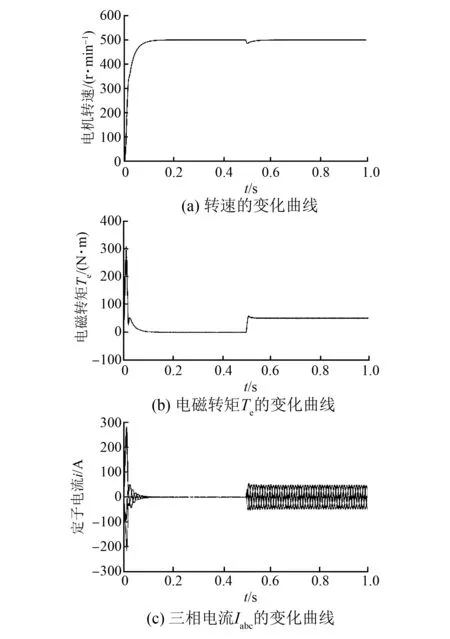
圖4 基于滑模速度控制器的仿真結果圖
3. 2 試驗結果分析
為了進一步驗證算法的可行性和有效性,圖5和圖6分別給出了同樣采用圖2所示的控制框圖的試驗結果,其中參考轉速與仿真中的參數設定相同,并且是系統穩態運行后突加負載時的變化曲線。其中,圖5(a)和圖6(a)分別為兩種控制策略下轉速的變化曲線,而轉矩的變化曲線如圖5(b)和圖6(b)所示。
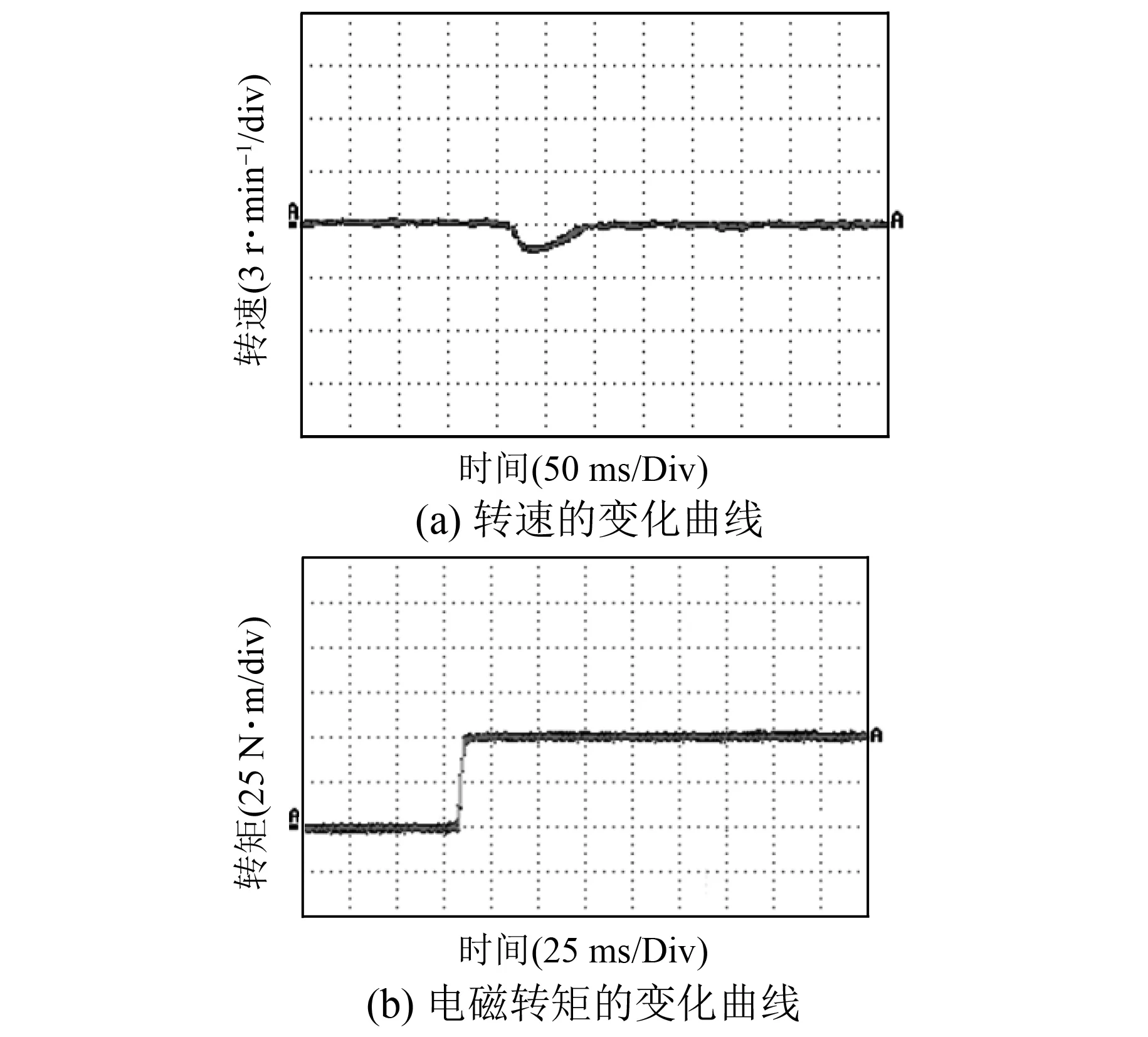
圖6 基于滑模速度控制器的試驗結果
從以上試驗結果可發現,相比采用PI速度控制器時,采用文中所提滑模速度控制策略時,系統轉速、轉矩具有較好的動態響應速度,且轉速波動小,抗外界擾動能力強,從而驗證了算法的可行性和有效性。
4 結 語
為了提高PMSM調速系統的動態調速性能,本文首先給出了包含參數不確定性的數學模型。為了提高傳統指數趨近的控制性能,文中設計了一種具有自適應調節控制參數能力的變速率趨近律方法,并將此方法應用到PMSM速度控制器的設計中。通過與傳統PI控制進行比較,仿真和試驗結果驗證了算法具有較好的動態性能,提高了系統的運動品質。
[1] 楊書生,鐘宜生.永磁同步電機轉速伺服系統魯棒控制器設計[J].中國電機工程學報,2009,29(3): 84-89.
[2] GHAFARI K A R, FAIZ J, YAZDANPANAH M J. Integration of non-linearH∞and sliding mode control techniques for motion control of a permanent magnet synchronous motor[J]. IET Electric Power Applications, 2010, 4(4): 267-280.
[3] 錢榮榮,駱敏舟,趙江海,等.永磁同步電動機新型自適應滑模控制[J].控制理論與應用,2013,30(13): 1414-1421.
[4] 常雪劍,劉凌,崔榮鑫.永磁同步電機非奇異快速終端可變邊界層滑模控制[J].西安交通大學學報,2015,49(6): 53-59.
[5] 盧濤, 于海生,山炳強,等.永磁同步電機伺服系統的自適應滑模最大轉矩/電流控制[J].控制理論與應用,2015,32(2): 251-255.
[6] 張曉光,趙克,孫力,等.永磁同步電動機滑模變結構調速系統新型趨近率控制[J].中國電機工程學報,2011,31(24): 77-82.
[7] 李政,胡廣大,崔家瑞,等.永磁同步電機調速系統的積分型滑模變結構控制[J].中國電機工程學報,2014,34(3): 431-437.
[8] 汪海波,周波,方斯琛.永磁同步電機調速系統的滑模控制[J].電工技術學報,2009,24(9): 71-77.
Sliding Mode Control for Permanent Magnet Synchronous Motor Based on Variable-Rate Reaching Law Method
LIZhongqin
(Mechanical and Electrical Engineering College, Xinxiang University, Xinxiang 453003, China)
In order to improve the control performance of permanent magnet synchronous motor (PMSM) drive system, a siding mode speed control strategy based on an improved reaching law method was proposed. To shorten the reaching time and weaken system chattering of the conventional exponential reaching law, a novel reaching law based on traditional reaching law was proposed, and the method was applied to PMSM drive system. Compared with traditional PI controller, simulation and experiment results showed that the proposed controller improve the system robustness and dynamic performance.
permanent magnet synchronous motor (PMSM); PI control; variable-rate reaching law; sliding mode control
河南省科技攻關項目(162102210068)
李中琴(1979—),女,碩士研究生,研究方向為自動控制技術與應用。
TM 351
A
1673-6540(2017)05- 0022- 05
2016 -10 -21
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
