永磁直驅風電機組的機側多整流器并聯運行控制研究
2017-06-05 14:19:11呂志香
電機與控制應用 2017年5期
呂志香
(揚州工業職業技術學院,江蘇 揚州 225127)
永磁直驅風電機組的機側多整流器并聯運行控制研究
呂志香
(揚州工業職業技術學院,江蘇 揚州 225127)
永磁直驅風電機組的容量通常達到了兆瓦級,采用并聯型結構是主要的擴容方式。傳統的風電變流器機側整流器具有獨立的直流母線,雖具有控制簡單的優點,但也存在成本高、體積增加等問題。針對這個問題,提出了一種新型的永磁直驅風電機組機側多整流器共直流母線并聯運行控制策略。該控制策略的控制目的是抑制共直流母線的整流器模塊之間由于不同步造成的環流,因此首先對具有公共直流母線的多整流器運行的直流環路和零序電流動態進行了建模和分析,設計了獨立的電流控制器,并通過同步載波移相配合生成了多簇脈沖調制信號給不同的整流器模塊,但相互的控制器使用了同一個轉子位置觀測器,從而實現了每個模塊的電流同步和均衡,并匹配了最優的總發電機轉矩。最后,為了驗證控制策略的有效性,基于1.5MW的永磁直驅風電機組試驗平臺進行了試驗研究。試驗結果表明,在新型控制策略下,變流器機側多整流器模塊能正常運行,并具有較優的性能。
風力發電; 永磁同步發電機; 并聯運行; 零序電流; 公共直流母線
0 引 言
在各種新能源發電系統中,風力發電是最有前景的新能源利用形式[1-3]。基于永磁同步發電機(Permanent Magnet Synchronous Generator, PMSG)的風電機組由于復雜度的降低和可靠性的提高,得到了商業化利用,占據了相當大的市場份額[4-6]。
PMSG接入到電網使用的是全功率變流器,雖然功率半導體器件的發展迅速,單個器件的額定容量在不斷上升,但是受限于技術和經濟成本,變流器的最大容量是有限的。因此,對于兆瓦級低壓永磁直驅風電機組,采用并聯型結構的變流器進行擴容是較好的解決方案[7-8]。變流器采用并聯模式具有可靠性高、效率高、電網側輸出諧波含量低等優點[9]。對于采用并聯結構的背靠背全功率變流器可以分為兩類,一類采用獨立直流母線,還有一類采用公共直流母線。前者雖具有控制簡單的優點,但也存在成本高、體積增加的問題[10]。若采用第二種結構并聯,則由于數字控制器使用了離散空間矢量脈寬調制(Space Vector Pulse Width Modulation, SVPWM),以及開關特性和不同變流器輸出阻抗的差異,即使采用同步脈沖控制,也會在并聯的變流器之間產生環流,將對系統產生不利,例如增加器件損耗,降低設備可靠性,增加故障檢測難度等。因此,文獻[11]提出了一種方法將兩個并聯的三相變流器當成六相變流器進行控制,從而避免零序環流能,但是必須將兩個變流器當成一個整體進行脈寬調制,失去了調制靈活性。文獻[12]提出了一種不使用零矢量的調制策略,避免了離散型SVPWM使用時造成的并聯變流器之間的相互影響,但是并沒有完全避免零序擾動,輸出阻抗不匹配仍然可以導致零序電流,即使不使用零矢量。文獻[13]提出了一種新型的控制方法,引入了一個新的控制變量來調整零矢量的持續時間,而不是消除零矢量,這可以有效地抑制零序環流,但其推導的零序分量數學模型是平均值模型,并不能預測零序電流峰值,而且平均電流模式控制容易產生較大的紋波。
針對這個問題,本文提出了一種永磁直驅風電機組的機側多整流器并聯運行控制方案。推導并分析了零序環流的數學模型,揭示了并聯多個變換器的零序環流的機理。設計了一種改進的SVPWM并聯調制策略來抑制零序環流,并對每個功率支路實現了獨立的電流調節。最后通過試驗對控制器的性能進行了驗證。
1 環流控制器設計
1. 1 永磁直驅風電機組和風電變流器
并聯型永磁直驅風電機組結構圖如圖1所示。槳葉和機械系統構成前端能量輸入,然后PMSG通過并聯型結構的全功率背靠背變流器接入到電網[14-15]。這種拓撲結構下的風電變流器機側和網側的控制是獨立的。

圖1 并聯型永磁直驅風電機組
圖1中Lg1和Lg2為機側接入電抗;iga1、igb1和igc1以及iga2、igb2和igc2為機側兩個并聯整流器的輸入電流;udc為直流側電壓;C1和C2為并聯的直流側電容;ila1、ilb1和ilc1以及ila2、ilb2和ilc2為網側兩個并聯逆變器的輸出電流。
1. 2 變流器機側環流表達式
n個并聯運行的三相PWM整流器結構示意圖如圖2所示。圖2中功率器件假設為理想開關,S1ap、S1an、S1bp、S1bn、S1cp和S1cn為1號整流器的功率器件,Snap、Snan、Snbp、Snbn、Sncp和Sncn為n號整流器的功率器件,C為總直流電容,R為總的等效并聯電阻,L1和Ln分別為1號和n號整流器的接入電感,ia1、ib1和ic1以及ian、ibn和icn為并聯的1號和n號整流器輸入電流,ua1、ub1和uc1以及uan、ubn和ucn為并聯的1號和n號整流器輸入電壓,i1p和i1n以及inp和inn為并聯的1號和n號整流器輸出到直流側的電流,usa、usb和usc為發電機等效輸出電動勢,uN為發電機等效輸出電動勢中點電位,ref(0)為參考零電位。
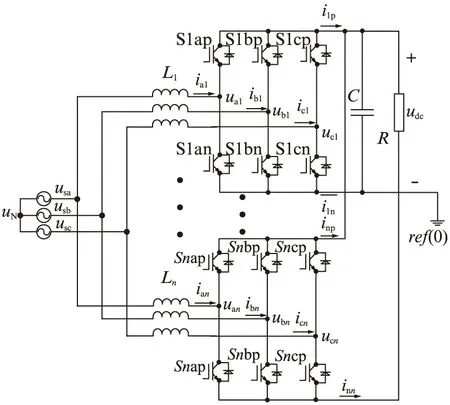
圖2 多個三相PWM整流器并聯結構圖
通過電壓平衡法則,可以對每個并聯整流器單元的A相建立以下方程:
(1)
式中:uNO——中點電位和參考零電位之間的電壓。
定義Zj=Ljd/dt+Rj,j∈{1,2,…,n},那么式(1)可以重新寫為
ikj=-ukj/Zj+(usk+uNO)/Zj
(2)
式中:k——a,b,c相,k∈{a,b,c};ikj——第j個整流器的第k相電流;ukj——第j個整流器的第k相輸入電壓;usk——第k相發電機等效輸出電動勢。
n個整流器并聯后的環流通路如圖3所示。
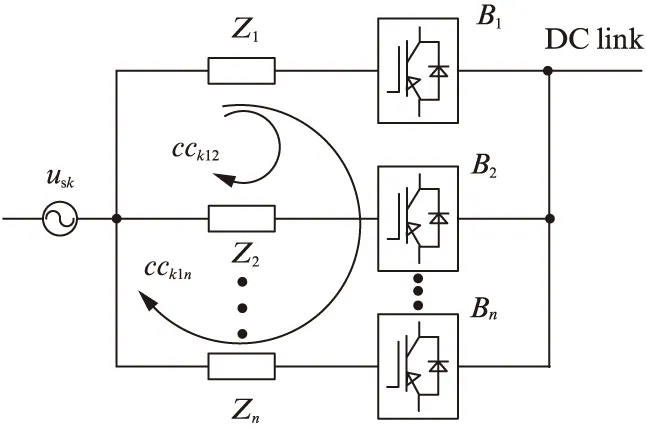
圖3 多個整流器并聯后的環流通路
首先考慮圖中第一條支路B1,cck12代表支路B1和B2之間的環流,cck13代表支路B1和B3之間的環流,以此類推,cck1n代表支路B1和Bn之間的環流。因此,1號變流器的第k相環流cck1是由n個分量組成的,具體如下:
cck1=cck12+cck13+…+cck1n
(3)
可以推導出第j號整流器的第k相環流的表達式,文獻[14]給出了環流的數學定義如下:
(4)
式中:iki,ikj——第i號和第j號的第k相電流。
第j號變流器的環流通用表達式可以推導為
(5)
從式(5)可以看出,輸出直流電壓和三相輸入電壓將對環流產生影響,環流通路上的阻抗對環流幅值也有影響。如果所有環流通路上的阻抗都相等,那么交流三相輸入電壓將對環流的影響降低到最小。如果所有變流器模塊都實現參數一致和完全同步控制,則環流將減低至0。但是,實際上各個模塊環流通路上的阻抗差別較大,因此環流是實際存在的,即使盡量讓控制器同步控制各個模塊。同時功率器件的開關動作也是存在差異的,有限的器件開通或關斷時間不一致也將導致環流。
1. 3 變流器并聯時abc系下的環流數學模型
文獻[11]給出了兩電平三相整流器平均值模型,具體如圖4所示。
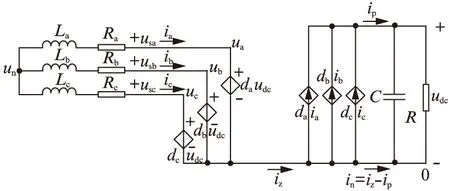
圖4 兩電平三相整流器平均值模型
圖4中La、Lb和Lc,以及Ra、Rb和Rc為發電機等效電感和電阻,da、db和dc為控制輸出的三相等效占空比,ip和in分別為輸入到電容正極和負極電流,iz為受控電壓源輸出電流。在圖4中運用電壓平衡法則和節點電流定律可以推導出以下方程:
(6)
將式(6)寫成矩陣的形式為
(7)
對于具有公共母線的n個并聯的變流器,將可以推導出3n-1個微分方程加上1個代數方程。對環流通路應用電壓平衡法則,可以得到3n- 1個微分方程如下:
(8)
其中k∈{a,b,c},而Rs和Ls分別為PMSG的等效電阻和等效電感。對節點n應用節點電流定律,可以推導出剩下的1個代數方程為
ia1+ib1+ic1+ia2+ib2+ic2+…+
ian+ibn+icn=ia+ib+ic=0
(9)
對式(9)取微分,可得

(10)
假設L1=L2=…=Ln,且R1=R2=…=Rn,那么可以進一步得到狀態空間方程描述如下:
(11)
式中:X=[ia1,ib1,ic1,ia2,ib2,ic2,…,ian,ibn,icn]T——狀態變量;U——輸出變量,具體的表達式為U=[ua1,ub1,uc1,ua2,ub2,uc2,…,uan,ubn,ucn]T;
Y——輸出變量。
狀態矩陣A為
輸入矩陣B為
輸出矩陣C是一個3n×3n的單位矩陣,而I為3×3的單位矩陣,而T為
基于上述狀態空間描述可建立傳遞函數方程:
G(s)=C(sI-A)-1B=

(12)
式(12)中第一部分代表了環流,第二部分代表了從PMSG到變流器的輸入電流。
1. 4 變流器并聯時dq系下的環流數學模型
假設直流電壓udc和電流是連續且只有較小紋波的,那么相電壓ukj=dkjudc,而且相對于電感,每相的電阻值很小,可以忽略,那么可以得到兩個變流器并聯時的狀態空間方程為
(13)


(14)
將式(13)和式(14)從靜止abc三相坐標系轉換到dq同步旋轉坐標系,即可以推導出如下dq坐標系下的方程:
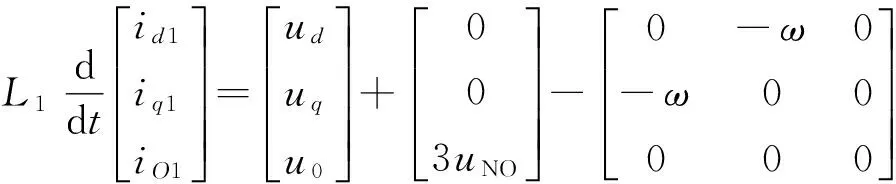
(15)
(16)
(17)
其中:u0=usa+usb+uscd0=da+db+dc
式中:id1、iq1、iO1、id2、iq2、iO2——1號和2號變流器在dq坐標系下的d軸、q軸和O軸電流分量;
ud、uq、u0——dq坐標系下的d軸、q軸和O軸電壓分量;
ω——交流電角頻率;
dd1、dq1、dO1、dd2、dq2、dO2——1號和2號變流器在dq坐標系下的等效占空比。
雙機并聯的三相整流器在dq坐標系下的等效電路如圖5所示。從圖5可以看到零序電流是并聯系統中一個不可忽視的環節。
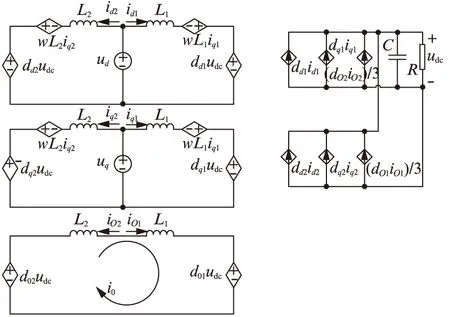
圖5 dq坐標系下三相整流器并聯等效電路
1. 5 零序環流控制策略
根據前述雙機并聯的三相整流器在dq坐標系下的等效電路和零序動態模型,可以設計零序環流控制器如圖6所示。圖6中虛線框中包括了一個改進的SVPWM控制算法。算法具體描述如下: 首先零序電流參考和實際值相減,結果輸出到PI調節器,輸出零序電壓u0。常規d軸電流環和q軸電流環的計算結果為d軸和q軸參考電壓ud和uq,轉換為αβ坐標系下的uα和uβ,進而由常規SVPWM算法生成了調制波。然后,零序輸出電壓通過歸一化后與調制波疊加。最終生成的調制波與載波相比較,輸出控制脈沖。
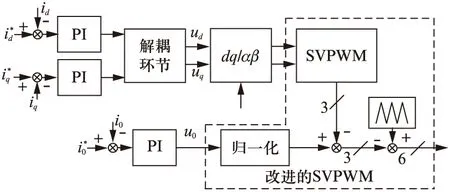
圖6 零序電流控制器
如圖6所示,dq坐標系下三相整流器雙機并聯等效電路中,在O軸等效電路中存在零序環流,并取決于O軸等效占空比dO1和dO2的差異。根據式(15)和式(16),i0的動態方程為

(18)
式(18)中,右邊第二項可以看作是擾動。就抑制i0而言,控制器可以考慮設計為一個PI調節器,輸入是i0,而輸出是u0。開環傳遞函數GOL(s)前向通路包含了一個數學控制延遲環節,具體為
GOL(s)=GPI(s)·GPlant(s)e-sTs=
(19)
式中:e-sTs——控制延遲的數學表達式;Ts——采樣周期。
如果Ts足夠小,延遲可以近似表示為1-sTs,從而閉環傳遞函數可以寫為

(20)
時間乘以絕對誤差的積分被納入控制器的設計。二階系統的特征多項式的最佳系數是由式(21)決定的:
(21)
式中:ωn——系統固有頻率,可以通過定義的阻尼比和穩定時間計算得到。
對比式(20)和式(21),可以得到Kp和Ki:
(22)

(23)
零序環流控制器的帶寬應該設計得盡量寬,從而可以實現對零序電流的較好抑制。對于n臺整流器并聯的情況,零序電流之和等于0,即i01+i02+…+i0n=0。由于零序電流之間相互作用,獨立的零序電流數目為n-1,因此零序電流控制器的數量應該是n-1。
2 風電變流器機側整體控制設計
風電變流器發電機側的整流器模塊并聯拓撲結構如圖1所示。風力發電系統連接到電網后,由于風電場一般距離偏遠和電網容易存在擾動,其可靠性不高導致了維護成本增加。使用并聯拓撲結構風電變流器以后,與單臺變流器相比,具有更高的可靠性,更高的效率,以及較低的電網諧波。
在并聯拓撲結構下,一個變流器單元將在功能上作為主機,其他作為從機,然后在不同單元之間建立起串行通信總線,每個單元都有自己的調制周期計數器,并且在串行通信消息的基礎上互相同步。
以這種方式,調制計數器可以同步工作。載波移相調制技術應用在并聯拓撲結構變流器中具有很大的優勢[10]。當一個模塊停止工作時,主控制器只是改變了相應的載波相位角,并限制了系統的容量,其他模塊依然可以繼續工作,待機單元也可以被激活,并且可以實現全功率運行。變流器機側并聯結構PWM整流器的控制框圖如圖7所示。圖7中PMSG由兩個整流器并聯連接在轉子上,采用了旋轉坐標系下的dq控制,采用d軸沿轉子磁鏈矢量位置定向。在這種方式下,d軸電流保持為零,得到最小電流和最大電磁轉矩。最佳有功功率或轉矩參考設置可根據最大功率跟蹤算法計算得到。兩組PWM信號采用單獨的電流控制器經由載波相移同步產生。轉子位置由無位置傳感器的轉子位置觀測器供給。每個變流器模塊是相互獨立的,獨立得到轉子磁鏈位置。每個模塊的電流是平衡的,同步的,彼此配合產生最佳的總發電機轉矩。這種設置將減少平衡電流時所需要的大阻抗,并支持后續可能的擴容要求。零序電流控制器已被集成到總控制器框圖中,如圖7所示。
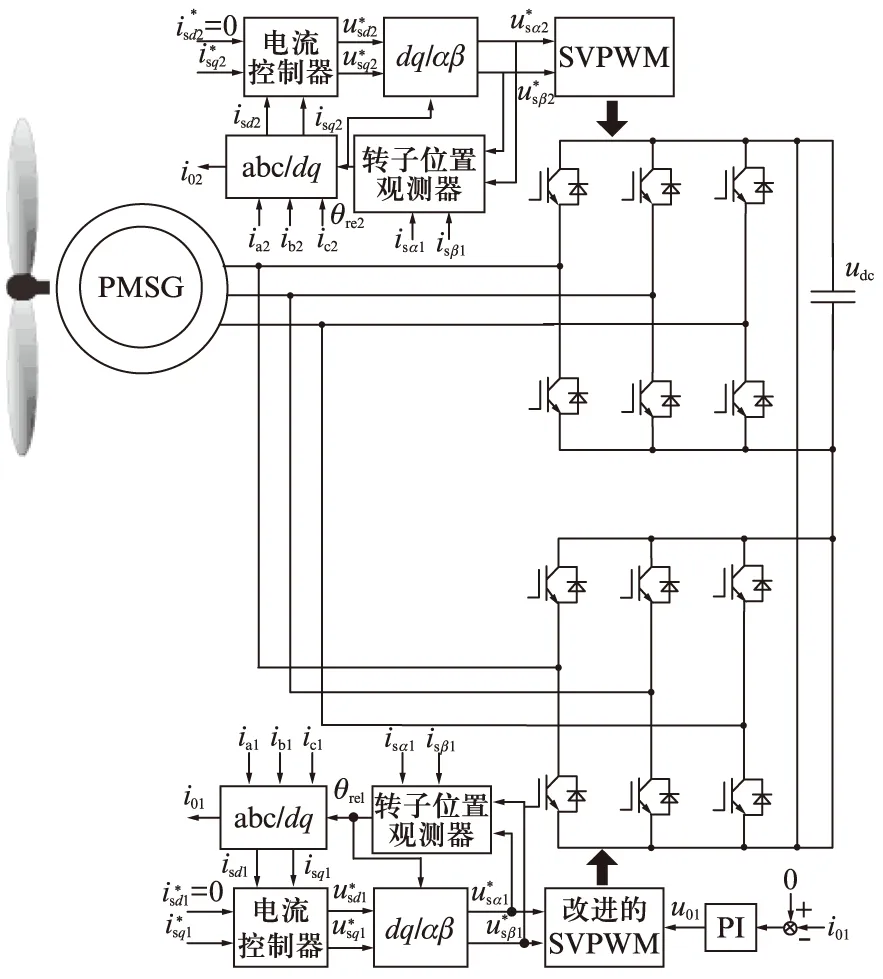
圖7 變流器機側并聯拓撲的控制總體結構
3 試驗驗證
為了驗證所提出的永磁直驅風電機組的機側多整流器并聯運行控制策略的有效性,基于 10kW 的PMSG原理樣機搭建了試驗平臺,對所提出的控制策略進行了試驗研究。樣機的具體參數如表1所示。數字控制器由主流的DSP和FPGA框架構成,前者執行解耦電流調節,零序電流控制和轉子位置估計算法,FPGA實現了一些保護功能。
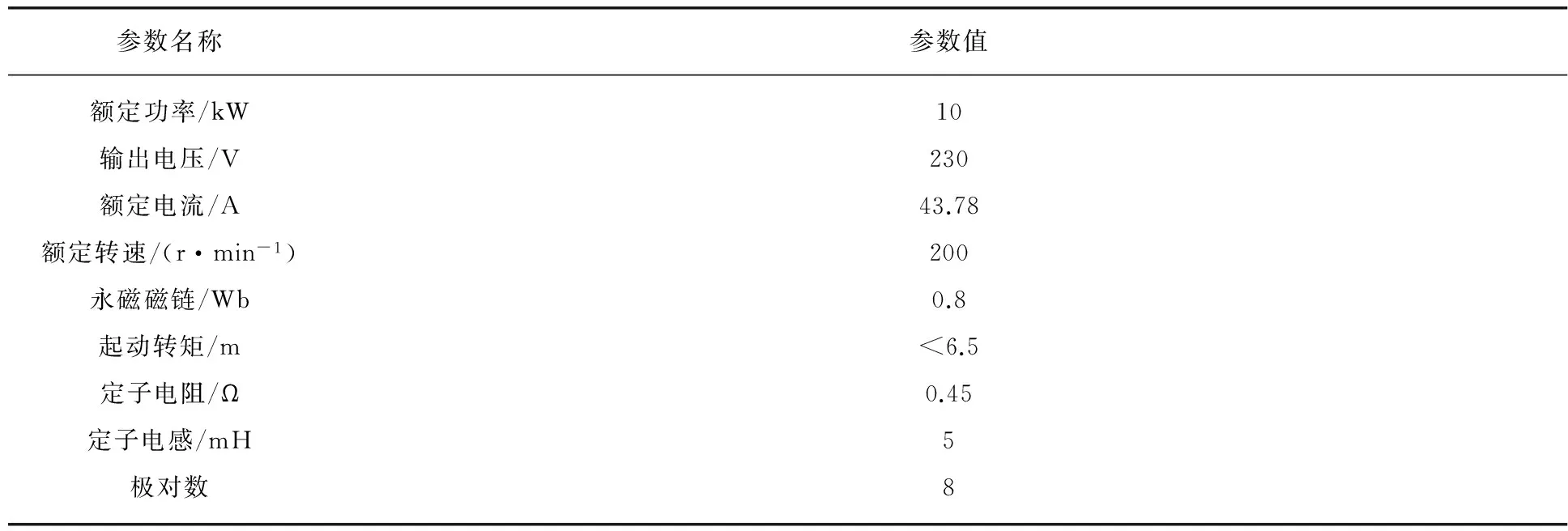
表1 PMSG相關參數
前述已經對并聯控制器進行了描述。利用試驗平臺,對無零序電流控制和有零序電流控制這兩種情況分別進行了測試和記錄。
如圖8所示,零序環流的峰值約6A,而單臺整流器的相電流峰值約為10A,因此環流的比例達到了總電流的30%。同時可以觀察到一個較強的零序相互作用。正是由于環流的存在使得同一相的分支電流波形失真,均流度較差,諧波增加。
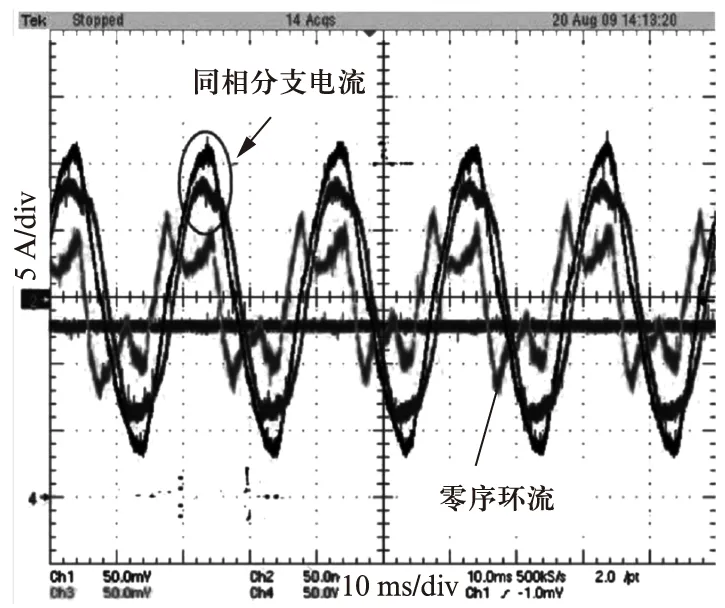
圖8 無零序環流控制時的分支相電流和環流波形
在控制器中增加零序環流控制后,樣機系統在額定10kW運行時的兩臺變流器機側電流波形和直流電壓波形如圖9所示。由圖9可以看出,并聯運行后A相總電流峰值達到40A,分支電流為20A,電流波形質量較高,均流度較好,諧波含量少,直流電壓穩定在470V,波動很小。

圖9 零序環流控制時的額定工況機側電流和直流電壓波形
在控制器中增加零序環流控制后,雙機并聯樣機系統在額定10kW運行時的單臺變流器機側環流和網側環流波形如圖10所示。從圖10可以看出,零序環流得到了抑制,因此均流效果較好;只是高頻電流紋波仍然存在,但經由濾波器得到了衰減,所以顯示機側環流和網側環流最大幅值都限制在5A以內了。
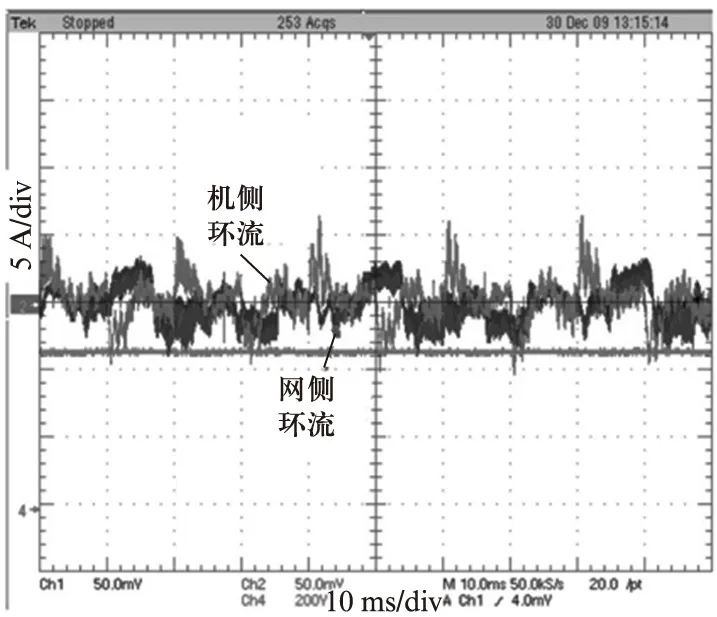
圖10 零序環流控制時的額定工況下機側和網側環流波形
4 結 語
本文對永磁直驅風電機組的機側多整流器并聯運行控制進行了相關研究。現總結主要工作和結論如下:
(1) 推導了多臺整流器并聯運行時的零序環流動態數學模型及其相關表達式,為控制器設計提供了理論依據。
(2) 本文所設計的零序電流控制器能夠很好地對整流器并聯運行時產生的環流進行抑制,并通過了試驗驗證。
(3) 根據本文提供的控制方案,整流器并聯系統不再需要大的阻抗進行均流,因此具有較好的經濟性。
[1] BLAABJERG F, MA K. Future on power electronics for wind turbine systems[J]. IEEE Journal of Emerging and Selected Topics in Power Electronics, 2013,3(1): 139-152.
[2] 張永明,史偉偉.風力發電機低電壓穿越技術發展現狀[J].電機與控制應用,2012,39(7): 6-11.
[3] 肖碩霜,尹忠東.一種并聯風電機組低電壓穿越調控裝置[J].電機與控制應用,2012,39(11): 10-12.
[4] 涂娟,湯寧平.一種新型直驅式風力發電系統控制策略[J].電機與控制應用,2015,42(7): 52-56.
[5] 賈波,張輝.直驅永磁同步風電系統低電壓穿越控制策略[J].電力系統及其自動化學報,2015,27(2): 15-19.
[6] 李和明,董淑惠,王毅,等.永磁直驅風電機組低電壓穿越時的有功和無功協調控制[J].電工技術學報,2013,28(5): 73- 81.
[7] 霍現旭,李國棟,朱曉輝,等.永磁同步風電系統閉環弱磁控制研究[J].電機與控制應用,2016,43(1): 54-59.
[8] 劉波,潘巧波.大型直驅風電機組快速響應控制策略[J].電機與控制應用,2015,42(11): 62- 66.
[9] 王志新,吳杰,徐烈,等.大型海上風電場并網VSC-HVDC變流器關鍵技術[J].中國電機工程學報,2013,33(19): 14-26.
[10] BLAABJERG F, LISERRE M, MA K. Power electronics converters for wind turbine systems[J]. IEEE Transactions on Industry Applications, 2012,48(2): 708-719.
[11] FUKUDA S, MATSUSHITA K. A control method for parallel-connected multiple inverter systems[C]∥IEEE 7th International Conference on Power Electronics, London, U.K., IEEE, 1998: 175-180.
[12] KUN X, LEE C F, BOROYEVICH D, et al. Interleaved PWM with discontinuous space-vector modulation[J]. IEEE Transactions on Power Electronics, 1999,14(5): 906-917.
[13] YE Z, BOROYEVICH D, CHOI Y J, et al. Control of circulating current in two parallel three-phase boost rectifiers[J]. IEEE Transactions on Power Electronics, 2002,17(5): 609-615.
[14] 肖園園,李欣然,張元勝,等.直驅永磁同步風力發電機的等效建模[J].電力系統及其自動化學報,2013,25(1): 12-28.
[15] XU Z, RAHMAN F M. An adaptive sliding stator flux observer for a direct torque controlled IPM synchronous motor drive[J]. IEEE Transactions on Industry Electronics, 2007,54(5): 2398-2406.
Control of Parallel Rectifiers for Direct-Drive Permanent Magnet Wind Power Generator
LüZhixiang
(Yangzhou Polytechnic Institute, Yangzhou 225127, China)
The capacity of the direct driven permanent magnet wind turbine was usually reached megawatt, and the parallel structure was the main solution for expansion. The generator side of the traditional wind power converter was always has an independent DC bus. Although it had the advantages of a simple controller, but the cost would higher and the volume would increase. Aiming at it, a new control schema of parallel rectifiers for a direct drive permanent magnet wind power generator had been proposed. The purpose of the controller was to suppress circulation current caused by asynchronization between the paralleled rectifiers. Therefore, the loop circulation current between the multiple rectifiers had been analyzed, and the dynamic of zero sequence current had been modeled at first. Then, the independent current controllers havd been designed, and it generated the pulse modulation signal to the rectifiers through the synchronous carrier phase shift generator. Each controller used the same rotor position observer, so as to realize the current of each module synchronization and equalization, and the total generator torque optimal matching. In order to verify the performances of the proposed controller, the platform based on 1.5MW wind power system was built, and some experiments had been done. The results showed that the rectifier modules of the converter operators well with the new controller, and the performances of the controller were good.
wind power; permanent magnet synchronous generator(PMSG); parallel operating; zero sequence currents; common DC link
江蘇省揚州市2015重點研發計劃項目(YZ2015084)
呂志香(1979—),女,碩士研究生,研究方向為電力電子與電力傳動和新能源發電。
TM 461
A
1673-6540(2017)05- 0090- 08
2016-07-14
