氣動機械手的PLC控制
2017-06-20 17:40:56鮑小春馬天才
速讀·下旬 2017年4期
鮑小春+馬天才
摘 要:介紹了氣動機械手搬運機構的組成、氣動原理和MOV_B指令的用法,討論了MOV_B指令在機械手搬運過程中的應用。
關鍵詞:氣動機械手;MOV_B指令
1氣動機械手的組成
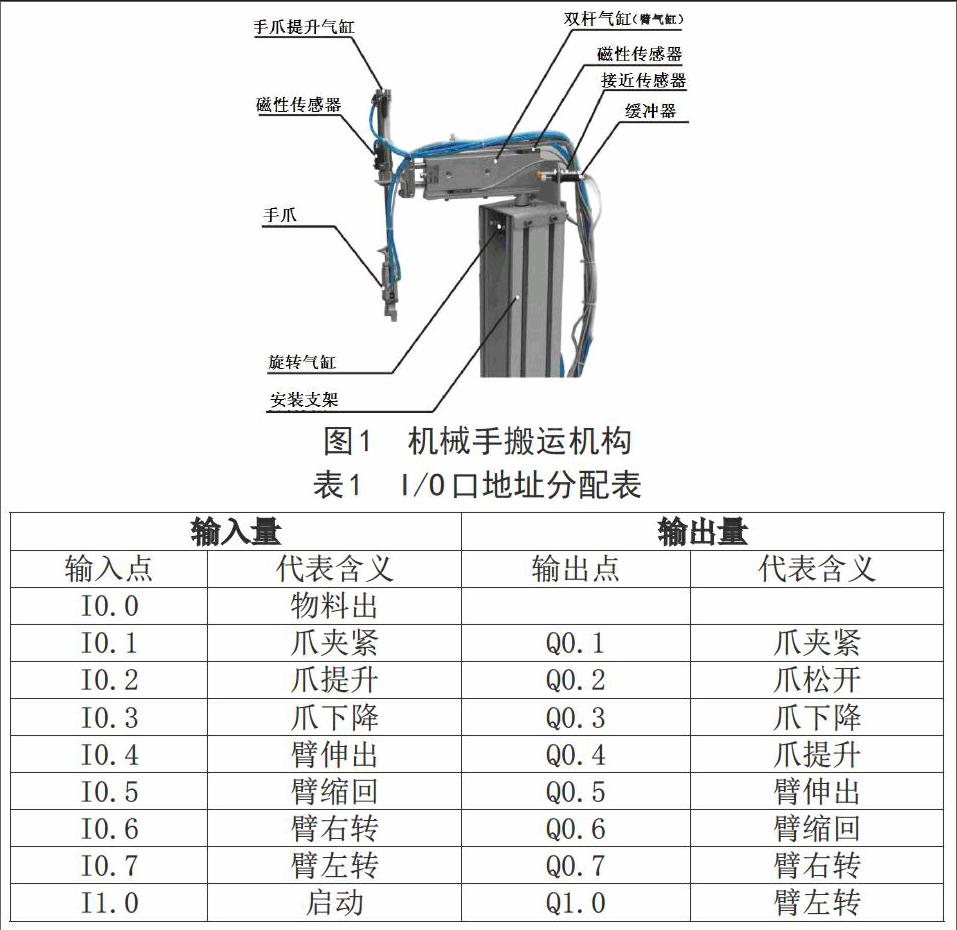
我廠機械采用電控氣閥——氣缸驅動。檢測采用磁性開關、光電開關、接近開關、行程開關等工業上常用的傳感器發出檢測信號。機械手搬運機構如圖1所示。整個搬運機構能完成四個自由度動作:手臂伸縮、手臂旋轉、手爪上下、手爪緊松。手爪提升氣缸:提升氣缸采用雙向電控氣閥控制,氣缸伸出或縮回可任意定位;雙桿氣缸:機械手臂伸出、縮回,由雙向電控氣閥控制;旋轉氣缸:機械手臂的正反轉,由雙向電控氣閥控制;磁性傳感器:檢測手爪提升氣缸處于伸出或縮回位置;手爪:抓取物料由單向電控氣閥控制,當單向電控氣閥得電,手爪夾緊時磁性傳感器有信號輸出,單向電控氣閥斷電,手爪松開;接近傳感器:機械手臂正轉和反轉到位后,接近傳感器信號輸出;緩沖器:旋轉氣缸高速正轉和反轉到位時,起緩沖減速作用。
2氣動機械手氣動原理
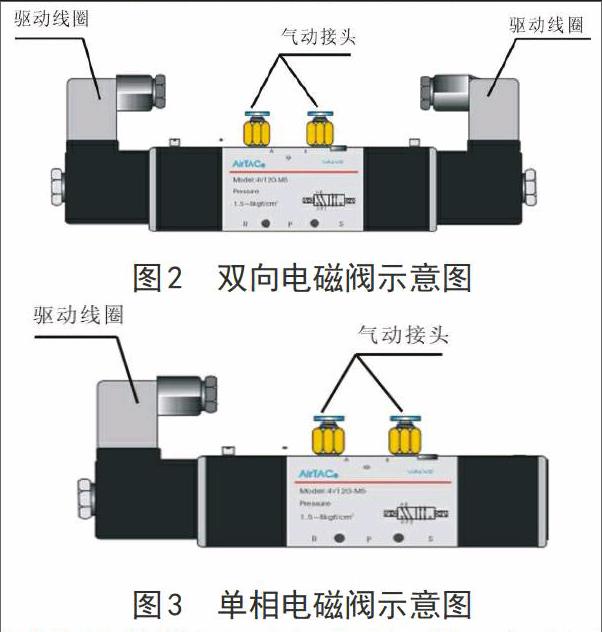
氣動主要分為兩部分:第一部分,氣動執行元件部分有單出桿氣缸、單出雙桿氣缸、旋轉氣缸。第二部分,氣動控制元件部分有單控電磁換向閥、雙控電磁換向閥、磁性限位傳感器。
雙向電控閥用來控制氣缸進氣和出氣,從而實現氣缸的伸出、縮回運動。電控閥內裝的紅色指示燈有正負極性,如果極性接反了也能正常工作,但指示燈不會亮。雙向電磁閥示意圖圖2所示。單向電控閥用來控制氣缸單個方向運動,實現氣缸的伸出、縮回運動。單向電磁閥示意圖圖3所示,與雙向電控閥區別在雙向電控閥初始位置是任意的可以隨意控制兩個位置,而單控閥初始位置是固定的只能控制一個方向。
3控制方案
本控制采用西門子PLC作為控制器,通過用戶程序實現對機械手搬運機構的邏輯控制,可靠實現機械手的啟、停和各種動作。PLC全部采用開關量控制,輸入量包括啟動、停止、送物料出、手爪夾緊點、手爪提升、手爪下降、手臂伸出、手臂縮回、手臂左轉、手臂右轉、緊急停止,共12點;輸出量包括手爪夾緊、手抓松開、手抓下降、手抓提升、手臂伸出、手臂縮回、手臂左轉、手臂右轉,共8點。因此選用S7-200CPU226CN完全能夠滿足要求。I/O口地址分配如表1所示。控制程序指令選擇MOV指令。
3.1MOV指令介紹
MOV指令有MOVB,MOVW,MOVD,MOVR四類,分別是字節傳送、字傳送,雙字傳送、實數傳送。根據表1可知,機械手一個流程總共有12個動作,一個字節的最大存儲數值是255,所以選用字節傳送就能滿足編程要求。
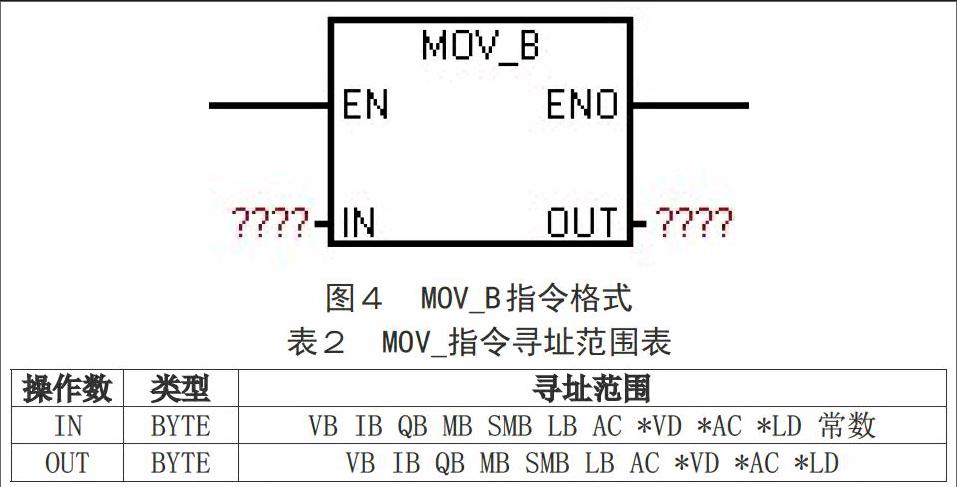
在梯形圖中,字節傳送指令以功能框的形式編程,如圖4所示,指令名稱為MOV_B。當允許輸入EN有效時,將一個無符號的單字節數據IN傳送到0UT中。IN和0UT的尋址范圍如表2所示。
3.2程序編寫
控制程序如圖3所示,程序編寫使用了MOV_B指令,給VB0中存放不同的數值,機械手就有不同的動作,比如VB0=1時,機械手手臂伸出,VB0=2時,機械手手臂下降。SM0.1在上電時執行一次掃描周期,將VB0存儲地址中的值清零,為機械手的正確動作做好準備。當機械手走完一個流程時(即第12個動作走完),對VB0存儲地址中的值清零,為機械手下一流程動作做好準備。
4結束語
氣動機械手搬運機構在工業自動化生產過程中應用非廣泛,其控制方法也很多,有用步進指令控制的、也有寄存器左移指令控制的……,用MOV_B指令控制機械手搬運機構是借鑒了企業的做法。在工廠,工人師傅希望用最簡單的方法解決問題,并且他們習慣將問題順序處理。這種方法在教學中也得到了驗證,學生容易、也樂意接受,并且試驗和現場應用表明,利用PLC傳送指令控制機械手完成各種動作,具有較高的穩定性和準確性。
作者簡介:
鮑小春,男,主要從事于機械檢修與機電一體化設備控制的研究工作。
馬天才,男,長期從事于工業電氣控制和電機控制的研究工作。