基于視覺信息的四軸飛行器位姿估計研究
2017-07-12 09:03:43范大東林林熊芝
軟件導刊 2017年6期
關鍵詞:機器視覺
范大東+林林+熊芝

摘要:提出一種基于已知特征點的單目視覺位姿估計方法。根據攝像機透視投影成像關系,建立四軸飛行器視覺位姿估計模型,設計一種著陸目標圖案,提出著陸目標圖案特征點提取及標記方法。實驗結果表明,該位姿估計算法是有效的。
關鍵詞:機器視覺;四軸飛行器;位姿估計
DOIDOI:10.11907/rjdk.171358
中圖分類號:TP319
文獻標識碼:A 文章編號:1672-7800(2017)006-0120-04
0 引言
視覺導航技術具有設備簡單、信息量大、抗電子對抗和無源性強等特點,其作為自主飛行器的輔助導航技術已經受到業界人士的高度重視,是目前無人飛行器導航技術領域中的研究熱點。機載攝像機是飛行器的“眼睛”,通過它,飛行器可以實現避障、位姿估計以及目標識別等。因此,將計算機視覺運用于飛行器輔助導航具有明顯優勢[1-2]。
基于特征點的視覺導航方法,是近年來視覺導航領域研究較為活躍的內容之一。其基本原理為:將攝像機裝載在飛行器上,并在參考目標上預先設置已知的特征點,通過提取已知特征點對應的圖像坐標,根據攝像機透視投影模型,實時估計出攝像機相對于參考目標的位置姿態。
本文設計了由3個黑色正方形和1個黑色三角形組成的平面著陸目標圖案,以正方形和三角形頂點為圖像特征點,提出了一種基于平面單應性變換的圖形特征點實時提取標記方法,利用提取的特征點圖像坐標及對應的世界坐標,實時估計攝像機的位置參數,將其作為飛行器視覺導航信號。
1 著陸標志物及特征點標記
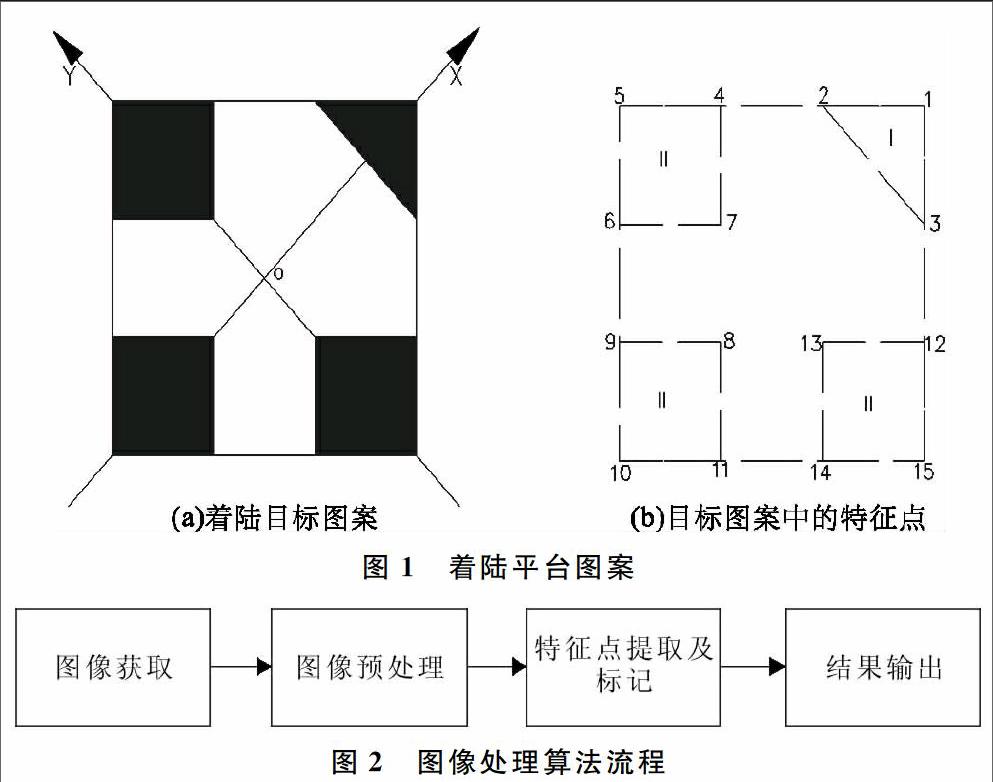
本文設計的著陸圖案如圖1(a)所示。著陸圖案的邊長為60mm,其中小正方形的邊長為20mm,等腰直角三角形的直角邊長為20mm。在著陸圖案中,黑白相間的角點即為設計的特征標記點集。著陸圖案可以分成4個部分,形狀包括兩種類型:I型和II型。如圖1(b)所示,定義著陸目標圖案的中心為世界坐標系原點,類型I的區域中心處于世界坐標系的X軸正半軸,類型II的區域中心依次分布在其余軸線上,采用右手法則來確定Z軸,可以看到各特征點在世界坐標系中的坐標是明確的。
針對所設計的著陸目標圖案,圖像處理的目的是確定標志點的位置,然后提取和標識出這些特征點。本文中的圖像處理算法流程如圖2所示,這里首先使用攝像機獲取圖像,然后對圖像進行預處理,主要包括圖像濾波、閾值分割等,最后檢測與提取特征點,使用標記算法對其進行標記。
主要算法如下:
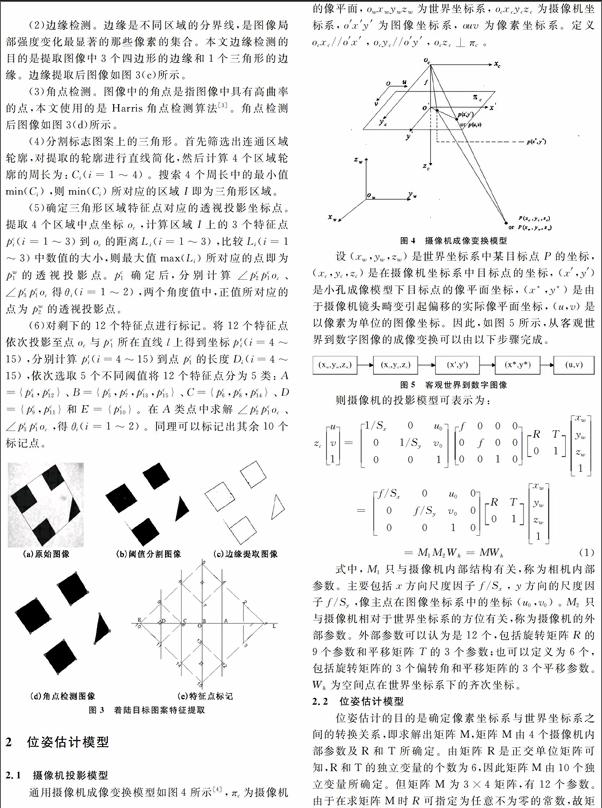
(1)閾值分割。閾值分割是指根據像素的灰度、顏色、紋理等特性按照一定的原則將一副圖像或景物分割成若干個特定的、具有獨特性質的部分或者子集,并提取出感興趣目標的技術和過程。閾值分割后圖像如圖3(b)所示。
(2)邊緣檢測。邊緣是不同區域的分界線,是圖像局部強度變化最顯著的那些像素的集合。本文邊緣檢測的目的是提取圖像中3個四邊形的邊緣和1個三角形的邊緣。邊緣提取后圖像如圖3(c)所示。
(3)角點檢測。圖像中的角點是指圖像中具有高曲率的點,本文使用的是Harris角點檢測算法[3]。角點檢測后圖像如圖3(d)所示。
(4)分割標志圖案上的三角形。首先篩選出連通區域輪廓,對提取的輪廓進行直線簡化,然后計算4個區域輪廓的周長為:Ci(i=1~4)。搜索4個周長中的最小值min(Ci),則min(Ci)所對應的區域I即為三角形區域。
3 實驗
得到特征點的像素坐標系的坐標(u,v)及世界坐標系的坐標(xw,yw,zw)后,根據兩步法標定原理,利用Matlab/GUI工具 [9],得到位姿估計模型GUI界面如圖6所示。
本文采用如下方案來驗證所建立的位姿估計模型的正確性[10],在著陸目標平板上繪制兩個相同的特征圖案,如圖7所示,設定它們的距離分別為100mm、150mm、200mm、250cm和300mm。
將攝像機(攝像機為Prosilica GT2750 CCD工業相機、16mm鏡頭,圖像大小為像素)固定在著陸目標圖案的上方對該著陸目標圖案進行拍照,然后利用上述位姿估計模型解算出相對位置估計測量值,得到表1的測量結果。由表1可知,位置估計誤差在11mm以內,本文建立的位姿估計模型基本滿足位置估計要求。
4 結語
本文以飛行器自主著陸階段為研究對象,根據攝像機透視投影成像關系,建立了飛行器視覺位姿估計模型,設計了一種著陸目標圖案,并對其進行圖像處理、角點提取和特征點標記,利用兩步法攝像機標定原理對攝像機位姿進行了解算,使用Matlab/GUI工具對該算法加以實現,最后利用實驗室現有的條件對其進行了驗證。結果證明,本文提出的圖像處理及相關位姿估計算法具有一定的導航精度。但是由于需要進行大量的圖像處理,耗時較多,還很難滿足飛行器自主著陸階段實時性的要求,因此縮短圖像處理時間將是后續研究的重點。
參考文獻:
[1]SRIKANTH SARIPALLI,JAMES F MONTGOMERY,et al.Vision-based autonomous landing of an unmanned aerial vehicle[C].Proceedings of the 2002 IEEE International Conference on Robotics & Automation,2002: 2799-2804.
[2]COURTNEY S SHARP,OMID SHAKENIA,S SHANKAR SASTRY.A vision system for landing an unmanned aerial vehicle[C].Proceedings of the 2001 IEEE International Conference on Robotics & Automation,2001:1720-1727.
[3]趙文斌,張艷寧.角點檢測技術綜述[J].計算機應用研究,2006,10(1):17-20.
[4]邱力為,宋子善,沈為群.用于無人直升機著艦控制的計算機視覺技術研究[J].航空學報,2003,24(4):351-354.
[5]TSAI R Y.An efficient and accurate camera calibration technique for 3D machine vision[C].In Proc.CVPR,1986:364-374.
[6]趙明.基于圖像的物體尺寸測量算法研究[J].軟件導刊,2016,15(11):48-52.
[7]樊冬雪.四軸飛行器視覺導航系統的設計[J].計算機技術與用,2014,40(8):140.
[8]阮利鋒.小型無人直升機自主著陸視覺導航系統設計及仿真[D].上海:上海交通大學,2009.
[9]周平.MATLAB圖像處理與圖形用戶界面設計[M].北京:清華大學出版社,2013.
[10]王山山,王丹.Matlab下視頻處理系統設計與實現[J].軟件導刊,2016,15(12):71-73.
(責任編輯:孫 娟)
猜你喜歡
軟件導刊(2016年11期)2016-12-22 21:52:17
電腦知識與技術(2016年28期)2016-12-21 12:13:14
科技視界(2016年26期)2016-12-17 17:31:58
科技視界(2016年25期)2016-11-25 19:53:52
科技視界(2016年25期)2016-11-25 09:27:34
科教導刊(2016年25期)2016-11-15 17:53:37
軟件工程(2016年8期)2016-10-25 15:55:22
科技視界(2016年20期)2016-09-29 11:11:40
科技視界(2016年6期)2016-07-12 09:12:40
科技視界(2016年15期)2016-06-30 19:03:30
