一種改進的相機靈敏度測試系統
2017-07-31 17:13:00范新坤佟首峰宋延嵩張藝藍
中國測試 2017年6期
關鍵詞:實驗
范新坤,張 磊,佟首峰,宋延嵩,江 倫,張藝藍
(長春理工大學空地激光通信技術國防重點學科實驗室,吉林 長春 130022)
一種改進的相機靈敏度測試系統
范新坤,張 磊,佟首峰,宋延嵩,江 倫,張藝藍
(長春理工大學空地激光通信技術國防重點學科實驗室,吉林 長春 130022)
空間激光通信系統以激光為載體進行數據傳輸,由于大氣信道干擾、劇烈平臺擾動、強烈大氣附面層等不利影響,使得捕獲探測器接收到的光斑信號非常微弱,影響通信鏈路的建立,對捕獲探測器的靈敏度測量有助于分析和評價捕獲鏈路建立的最遠距離。在充分分析捕獲鏈路功率的基礎上搭建實驗系統,用掃描振鏡及CCD相機完成對其靈敏度測試實驗。實驗表明:當曝光時間為2ms和0.2ms時,相機的探測能力分別為-80.83dBm和-72.43dBm。在極限探測靈敏度下,選用高斯擬合算法進行激光光斑中心的定位計算,結果表明該算法定位精度可達0.01pixel,并且具有良好的穩定性。
探測靈敏度;高斯擬合;亞像素定位;激光通信
0 引 言
在空間激光通信捕獲、瞄睢和跟蹤(acquisition pointing and tracking,APT)系統中,粗、精探測器的探測精度決定著整個系統的跟蹤精度[1]。電荷耦合元件(charge coupled device,CCD)作為一種圖像傳感器,能夠方便給出目標圖像中的光強數值和光斑圖像的位置信息,常用在信標光(束散角為mrad量級)的探測中[2-3]。光斑圖像在CCD靶面上所占的面積越大,即像素數越多,光斑的定位精度也就越高。理想條件下CCD探測到的信標光斑為圓光斑,但是在大氣信道干擾、劇烈平臺擾動、強烈大氣附面層等不利影響下[4],探測器接收到的光斑信號功率和形狀不斷變化,完成快速捕獲、精密跟蹤和可靠通信的過程,其難度非常大。為了提高跟蹤精度,需要對接收單元的探測能力進行測試,進而分析出其靈敏度。文獻[5]主要分析了激光對CCD的損傷,并對CCD靶面進行標定;文獻[6]進行了星間跟蹤精度的測試,搭建測試平臺,并對APT系統參數分析;文獻[7]通過對激光光斑的特性分析,設計了通過確定光斑的半徑,實現對光斑的檢測。
本文基于以上分析,提出利用標定的衰減片聯合FPGA圖像處理板實時處理進入到CCD視場中的微弱光斑[8],根據設計的光斑中心定位算法,確保在相機極限探測能力下能夠捕獲到光斑并進行實時的處理[9]。通過實驗數據得出,當曝光時間分別為2ms和0.2 ms時,相機的極限探測能力分別為-80.83 dBm和-72.43dBm,完全滿足空間激光通信系統捕獲探測器接收到的光信噪比為7時,信標探測器所接收到的功率。
1 相機參數
為了實現對相機靈敏度的測試,選用Photonfocus公司生產的MV-D1024E-40型號的相機并搭建實驗平臺進行靈敏度的測試。通過實驗數據分析出該相機對微弱光斑的探測能力[10],對開展空間激光通信中捕獲單元的研究以及評價捕獲鏈路建立的最遠距離提供有價值的數據參考[11]。相機的主要設計參數如表1所示。

表1 相機參數
2 衰減片的標定
在進行靈敏度測試時,為了防止相機產生光飽和或者激光光斑能量過大而被打壞,在光路中采用衰減片將激光光強衰減到CCD相機可探測飽和光強以下,可探測靈敏度光強以上。
衰減片的標定光路如圖1所示,整個標定實驗在室內夜晚環境下進行,避免強背景光的影響。激光器選用波長為808nm的半導體激光器,功率可調。標定的具體步驟為:1)搭建好光路,開啟激光器,并調節功率大小,使光斑在監視器中的狀態是穩定并可被捕獲到;2)把光功率計放入圖1所示的位置,并記錄此時的示數為P1;3)在上述步驟不變的情況下,移除衰減片后讀取示數為P2;4)重復以上步驟,多次記錄P1,P2的數據,測試數據如表2所示。

圖1 衰減片標定
根據測試數據求取平均值,得到衰減片的平均衰減值為-32.33dB。在相機靈敏度測試中,將用-32.33dB作為衰減片的固定衰減值。
3 實驗過程
3.1 測試實驗平臺
為了完成相機靈敏度的測試,在室內搭建測試平臺(如圖2所示),其主要由發射和接收2個部分組成。發射系統由激光器、準直器、透鏡、掃描振鏡、反射鏡、濾波片、衰減片構成;接收系統由CCD相機、FPGA圖像處理板、監視器、計算機等部分構成[12]。激光從發射端射出,準直器對光束進行整形并輸出平行光;在透鏡的作用下使平行光聚焦,濾波片濾除反射后的雜光,使已經衰減過的光束在相機得到較好的光斑圖像。相機通過Camera Link接口將光斑圖像數據傳輸到FPGA圖像處理板中,在監視器中顯示光斑的坐標及捕獲狀態。計算機通過改變驅動電壓,實現振鏡的偏轉,調整光斑在相機中的成像位置,并記錄保存下光斑圖像,以便后續分析處理。

表2 衰減片測試數據

表3 粗跟蹤測試數據

表4 精跟蹤測試數據
3.2 實驗結果與分析
在測試實驗平臺搭建完后,不斷降低激光器的輸出功率,直到光功率計示數低于-50dBm;移走光功率計,用CCD相機接收衰減后的光束;調整激光功率,待到CCD光斑檢測臨界點時,再次放入光功率計并讀取示數,即可根據標定關系得出CCD靈敏度。通過調整曝光時間,獲取較好的光斑圖像分別進行粗、精跟蹤實驗。測試數據如表3、表4所示。
1)當曝光時間為2ms時,進行粗跟蹤實驗。
根據測試結果,求得相機靶面的平均接收功率值為-80.83dBm。
2)當曝光時間為0.2ms時,進行精跟蹤實驗。
根據測試結果,求得相機靶面的平均接收功率值為-72.43dBm。
本實驗在暗環境下進行,通過測試相機所能探測到的微弱光斑信號來反映相機的靈敏度。實驗驗證,在相同增益的前提下,增加相機的曝光時間[13],CCD視場中接收到的光能量就會增加,進而產生更多的光子數,使得光斑信號的信噪比有所提升,相機的探測能力就會增加。
4 基于FPGA的光斑識別技術
FPGA由于設計的靈活性高、功能強大、容量大、集成度高等特點,廣泛應用在圖像處理以及復雜算法的實現過程[14]。本實驗選用Xilinx公司的Spartan-3E系列XC3S1200E型號的FPGA實現光斑濾波、行列計數、光斑提取、光斑中心判決、脫靶量輸出和圖像顯示等功能,圖3是FPGA實現整個功能的流程圖[15]。
在連接FPGA圖像處理板的Camera Link接口中選用了Base模式下的A端口進行圖像數據的傳輸,通過接收到的4位圖像使能信號來實現圖像的采集與顯示[16]。4位圖像使能信號分別為LVAL(行有效信號)、FVAL(幀有效信號)、DVAL(數據有效信號)和 Spare(保留位)。

圖2 實驗系統組成框圖
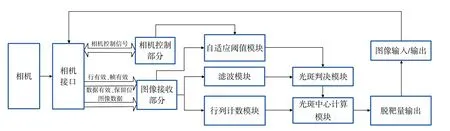
圖3 圖像處理算法流程圖
4.1 自適應閾值二值化
激光光斑的灰度值比圖像背景的灰度值要高,而且灰度值的變化比較劇烈[17]。在進行光斑檢測的時候,由于光子噪聲和讀出噪聲的干擾,接收到的光斑圖像會存在一些孤立的亮點,影響確定真實光斑的位置。為了避免噪聲對結果的影響,采用自適應閾值法,根據激光光斑的變化進行自適應選取最優閾值,減小隨機誤差,提高光斑的分割性能[18]。但是該算法在進行光斑中心計算時需要在短時間內解析一幀圖像的所有像素信息[19],對于處理器的計算能力要求較高。
自適應閾值的計算公式可表示為

式中:T——自適應閾值的計算結果;
Ravg——一幀圖像的灰度平均值;
k——常數,一般取值為5~15;
σ——光斑圖像灰度的均方差。
設激光光斑圖像為f,大小為m×n,圖像在像素點(i,j)的灰度值為 f(i,j),則有:

根據光斑圖像的灰度,選取最優的k值確定閾值大小進行背景與光斑圖像的分割,計算公式為

4.2 亞像素級光斑中心計算
對光斑圖像進行濾波和二值化之后,實現了對光斑的提取。本實驗中選用的相機像元尺寸為10.6μm×10.6μm,在進行光斑中心提取過程中,僅憑單個像素的空間分辨率無法滿足檢測精度的要求,這就需要對CCD進行亞像素細分[20]。
目前,最常用的亞像素算法有重心法、曲線擬合、徑向基函數插值法、密度函數估算法等。考慮到在硬件實際處理的復雜性和實時性,選用高斯曲線擬合定位算法,對經過預處理后的光斑圖像進行亞像素光斑的定位計算[21]。
對激光光斑而言,其能量分布滿足高斯分布函數[22-23],高斯曲線表達式可表示為

式中:T0——峰值參數,且I0為光斑在探測器上的總
x0、y0——光斑的中心位置;
σx、σy——激光光斑分別沿x,y方向上光強分布的標準差。
對式(4)兩端取對數,展開后可得到:

由最小二乘擬合算法計算出所有殘差的平方和并求取極小值,將擬合的極值點(x0,y0)作為光斑的中心位置。
通過以上算法,可以精確地計算出光斑的中心坐標,保證在進行靈敏度實驗時不會由于光斑能量的微弱而無法確定是否捕獲到的問題,提高了測試的準確性。為了驗證本文算法對光斑的定位精度,在實驗過程中,通過調整振鏡的方位得到20幀光斑圖像,并用Matlab對固定閾值質心算法、自適應閾值質心算法、高斯擬合算法進行仿真。

圖4 定位精度分析
從圖4中可以看出,前兩種算法對光斑中心的定位精度在0.1pixel,而高斯擬合算法的定位精度在0.01pixel,并且穩定性得到明顯提高。對其原因進一步理論分析可以得出:1)固定閾值質心法由于采用固定閾值,造成在一幀圖像中接近閾值的像素點被舍棄,使圖像分布不均勻,計算結果產生較大的誤差;2)采用自適應閾值后,根據每一幀圖像灰度值的變化,自動選擇合適的閾值,兼顧了圖像各個像素的情況;3)高斯擬合算法處理的光斑是由標準高斯函數離散化后得到的,其光斑的灰度矩陣是按照高斯函數形式分布的,即使大氣信道、噪聲和背景光的干擾使光斑產生閃爍、破碎、散斑效應等,通過擬合也可以得到比固定閾值質心算法更高的定位精度。
5 結束語
空間激光通信接收探測器的靈敏度是APT系統中的重要性能指標之一,在空間激光通信鏈路功率分析的基礎上,搭建實驗平臺,實現對相機的靈敏度測試。在微弱光斑信號條件下,利用亞像素細分技術,提高了光斑定位精度。
[1] 佟首峰,劉云清,姜會林.自由空間激光通信系統APT粗跟蹤鏈路功率分析[J].紅外與激光工程,2006,35(3):322-325.
[2]王家樂.基于光斑圖像的激光能量密度分布測量技術[D].長春:長春理工大學,2013.
[3]韓成,白寶興,楊華民,等.空地激光通信跟蹤精度主要外界影響因素研究[J].光子學報,2010,39(1):89-94.
[4]宋延嵩,常帥,佟首峰,等.航空激光通信系統的特性分析及機載激光通信試驗[J].中國激光,2016,43(12):215-226.
[5]王世勇.激光對CCD探測器干擾損傷的研究及模糊評估[D].長春:中國科學院研究生院(長春光學精密機械與物理研究所),2002.
[6] 胡渝.星間光通信跟蹤精度測試[D].成都:電子科技大學,2006.
[7]張愛麗.強天空背景光條件下空間激光通信系統的光斑檢測技術研究[D].長春:長春理工大學,2011.
[8] 陳小進.基于FPGA的圖像跟蹤系統的設計[D].南京:南京理工大學,2014.
[9] 陳毅強.衛星光通信中提高光斑定位精度方法研究[D].哈爾濱:哈爾濱工業大學,2015.
[10]李潔.激光光斑能量分布及中心定位的分析與研究[D].太原:中北大學,2015.
[11]姜會林.空間激光通信技術與系統[M].北京:國防工業出版社,2010:81-91.
[12]趙馨,宋延嵩,佟首峰,等.空間激光通信捕獲、對準、跟蹤系統動態演示實驗[J].中國激光,2014(3):125-130.
[13]董發祥.一種基于高靈敏度CCD的微光相機設計[D].西安:中國科學院研究生院(西安光學精密機械研究所),2010.
[14]YAN B, SUN Y, DING F, et al.Design of CMOS image acquisition system based on FPGA[J].Applied Mechanics&Materials,2011,40(20):510-515.
[15]姜會林,江倫,宋延嵩,等.一點對多點同時空間激光通信光學跟瞄技術研究[J].中國激光,2015(4):142-150.
[16]TOMASI M, PUNDLIK S, LUO G.FPGA-DSP coprocessing for feature tracking in smart video sensors[J].Journal of Real-Time Image Processing,2014,11(4):1-17.
[17]王杰飛,劉潔瑜,趙晗,等.一種改進的激光光斑中心亞像素定位方法[J].激光技術,2015(4):476-479.
[18]唐冠群.幾種激光光斑中心定位算法的比較[J].北京信息科技大學學報(自然科學版),2009,24(1):61-64.
[19]張樹方,佟首峰,于笑楠,等.激光目標模擬系統光斑尺度控制單元研究[J].光電工程,2015(11):88-94.
[20]李一芒,盛磊,陳云善,等.高速激光光斑檢測系統的設計與實現[J].激光技術,2015,39(4):533-536.
[21]SINHA S,ZHANG W.Low-power FPGA design using memoization-based approximate computing[J].IEEE Transactionson Very Large Scale Integration Systems,2016,24(8):2665-2678.
[22]張利群,李醒飛,王錯,等.基于滑動邊緣點的高斯擬合亞像素定位算法[J].計算機應用與軟件,2016,33(1):190-194.
[23]王麗麗,胡中文,季杭馨.基于高斯擬合的激光光斑中心定位算法[J].應用光學,2012,33(5):985-990.
(編輯:商丹丹)
An improved testing system for camera sensitivity
FAN Xinkun, ZHANG Lei, TONG Shoufeng, SONG Yansong, JIANG Lun, ZHANG Yilan
(Defence Key Subject Laboratory of Aero and Ground Laser Communication Technology,Changchun University of Science and Technology,Changchun 130022,China)
Space laser communication system uses laser as the carrier for data transmission.Due to adverse effects such as atmospheric channel interference, violent platform disturbance and strong atmospheric boundary layer, the spot signal
by the capture detector is very weak,which affects the establishment of communication link.The sensitivity measurement of the capture detector helps to analyze and evaluate the furthest distance that the capture link is established.Based on the full analysis of the capture link power,the scanning galvanometer and CCD camera for testing system is set up,which can accomplish sensitivity test.The test results show that when the exposure time is 2ms and 0.2ms,detectivity of camera is-80.83dBm and-72.43 dBm respectively.In the limit detection sensitivity,the Gaussian fitting algorithm is used to locate the center of the laser spot.The results show that the locating precision of the algorithm can reach 0.01 pixel with a good stability.
detection sensitivity; Gaussian fitting; sub-pixel positioning; laser communication
A
1674-5124(2017)06-0065-05
10.11857/j.issn.1674-5124.2017.06.014
2016-10-28;
2016-12-20
國家高新技術研究發展計劃“863計劃”資助項目(2014AA701178)
范新坤(1990-),男,吉林長春市人,碩士,主要從事空間激光通信系統高精度激光光斑識別與檢測技術研究。
張 磊(1982-),男,吉林長春市人,博士,主要從事復雜條件下目標的識別與檢測技術研究。
猜你喜歡
作文·小學低年級(2025年2期)2025-02-13 00:00:00
小雪花·小學生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學低年級(2024年2期)2024-04-29 00:00:00
作文·小學低年級(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(2022年4期)2022-08-09 08:52:06
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
