基于驅(qū)動機(jī)構(gòu)作動的柔性附件振動控制原理與算法
2017-08-17 12:02:11陳必發(fā)呂亮亮唐國安
載人航天 2017年4期
李 濤,陳必發(fā),呂亮亮,唐國安,?
·柔性結(jié)構(gòu)機(jī)構(gòu)動力學(xué)與控制·
基于驅(qū)動機(jī)構(gòu)作動的柔性附件振動控制原理與算法
李 濤1,陳必發(fā)1,呂亮亮2,唐國安1,2?
(1.復(fù)旦大學(xué)航空航天系,上海200433;2.上海宇航系統(tǒng)工程研究所,上海201108)
針對空間飛行器柔性附件低頻振動衰減緩慢降低系統(tǒng)穩(wěn)定性和可靠性的問題,以帶有驅(qū)動機(jī)構(gòu)的太陽能電池翼為例,不增加額外機(jī)構(gòu),提出了以驅(qū)動機(jī)構(gòu)為作動器、電池翼與驅(qū)動機(jī)構(gòu)約束扭矩為目標(biāo)的振動控制方法。推導(dǎo)了模態(tài)坐標(biāo)表示的電池翼振動的狀態(tài)方程,選擇第一階模態(tài)描述電池翼彎曲振動并設(shè)計反饋控制律。以鋼質(zhì)彈性直尺為模型,通過數(shù)值仿真驗證了該方法的有效性。
振動控制;電池翼;模態(tài)坐標(biāo);反饋控制
1 引言
太陽能電池翼是航天器上由太陽能電池片、太陽能電池基板、展開機(jī)構(gòu)、鎖定機(jī)構(gòu)、驅(qū)動機(jī)構(gòu)等組成的重要裝置。當(dāng)航天器入軌后,鎖定機(jī)構(gòu)釋放,由板間鉸鏈內(nèi)的扭簧驅(qū)動,最終展成一個平面,其作用是吸收太陽的輻射能并將其轉(zhuǎn)化成電能,為航天器提供能源[1]。
如今,各國航天器的發(fā)展呈現(xiàn)出大型化趨勢,大型太陽能電池翼能夠為航天器提供足夠的能源供給。但是,這些轉(zhuǎn)變也給航天器結(jié)構(gòu)的設(shè)計及安全運行帶來了一系列新的挑戰(zhàn)[2]。相對于航天器本體,太陽電池翼的柔性較大、阻尼比很小,致使其在定向、調(diào)姿、變軌等過程中被激起的振動頻率低,衰減緩慢。這些振動不僅影響航天器的姿態(tài)穩(wěn)定度、定位精度以及有效載荷的正常工作,嚴(yán)重時還會降低航天器的使用壽命甚至導(dǎo)致其結(jié)構(gòu)破壞[3],因此有必要采取有效措施對太陽翼的殘余振動進(jìn)行抑制。
有關(guān)太陽翼在航天器變軌過程中的減振研究表明:傳統(tǒng)的被動振動控制方法具有結(jié)構(gòu)簡單、易于實現(xiàn)、經(jīng)濟(jì)性良好等優(yōu)點,是較早使用的振動抑制方法,這種方式需要使用額外硬件,對振動進(jìn)行機(jī)械隔離或者通過能量消耗的方式衰減振動。其采用的裝置通常包括彈性阻尼元件和彈性元件等[4]。但受結(jié)構(gòu)質(zhì)量、材料性能等因素的制約,減振效果不易達(dá)到太陽能電池翼振動控制的嚴(yán)苛要求[5]。那帥、朱春艷等將輸入整形技術(shù)應(yīng)用于抑制太陽翼調(diào)姿后的殘余振動,利用驅(qū)動機(jī)構(gòu)現(xiàn)有的硬件、無需增加其他附件,將初始參考指令與一系列脈沖序列卷積生成整形指令作為輸入信號,取得了不錯效果[6?8]。有學(xué)者采用開關(guān)式噴射發(fā)動機(jī)、運用不同的開關(guān)策略來實現(xiàn)振動抑制[9],但作動需要消耗工質(zhì),不宜頻繁采用。應(yīng)用壓電陶瓷、壓電聚合物等壓電材料為作動器的主動控制技術(shù)發(fā)展迅速,控制效果顯著[10?15]。但這類方法需要復(fù)雜的理論推導(dǎo)和嚴(yán)苛的控制條件,控制器的參數(shù)設(shè)計存在不少經(jīng)驗因素。航天器太陽電池翼通常自備驅(qū)動機(jī)構(gòu),用于調(diào)整太陽帆姿態(tài)實現(xiàn)其對日定向。鑒于驅(qū)動機(jī)構(gòu)輸出功率大又不消耗工質(zhì)的特點,將其作為振動控制的作動器,對航天器而言,不增加額外的非有效質(zhì)量,因此,對其原理和算法值得進(jìn)行探索和研究。
2 驅(qū)動機(jī)構(gòu)作動的電池翼控制方程
為簡化考慮,在分析電池翼振動時將航天器本體視為靜止體。圖1所示為一航天器太陽翼簡化模型。以太陽翼根部為原點、延伸方向為Z軸、垂直于太陽翼面方向為X軸,根據(jù)右手定則在太陽翼上建立隨驅(qū)動機(jī)構(gòu)運動的直角坐標(biāo)系O-XYZ。當(dāng)驅(qū)動機(jī)構(gòu)作用時,該坐標(biāo)系繞Y軸轉(zhuǎn)動,轉(zhuǎn)動角度等于驅(qū)動角,記為α。
對于大型太陽能電池翼來說,其振動主要發(fā)生在低階彎曲模態(tài),因此將控制對象鎖定為太陽翼在YOZ平面內(nèi)的橫向彎曲振動,控制量為調(diào)姿驅(qū)動器沿Y軸轉(zhuǎn)動的角加速度α¨。
電池翼受激勵后發(fā)生振動,參考該坐標(biāo)系的相對位移記為xr。由于參考坐標(biāo)系是非慣性坐標(biāo)系,應(yīng)用達(dá)朗貝爾原理可以列出電池翼的運動方程如式(1):
式中,M、C、K分別為太陽能電池翼有限元模型的質(zhì)量陣、阻尼陣和剛度陣,xr={x1x2…xn}T為節(jié)點位移向量,f(t)為慣性力。
設(shè)太陽翼繞驅(qū)動點轉(zhuǎn)動的剛體約束模態(tài)為Ψ,當(dāng)轉(zhuǎn)動角加速度為α¨時,太陽翼上各處的加速度為α¨Ψ,則慣性力可表示為式(2):
將其代入方程(1)可得式(3):在線性變形范圍內(nèi),驅(qū)動機(jī)構(gòu)的彎矩正比于電池翼的相對位移,可寫成式(4):
選取若干太陽翼根部固支的固定界面主模態(tài)Φ,將位移向量xr表示為式(5):
然后代入方程(3),并在方程兩端同時乘以矩陣ΦT,根據(jù)模態(tài)的正交性,可以得到式(6):
其中各變量符合式(7):
彎矩表達(dá)式(4)則變?yōu)槭剑?):
將式(6)表達(dá)為式(9)所示狀態(tài)空間的形式:
其中各變量符合式(10):
式(6)為解耦的系統(tǒng)模態(tài)運動方程,其第i階方程可表示為式(11):
對于大型太陽翼而言,其大幅振動主要由第一階模態(tài)振動構(gòu)成,故可取i=1來研究太陽翼系統(tǒng)的振動控制問題。
3 控制律的設(shè)計
太陽翼第一階振動的模態(tài)運動方程為式(12):
式(12)右端為驅(qū)動結(jié)構(gòu)的輸入扭矩,可表示為式(13):
其中ζa為人工阻尼系數(shù)。此時式(12)可寫為式(14):
根據(jù)式(14),在小阻尼情況下,人工阻尼ζa越大,太陽翼振動衰減越快。
相較于驅(qū)動機(jī)構(gòu)的角加速度α¨,其角速度α·的控制更容易實現(xiàn)。將式(13)兩端積分得式(15):
記驅(qū)動機(jī)構(gòu)的轉(zhuǎn)速為式(16):
由公式(8),僅考慮一階模態(tài)時,太陽翼根部即1號節(jié)點處彎矩可表示為式(17):
結(jié)合(15)、(17),驅(qū)動機(jī)構(gòu)轉(zhuǎn)速與彎矩之間有式(18)所示關(guān)系:
4 仿真算例的驗證
為了驗證該振動控制方法的有效性,考慮到圖1太陽翼模型結(jié)構(gòu)的對稱性,將其簡化為圖2所示帶配重的鋼尺。鋼尺截面為40×2(mm)的矩形,左端固定,安裝了m1、m2兩個配重,楊氏模量E=2.1×1011Pa,密度ρ=7.8×103kg/m3,泊松比ν=0.3。設(shè)定一階模態(tài)阻尼比ζ1=0? 002 3,由Nastran算得鋼尺第一階固有頻率ω1=4? 8406 rad/s。
仿真共設(shè)計了兩種工況。其中工況1給定鋼尺末端初始位移,模擬地面實驗狀況;工況2驅(qū)動機(jī)構(gòu)作動作為初始激勵,模擬太陽能電池翼在軌調(diào)姿過程后的殘余振動。在此基礎(chǔ)上,利用MATLAB進(jìn)行仿真。
工況1中,給定鋼尺末端0? 1 m形變作為初始位移,根據(jù)公式(18),考慮到驅(qū)動機(jī)構(gòu)的最大轉(zhuǎn)速能力,設(shè)定控制增益β=Ωmax/Tzmax=0? 052 9。鋼尺根部約束彎矩隨時間變化的曲線如圖3所示,結(jié)果表明實施控制加速了振動的衰減。
為驗證控制增益對振動抑制效果的影響,選取4組不同的增益,等效為4組人工阻尼系數(shù),其中第1組設(shè)置增益為0,根據(jù)式(18),相當(dāng)于驅(qū)動機(jī)構(gòu)轉(zhuǎn)速Ω為零,不加控制,仿真結(jié)果見圖4。
記錄振動衰減到最大振幅5%所用的時間,見表1。

表1 不同增益下衰減時間及最大驅(qū)動轉(zhuǎn)速Table 1 Attenuation time and maximum driving rota?tional speed with different control gains
由表1可知,隨著控制增益增大,等效的人工阻尼系數(shù)相應(yīng)增大,鋼尺振動幅度衰減到低于最大振幅5%所用的時間依次減少為19? 5 s、10? 4 s、7? 8 s,相較于不加控制時需要268? 69 s,時間依次縮短為原來的7? 26%、3? 87%和2? 9%,與理論分析一致。同時,隨著控制增益的增大,所需要的驅(qū)動機(jī)構(gòu)的最大轉(zhuǎn)速也在提高。因此,應(yīng)根據(jù)驅(qū)動機(jī)構(gòu)轉(zhuǎn)速的最大能力來選擇相應(yīng)的增益系數(shù)。
工況2利用驅(qū)動機(jī)構(gòu)作動,采用梯形信號輸入,初始1? 28 s內(nèi)驅(qū)動機(jī)構(gòu)轉(zhuǎn)速Ω如圖5所示。
實施控制前后,鋼尺根部約束彎矩隨時間變化的曲線如圖6所示,結(jié)果表明實施控制加速了振動衰減,效果顯著。
同樣,為驗證控制增益對振動抑制效果的影響,選取4組不同的增益也即4組人工阻尼系數(shù)見表2,第一組增益設(shè)置為0,根據(jù)式(18),相當(dāng)于驅(qū)動機(jī)構(gòu)轉(zhuǎn)速Ω為0,不加控制,仿真結(jié)果見圖7。
記錄振動衰減到最大振幅5%所用的時間,見表2。
由表2可知,隨著控制增益增大,等效的人工阻尼系數(shù)相應(yīng)增大,鋼尺振動幅度衰減到低于最大振幅5%所用的時間依次減少為9? 49 s、4? 42 s、3? 11 s,相較于不加控制時需要266? 44 s,時間依次縮短為原來的3? 56%、1? 66%和1? 17%。同樣,隨著控制增益的增大,所需要的驅(qū)動機(jī)構(gòu)的最大轉(zhuǎn)速也在提高。因此,應(yīng)根據(jù)驅(qū)動機(jī)構(gòu)轉(zhuǎn)速的最大能力來選擇相應(yīng)的增益系數(shù)。
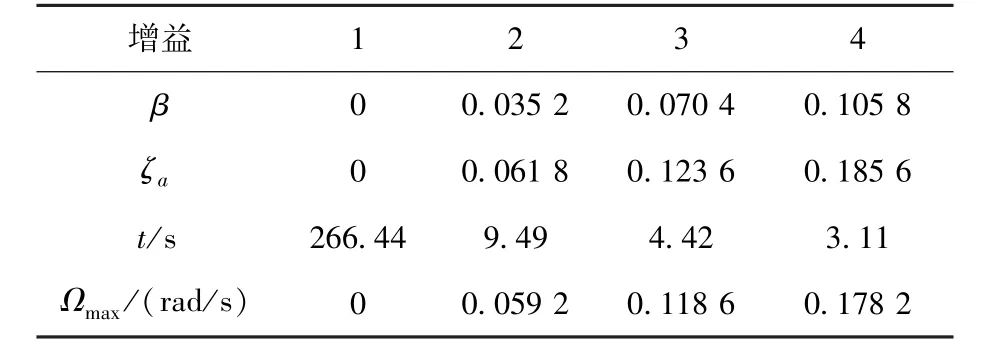
表2 不同增益下衰減時間及最大驅(qū)動轉(zhuǎn)速Table 2 Attenuation time and maximum driving rota?tional speed with different control gains
5 結(jié)論
針對航天器柔性附件的振動問題,結(jié)合計算機(jī)仿真,實現(xiàn)了以驅(qū)動機(jī)構(gòu)為作動器的振動控制方法,仿真結(jié)果表明:
1)基于驅(qū)動機(jī)構(gòu)作動的柔性附件振動控制方法能產(chǎn)生明顯的減振效果;
2)在小阻尼情況下,控制增益越大,等效的人工阻尼系數(shù)越大,振動衰減的速率越快。
(References)
[1] 袁家軍.衛(wèi)星結(jié)構(gòu)設(shè)計與分析[M].北京:中國宇航出版社,2004.Yuan Jiajun.Design and Analysis of Satellite Structure[M].Beijing:China Aerospace Press,2004.(in Chinese)
[2] 黃文虎,王心清.航天柔性結(jié)構(gòu)振動控制的若干新進(jìn)展[J].力學(xué)進(jìn)展,1997,27(1):5?18.Huang Wenhu,Wang Xinqing.Recent advances in vibration control of flexible structures[J].Advances in Mechanics,1997,27(1):5?18.(in Chinese)
[3] 李東旭.撓性航天器結(jié)構(gòu)動力學(xué)[M].北京:科學(xué)出版社,2010.Li Dongxu.Structural Dynamics of Flexible Spacecraft[M].Beijing:Science Press,2010.(in Chinese)
[4] 許雲(yún)淞.撓性衛(wèi)星姿態(tài)機(jī)動及太陽帆板振動抑制研究[D].哈爾濱:哈爾濱工業(yè)大學(xué),2014.Xu Yunsong.Research on Attitude Control and Solar Array Vibration suppression of a Flexible Satellite[D].Harbin:Harbin Institute of Technology,2014.(in Chinese)
[5] Maly J R.Hubble space telescope solar array damper[C]//1999 Symposium on Smart Structures and Materials.Interna?tional Society for Optics and Photonics,1999:186?197.
[6] 那帥,朱春艷,彭福軍,等.基于輸入整形技術(shù)的太陽翼調(diào)姿殘余振動抑制實驗研究[J].振動與沖擊,2013,32(7):107?112.Na Shuai,Zhu Chunyan,Peng Fujun,et al.Test for residual vibration suppression of a solar array during attitude control based on input shaping technique[J].Journal of Vibration and Shock,2013,32(7):107?112.(in Chinese)
[7] 朱春艷,邵濟(jì)明,那帥,等.太陽電池翼調(diào)姿后殘余振動抑制的整形器設(shè)計[J].振動與沖擊,2012,31(8):176?180.Zhu Chunyan,Shao Jiming,Na Shuai,et al.Design and simulation of input shaper for residual vibration suppression after attitude adjustment of a solar array[J].Journal of Vibra?tion and Shock,2012,31(8):176?180.(in Chinese)
[8] 朱春艷,紹濟(jì)明,唐國安.雙輸入整形器抑制兩軸轉(zhuǎn)動太陽翼調(diào)姿后的殘余振動[J].噪聲與振動控制,2011,32(6):1?4.Zhu Chunyan,Shao Jiming,Tang Guoan.Design and simula?tion ofdouble?input shaper for suppressing residual vibration after attitude adjustment of solar array[J].Noise and Vibra?tion Control,2011,32(6):1?4.(in Chinese)
[9] 任萱.人造地球衛(wèi)星軌道力學(xué)[M].長沙:國防科技大學(xué)出版社,1988.Ren Xuan.Orbital Mechanics of Artificial Earth Satellite[M].Changsha:National Defense Science and Technology University Press,1988.(in Chinese)
[10] Meyer J L,Harrington W B,Agrawal B N,et al.Vibration suppression of a spacecraft flexible appendage using smart ma?terial[J].Smart Materials&Structures,1998,7(1):95.
[11] Song G,Agrawal B N.Vibration suppression of flexible spacecraft during attitude control[J].Acta Astronautica,2001,49(2):73?83.
[12] Hu Q,Ma G.Spacecraft vibration suppression using variable structure output feedback control and smart materials[J].Journal of Vibration&Acoustics,2006,128(2):221?230.
[13] Sales T P,Rade D A,Souza L C G D.Passive vibration con?trol of flexible spacecraft using shunted piezoelectric transduc?ers[J].Aerospace Science&Technology,2013,29(1):403?412.
[14] Wu D,Huang L,Pan B,et al.Experimental study and nu?merical simulation of active vibration control of a highly flexi?ble beam using piezoelectric intelligent material[J].Aero?space Science&Technology,2014,37:10?19.
[15] Hardy S M,Lindgren M,Konakanchi H,et al.Decentralized vibration control of a multi?link flexible robotic manipulator u?sing smart piezoelectric transducers[J].Acta Astronautica,2014,104(1):186?196.
(責(zé)任編輯:龍晉偉)
Principle and Algorithm of Vibration Control in Flexible Appendage Based on Actuating Mechanism
LI Tao1,CHEN Bifa1,LV Liangliang2,TANG Guoan1,2?
(1.Department of Aeronautics and Astronautics Fudan University,Shanghai 200433,China;2.Shanghai Institute of Aerospace System Engineering,Shanghai 201108,China)
The flexible appendage of a spacecraft usually has the feature of low rigidity and damping,and the slow attenuation of the low?frequency vibration may reduce the stability and reliability of the aircraft system.To solve the vibration problem of the spacecraft flexible appendage,the solar battery wings with driving mechanism was taken as an example and a vibration control method was proposed without adding any additional mechanism.The driving mechanism was used as the actuator and the constraint moment of the wings and driving mechanism was controlled.The state equation of the vibra?tion of the battery wings was derived by the modal coordinates.The first order mode was used to de?scribe the vibration of the battery wings and the feedback control law was developed.The effectiveness of the method was verified by numerical simulation with the steel elastic ruler as the model.
vibration control;battery wings;modal coordinates;feedback control
O328
A
1674?5825(2017)04?0482?05
2017?01?18;
2017?06?12
國家自然科學(xué)基金(11572089)
李濤,男,碩士研究生,研究方向為結(jié)構(gòu)動力學(xué)與振動控制。E?mail:taoli15@fudan.edu.cn
?通訊作者:唐國安,男,碩士,教授,研究方向為動力學(xué)與控制。Email:tangguoan@fudan.edu.cn
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
艦船科學(xué)技術(shù)(2022年8期)2022-06-05 07:36:28
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
中國公路(2017年18期)2018-01-23 03:00:38
數(shù)學(xué)物理學(xué)報(2017年6期)2018-01-22 02:26:40
廣西科技大學(xué)學(xué)報(2016年1期)2016-06-22 13:10:37
湖北經(jīng)濟(jì)學(xué)院學(xué)報·人文社科版(2015年8期)2015-12-29 05:53:07
航空學(xué)報(2015年4期)2015-05-07 06:43:35
上海電機(jī)學(xué)院學(xué)報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:44