套筒驅動的大型可展收柔性太陽翼地面展開重力卸載研究
2017-08-17 12:02:11楊巧龍閆澤紅任守志宋曉東何鵬鵬
載人航天 2017年4期
楊巧龍,閆澤紅,任守志,宋曉東,何鵬鵬
套筒驅動的大型可展收柔性太陽翼地面展開重力卸載研究
楊巧龍1,閆澤紅1,任守志1,宋曉東2,何鵬鵬3
(1.北京空間飛行器總體設計部,北京100094;2.北京理工大學宇航學院,北京100081;3.北京衛(wèi)星制造廠,北京100092)
大型空間展開機構在微重力環(huán)境工作,自身不具備克服地面重力展開的能力,在地面進行展開試驗驗證時,需對機構進行重力卸載。套筒驅動的大型可展收柔性太陽翼存在在軌展開步驟多路徑復雜、活動部件多、收攏構型緊湊而展開尺度大的特點,地面重力卸載難以實現(xiàn)。以過程無需調整航天器姿態(tài)就完成全部展開步驟為目標,利用氣浮法、配重法、懸吊法等對展開過程的不同步驟設計了相應的重力卸載方案。采用特殊構型的工裝解決了干涉問題,采用主動牽引的方法消除了工裝引入的摩擦力。方案得到地面展開試驗驗證,具有工程借鑒價值。關鍵詞:柔性太陽翼;重力卸載;氣浮法;配重法;懸吊法
1 引言
太陽翼是航天器的常用供電設備,入軌前呈收攏壓緊狀態(tài),既能滿足整流罩包絡限制又能承受發(fā)射段載荷;入軌后展開提供足夠的光照面積。為了驗證太陽翼展開功能,需在地面進行展開功能驗證試驗。但針對空間失重環(huán)境設計的空間展開機構通常不具備克服自身地面重力的能力,需要重力卸載裝置對各展開部件進行卸載,最大限度地降低地面重力對機構展開功能的影響[1]。
傳統(tǒng)剛性太陽翼的展開部件數(shù)量少、展開步驟少,且各部件剛度高、間距大,其地面重力卸載容易實現(xiàn)[2]。而柔性太陽翼從收攏狀態(tài)到展開狀態(tài)構型變化大,通常包含多個展開步驟,由于各個步驟的運動規(guī)律不同,需要不同的重力卸載裝置,難以實現(xiàn)連續(xù)完整的地面展開試驗,國外通常采取針對各個展開步驟的部件級驗證方法[3]。該方法雖然降低了地面重力卸載的實現(xiàn)難度,但與整翼級驗證相比,不夠系統(tǒng)直觀,不夠充分有效。
文章以套筒驅動的大型可展收柔性太陽翼為研究對象開展地面重力卸載研究,提出一種中間過程無需調整航天就完成全部展開步驟的整翼級驗證方案。此外,由于柔性太陽翼中的主要功能部件柔性太陽毯由數(shù)量龐大的柔性單元組成,每個單元厚度小、柔度大,其卸載工裝的干涉避讓問題難以解決,而且還要保證引入的阻力不會對產品造成不可接受的影響。針對這些難點問題,文章亦提出了一種解決方案。
2 柔性太陽翼及其展開過程
套筒驅動的大型可展收柔性太陽翼是柔性太陽翼領域的一個分支[4]。該柔性太陽翼主要由套筒組件、太陽毯組件、箱板組件、撐桿、鉸鏈、壓緊釋放裝置、電池電路、電纜等部件組成。發(fā)射階段,太陽翼收攏壓緊在航天器外壁。當入軌后根據(jù)程控指令,太陽翼箱板、套筒組件等依次解鎖,展開到位,分步完成太陽翼展開過程。太陽翼展開過程如圖1所示。該太陽翼空間展開過程如下:
1)首先,整翼壓緊釋放裝置解除航天器側壁與太陽翼箱板組件和套筒組件的約束,整個太陽翼在根部鉸鏈的驅動下展開90°并鎖定,如圖1(b)狀態(tài)所示,即展開過程的第一步結束;
2)根部鉸鏈鎖定后,箱板與套筒組件之間的壓緊釋放裝置工作,解除兩個箱板組件與套筒組件的約束,然后兩箱板組件在箱板鉸鏈和下?lián)螚U的驅動下展開并鎖定,如圖1(c),即展開過程的第二步結束;
3)箱板壓緊釋放裝置解鎖,解除上下箱板之間的約束;套筒驅動電機開始工作,驅動套筒桿展開,直到套筒完全展開,如圖1(d)所示,即展開過程的第三步完成。
3 柔性太陽翼重力卸載方案
3? 1 地面重力卸載的注意事項
空間機構重力卸載技術經過幾十年的發(fā)展,相繼出現(xiàn)了落塔法、懸吊法、水浮法和氣浮法等,這些方法均有各自的優(yōu)缺點[5]。為實現(xiàn)套筒驅動的柔性太陽翼整翼級地面驗證,進行地面重力卸載方案設計需遵循如下原則:
1)盡可能抵消重力影響;
2)盡可能避免引入附加力;
3)盡可能降低工裝重量;
4)盡可能減少人為干預;
5)盡可能保證試驗過程的連續(xù)性;
6)盡可能節(jié)約成本。
3? 2 總體方案
柔性太陽翼展開過程各階段的運動特點見表1。
為實現(xiàn)整翼級驗證的目標,首先需確定柔性太陽翼的初始姿態(tài)。由表1分析可知,展開過程第一步和第二步由于運動規(guī)律簡單、活動部件少,重力卸載容易實現(xiàn)。展開過程第三步由于部件多、重量大、尺寸小、質心軌跡復雜的原因,重力卸載難度最大。因此,建立整翼初始姿態(tài)時需保證展開過程第三步在此姿態(tài)下的重力卸載最易實現(xiàn)。通過對各種重力卸載方法的研究可知,當機構質心在水平面內運動時,由于重力不做功,重力卸載較易實現(xiàn)[6]。為使展開過程第三步各部件質心在水平面內運動,初始姿態(tài)中模擬航天器太陽翼安裝面的模擬墻應豎直擺放。
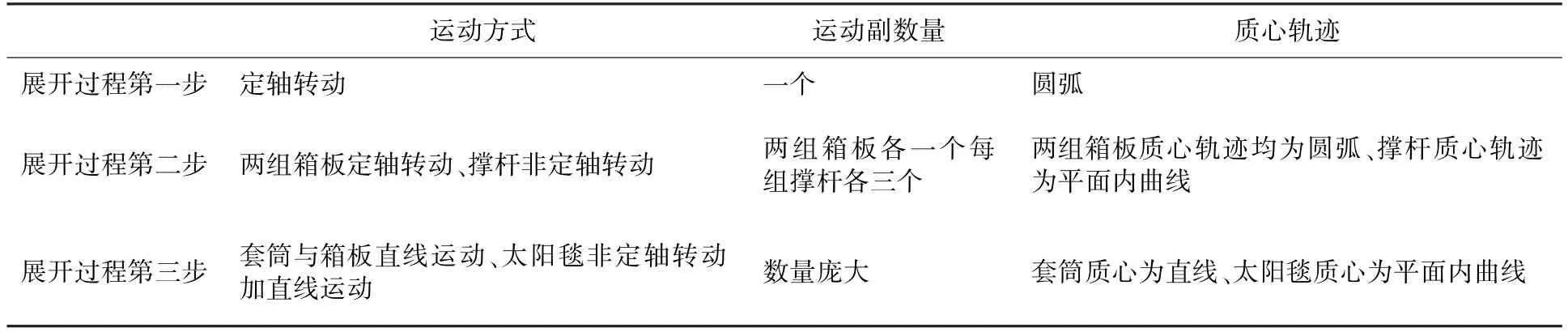
表1 太陽翼展開過程中各階段運動特點Table 1 Movement characteristics of each step in the deployment process
建立初始姿態(tài)后,展開過程第一步為水平面內的定軸轉動,可采用氣浮法實現(xiàn)重力卸載。展開過程第二步為豎直面內的翻轉運動,可采用配重法實現(xiàn)重力卸載。展開過程第三步為水平面內的伸展運動,可采用懸吊法實現(xiàn)重力卸載。
3? 3 各展開步驟的重力卸載
3? 3? 1 第一步
展開過程第一步采用氣浮法卸載。氣浮卸載原理如下:在柔性太陽翼組合體的質心處安裝一氣浮支撐組合體,氣浮支撐組合體上安裝有空氣軸承,可在底部的氣浮平臺自由運動[7]。這種方案的好處是柔性太陽翼展開過程中基本不會受到阻力,并且可以方便的調整氣浮平臺的平面度,如圖2。
3? 3? 2 第二步
展開過程第二步為箱板組件展開。對單個箱板組件運動而言,箱板繞自身轉軸回轉,箱板質心與轉軸不重合,重力對轉軸的力矩符合余弦規(guī)律,起始位置為最大,終止位置為0。如果在質心處增加支撐力,箱板質心存在上下運動,則其作用點需能夠隨箱板的運動而上下運動,因此箱板支撐工裝需具有上下運動自由度,結構復雜,且工程實現(xiàn)上比較困難。重力卸載最終的目的是消除轉軸處重力產生的力矩影響,因此可以通過增加配重,使箱板組件和配重的質心與箱板轉軸重合,合力矩為0。配重方案雖然工裝質量較大,但工程實現(xiàn)相對容易可靠,而且通過配重的適當調整可以有效保證箱板組件順利展開,如圖3。
3? 3? 3 第三步
在展開過程第三步中,套筒與活動箱板沿水平方向直線伸展,展開過程中無質心波動。太陽毯的運動為水平面內的平動與轉動的疊加,運動過程中質心位置無上下波動。由于中套筒組件、兩個太陽毯均進行展開,活動部件較多,且均要進行重力卸載,因此柔性太陽翼展開過程第三步非常復雜。本文采用在展開架下吊掛卸載的方案,如圖4所示。重力卸載主要包括太陽毯卸載和套筒組件卸載。其中,太陽毯卸載工裝采用配重懸臂方案,套筒卸載工裝方案采用直接吊掛卸載方案。
1)太陽毯單元的卸載
柔性太陽翼共有兩個柔性太陽毯,收攏狀態(tài)兩個柔性太陽毯安置于兩個箱板組件中[3?4]。單個柔性太陽毯有52片太陽毯單元組成,收攏時,52片太陽毯單元以“手風琴”的方式疊合在一起。每片太陽毯單元的厚度約為1 mm。太陽毯單元數(shù)量多、厚度小是造成重力卸載難度大的主要原因[3]。柔性太陽毯收攏狀態(tài)如圖5所示。
柔性太陽毯兩端與箱板相連,其展開過程軌跡如圖6所示,可見柔性太陽毯展開過程中太陽毯的質心在橫向上會有變化,且變化的距離為太陽電池板寬度的一半。重力卸載的補償力通常施加在質心上[1],因此,質心位置的變化是卸載方案必須考慮的。
太陽毯重力卸載工裝采用配重懸臂方案。見圖7,配重懸臂方案采用平衡秤原理,由于太陽毯收攏和展開過程中質心在垂直于展開方向上變化距離為半個太陽板的寬度,因此通過對每塊太陽板增加配重,使配重和太陽板組合體的質心配合到太陽毯最終展開位置上,實現(xiàn)太陽翼展開過程的重力卸載。
采用“刀片”式的配重方案能旨在降低配重厚度,適應太陽毯薄的特點。由于配重數(shù)量較多會導致作用在導軌上的摩擦力顯著提升,因此需要采用特定的方法抵消配重工裝產生的摩擦力,本方案中采用了主動拖動的方案來抵消摩擦力影響,原理見圖8。各太陽毯單元的吊掛通過定長拖繩連接,端部的吊掛通過電動拖車牽引。在箱板的吊繩處安裝有1個角度傳感器,反饋輸入給電機的控制器,控制器根據(jù)此反饋信號來控制電機的跟隨運動方向和運動速度。當滯后1°左右時,電機才會啟動,跟隨箱板運動,故不會對太陽毯引入主動拖動力。
2)上下兩組太陽毯的連接方案
由于太陽毯分別位于套筒部分的上下兩側,因此為完成下方太陽毯的卸載,上下兩太陽毯通過C形工裝連接起來,以避免工裝與套筒的干涉,如圖9所示。每相鄰4片太陽毯為一組,通過形狀相似、尺寸不同的C型工裝連接。C型工裝嵌套連接,初始裝配狀態(tài)緊密排列,工裝在厚度方向通過連接吊繩的調整完成。
3)套筒卸載方案
套筒卸載采用圖10所示托舉卸載方案,由于套筒上下均有太陽毯,直接從上方吊掛將不可避免地產生與太陽毯的干涉問題。在套筒側翼布置導軌,從導軌伸出懸臂對套筒底部進行支撐能夠有效避開太陽毯。由于套筒展開長度較長,各套筒均應安裝吊掛,以抵消其重力。
4 試驗驗證
采用本文提出的重力卸載方案對某套筒驅動的大型柔性太陽翼進行展收驗證試驗。
展開試驗前,太陽翼收攏壓緊在模擬墻上,將模擬墻置于支架車上調整姿態(tài),使模擬墻呈豎直狀態(tài)。之后安裝展開試驗第一步的重力卸載工裝,該工裝采用氣浮法卸載重力,對套筒、上箱板組件、下箱板組件分別進行支撐,各組件的重力均得到卸載。圖11展示了柔性太陽翼第一步展開過程。
展開試驗第一步結束后,安裝用于展開試驗第二步重力卸載的翻轉配重。展開過程第二步為箱板組件展開,由于兩組箱板組件的運動具有獨立性,相應的翻轉配重也是各自獨立的。圖12展示了柔性太陽翼第二步展開過程。
展開試驗第二步結束后,將柔性太陽毯、套筒分別與各自的吊掛裝置連接。柔性太陽毯吊掛裝置和導軌位于太陽毯正上方,套筒托舉裝置和導軌位于套筒側方。上、下兩組太陽毯通過C型工裝連接。圖13展示了柔性太陽翼第三步展開過程,在此過程中,具有運動跟隨功能的電動拖車提供牽引力,用于克服吊掛裝置的摩擦力。
采用上述重力卸載裝置,成功實現(xiàn)了在一次姿態(tài)調整后完成全部展開步驟,各展開步驟間僅進行地面工裝的操作,不干預柔性太陽翼的產品狀態(tài)。柔性太陽翼的收攏步驟與展開步驟可逆,不做贅述。展收試驗充分證明了本文所采用的重力卸載方案合理可行。
5 結論
本文針對套筒驅動的大型柔性太陽翼的產品特點,分析了各展開步驟的運動規(guī)律,以航天器在同一姿態(tài)下連續(xù)完成全部展開步驟為目標,綜合使用了氣浮法、配重法、懸吊法等多種重力卸載方法,提出適應該柔性太陽翼的重力卸載方案,并通過試驗驗證了該方案的合理性。
(References)
[1] 從強.空間機構地面重力補償設備跟蹤研究[J].航天器環(huán)境工程,2012,29(1):92?99.Cong Qiang.An investigation into gravity compensation equip?ment for space mechanisms[J].Spacecraft Engineering,2012,29(1):92?99.(in Chinese)
[2] 任守志,劉立平.零重力試驗裝置對太陽翼展開影響分析[J].航天器環(huán)境工程,2008,17(6):73?78.Ren Shouzhi,LIU Liping.Influence of the zero?gravity test fa?cility on the solar array’s deployment test[J].Spacecraft En?gineering,2008,17(6):73?78.(in Chinese)
[3] Chung D T.Deployment/retraction ground testing of a large flexible solar array[R].NASA?CP?2221,NAS 1? 55:2221,1982.
[4] 楊巧龍,任守志,王舉,等.柔性太陽翼技術發(fā)展現(xiàn)狀及其關鍵技術研究[C]//可展開空間結構學術會議.西安,2014.Yang Qiaolong,Ren Shouzhi,WANG Ju,et al.Research on the development status and key technology of flexible solar wing technology[C]//Deployable Space Structure Conference.Xi’an,2014.(in Chinese)
[5] 齊乃明,張文輝,高九州,等.空間微重力環(huán)境地面模擬試驗方法綜述[J].航天控制,2011,29(3):95?100.Qi Naining,Zhang Wenhui,Gao Jiuzhou,et al.The primary discussion for the ground simulation system of spatial micro?gravity[J].Aerospace Control,2011,29(3):95?100.(in Chi?nese)
[6] 徐文福,梁斌,李成,等.空間機器人微重力模擬實驗系統(tǒng)研究綜述[J].機器人,2009,31(1):88?96.Xu Wenfu,Liang Bin,Li Cheng,et al.A review on simulated micro?gravity experiment systems of space robot[J].Robot,2009,31(1):88?96.(in Chinese)
[7] 張文輝.漂浮基空間機械臂的三維微重力環(huán)境模擬方法探討[J].空軍工程大學學報(自然科學版),2014,15(2):86?90.Zhang Wenhui.Discussion of three?dimensional microgravity simulation methods for free?floating space manipulators[J].Journal of Air Force Engineering University(Natural Science Edition),2014,15(2):86?90.(in Chinese)
(責任編輯:龍晉偉)
Study on Gravity Compensation in Ground Deployment Tests of Large
Retractable Flexible Solar Array Driven by Telescopic Boom
YANG Qiaolong1,YAN Zehong1,REN Shouzhi1,SONG Xiaodong2,HE Pengpeng3
(1.Beijing Institute of Spacecraft System Engineering,Beijing 100094,China;2.Beijing Institute of Technology,Beijing 100081,China;3.Beijing Spacecraft,Beijing 100092,China)
The large space deployable mechanism working in microgravity environment cannot work under the ground gravity,so it is quite necessary to compensate the gravity of the mechanism during the ground test.The ground gravity compensation for the large deployable flexible solar array driven by telescopic boom is difficult to realize due to the characteristics such as the multiple steps in de?ployment,the complex path,the many moving parts,the compact configuration and the large expan?sion scale.To complete all the deployment steps without spacecraft attitude adjustment,the air flota?tion method,the counterweight method and the suspension method were adopted to design the corre?sponding gravity compensation scheme for each step of the deployment process.The interference problem was solved by using a special configuration device,and the frictional force of the device was counteracted by active traction.The scheme was verified by ground test and may serve as a good ref?erence for the engineering application.
flexible solar array;gravity compensation;air flotation;counterweight;suspension
V11
A
1674?5825(2017)04?0536?05
2016?12?14;
2017?06?30
楊巧龍,男,碩士,研究員,研究方向為航天器結構機構設計、太陽電池陣系統(tǒng)設計。E?mail:37640647@qq.com