基于梯度下降法和雙環PID的四旋翼飛行器的研究與設計
2017-09-25 14:56:01馬婭婕彭攀來劉國慶金瑾徐高凱
現代電子技術 2017年18期
關鍵詞:無人機
馬婭婕++彭攀來+劉國慶+金瑾+徐高凱
摘 要: 四旋翼飛行器憑借其靈活的操控性、較小的地域局限性等優勢,在軍事、民用和科學研究等諸多領域受到了越來越多的關注。目前國內大部分無人機的研究重點在于如何讓飛行器飛的更高更遠,飛行時間更長。而該設計的著重點是飛行器飛得更低更穩。在飛行過程中,飛行器通過超聲波測距技術實現飛行器的近地貼地表飛行,采用梯度下降法對飛行器的姿態進行解算,雙環PID控制,進一步提高了系統的穩定性。結果表明,系統可實現3~50 cm之間超低空近地穩定飛行。
關鍵詞: 四旋翼飛行器; 超低空飛行; 雙環PID; 無人機; 超聲波測距
中圖分類號: TN972+.42?34; TP301.6 文獻標識碼: A 文章編號: 1004?373X(2017)18?0011?04
Research and design of quadrotor based on gradient descent method and double?loop PID
MA Yajie1,2, PENG Panlai1, LIU Guoqing1, JIN Jin1, XU Gaokai1
(1. School of Information Science and Engineering, Wuhan University of Science and Technology, Wuhan 430081, China;
2. Engineering Research Center for Metallurgical Automation and Detecting Technology, Ministry of Education, Wuhan 430081, China)
Abstract: The quadrotor, with its advantages such as agile controllability and small geographical limitation, attracts more and more attention in the fields of military, civilian, scientific research, etc. At present, most researches in China on the unmanned aerial vehicle (UAV) focus on how to make the UAV fly higher, farther and longer. However, the design in this paper aims to make the UAV fly lower and more stably. During the flight, the ultrasonic ranging technology is adopted to make the quadrotor fly at a low altitude near the earth′s surface, the gradient descent method is used to calculate the attitude of the quadrotor, and double?loop PID control is enabled to further improve the system stability. The experimental result shows that the designed quadrotor can fly stably at a super low altitude of 3~50 cm above the earth′s surface.
Keywords: quadrotor; super low altitude flight; double?loop PID; unmanned aerial vehicle; ultrasonic ranging
0 引 言
國內大部分無人機公司研究的重點在于如何讓飛行器飛得更高更遠,飛行時間更長。例如,大疆DJI精靈系列中,第三代升級版的飛行距離比標準版的要遠1 000 m,第三代飛行時間比第二代[1]長10 min。
然而在某些災害現場有些狹小的空間中或者管道中,人工進行災情排查危險且效率低下。本文設計出能在超低空穩定飛行的四旋翼飛行器,利用它進行高效勘察并通過攝像頭實時傳輸視頻數據,還可以通過搭載各類傳感器傳輸其他信息。在某些特殊位置,人員無法抵達,無法將物品進行運送,則可以利用飛行器進行小物件運送。這便是設計這款超低空飛行器的意義所在[2]。
為了實現飛行器的超低空穩定飛行,需解決以下三個方面的問題:姿態解算問題;PID控制器的設計問題;定高精度獲取問題。
姿態解算一直是四旋翼飛行器研究的關鍵問題之一。姿態解算的精度和速度將直接影響飛行控制算法的穩定性、可靠性和實現的難易程度。本文采用基于梯度下降法的飛行器姿態解算[3]。
為了使四旋翼達到控制系統穩、準、快三個性能指標,采用雙環PID控制器,增強了系統的抗干擾性,因為有兩個PID環控制飛行器,它會比單個控制器控制更多的變量,使得飛行器的適應能力更強[4]。
飛行器超低空飛行,對測距精度提出了極大的挑戰。在分析常用的測距傳感器之后,采用定高精度相對較好的超聲波來實現高空測距定高。
4 高度傳感器的選擇
高度數據是小型無人機飛行控制的定高重要參數,飛行器超低空飛行,對測距精度提出了極大的挑戰。低空飛行最大的問題就是面臨復雜的近地環境,而且模糊性大。選擇測距精度較高的傳感器,并利用相關的濾波算法,不僅能夠增加定高的準確度,還能提高飛行器的穩定度。endprint
通過分析常用的測距傳感器,會發現超聲波測距雖然對于較高的高空測距不太準確,但對于超低空的測距則較氣壓計等精確度更高。因此,采用超聲波傳感器來測距,通過濾波算法求出較準確的距離信息。
5 系統仿真與結果
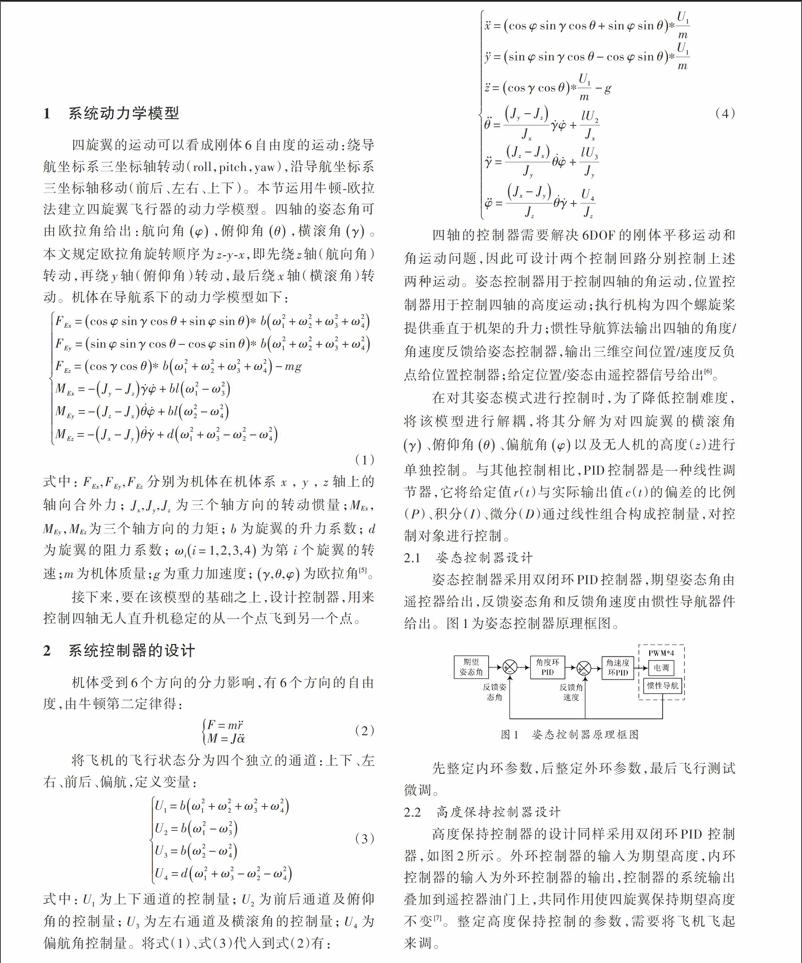
5.1 姿態解算性能比較
對三種姿態解算法進行仿真,如圖4所示,綠色曲線、紅色曲線、藍色曲線分別為梯度下降算法、卡爾曼濾波算法、互補濾波算法得到橫滾角。對比圖中的三組曲線,發現Kalman濾波算法解算得到姿態角曲線毛刺較多,魯棒性較差,容易受到外界影響;互補濾波算法解算得到的姿態角曲線平滑,穩定性較好,但是在曲線波峰與波谷處延時較大;梯度下降算法解算得到的姿態角,響應速度快,動態精度約為2°,為此采用梯度下降算法為姿態解算算法。
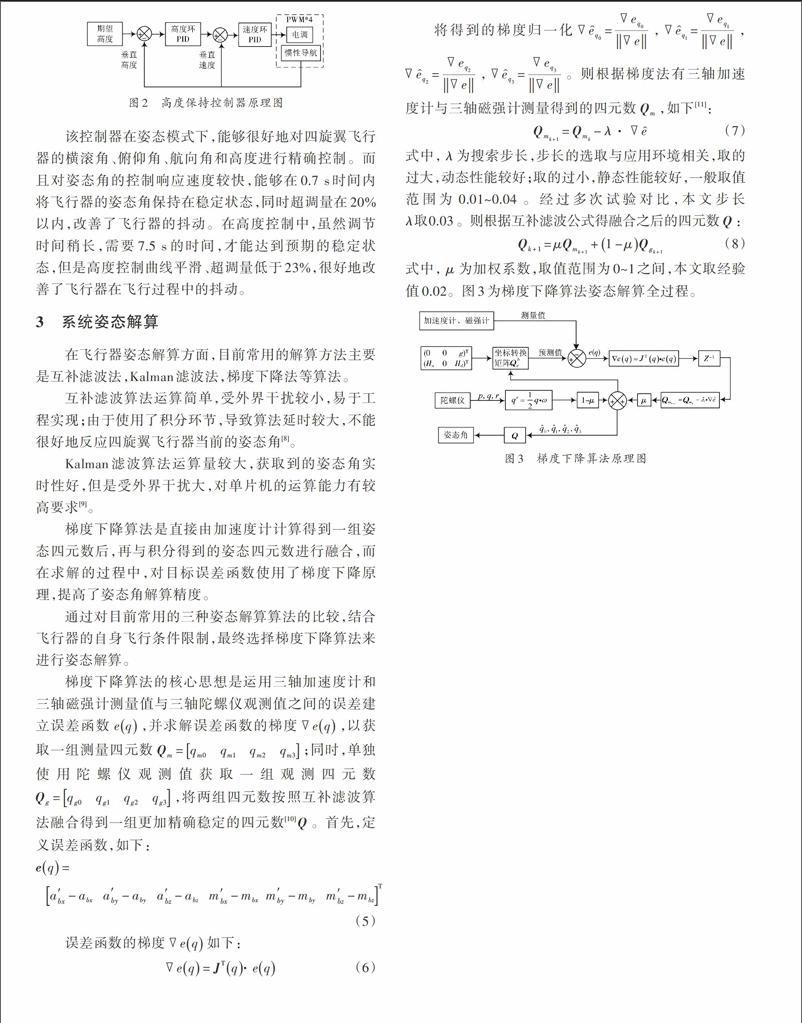
5.2 姿態控制器響應
設置四旋翼的飛行環境為室內無風條件下,讓四旋翼跟蹤遙控器的輸入飛行,采集遙控器的輸入目標姿態角和四旋翼當前的輸出姿態角。圖5是姿態飛行模式橫滾角響應曲線,下面以橫滾角為例分析該控制器效果。
圖5中紅色曲線為目標橫滾角,直接由航模遙控輸入,起始時刻為0;綠色為姿態控制器響應姿態角。對比圖5中兩條曲線,當迅速打桿時,機體能在很短時間內做出反應并到達目標角度;當打桿回中時,機體迅速回到0°并有大約20%超調。這是因為積分飽和,加快了機體的響應速度,同時導致機體回中超調。總體來說,該控制器控制響應速度快,控制精度較好。
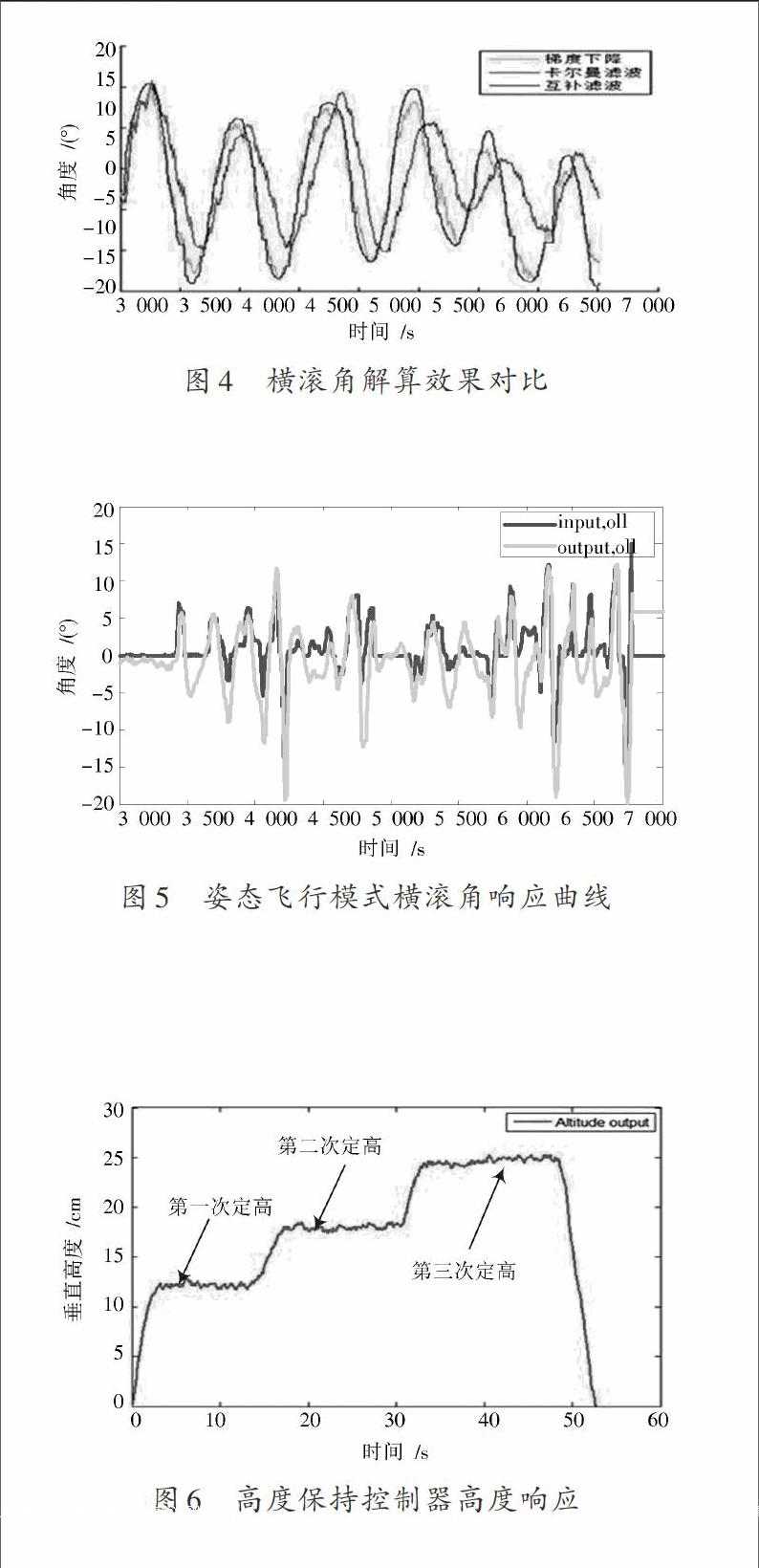
5.3 高度保持控制器響應
讓四旋翼從水平面起飛,飛行大約10 cm高度時切定高模式,讓四旋翼保持高度不變,并多次改變高度值,檢驗定高效果。
觀察圖6中紅色曲線,大體上類似“階梯”狀。在第一個階梯處,四旋翼大概懸停在12.5 cm高度處,穩定懸停大約10 s,垂直高度波動1 cm以內;在第二次、第三次的階梯處,四旋翼定高表現與第一次類似,高度保持穩定,最大波動誤差1.5 cm以內,表明定高效果較好。
5.4 超聲波對距離的實際測量
通過上位機軟件可以實時讀取到飛行器上的超聲波測得與地面的距離,可觀察到飛行器能較穩定地定在空中3~50 cm之間,超聲波測距的效果圖如圖7所示。
6 結 論
針對飛行器市場上尚未開發的領域,本文完成了以下工作:超低空飛行,系統可實現最低3 cm超低空飛行,采用較高精度傳感器和基于梯度下降法的飛行器姿態解算法;穩定飛行,采用基于雙閉環PID的反饋控制。
在超低空的飛行領域,超聲波定高較氣壓計定高具有更大的優勢。在方案論證中,通過對比相關性能后,發現超聲波測距技術具有體積小、重量輕、功耗低及精度高的優勢。通過對比常用的飛行器姿態解算算法,在此選擇梯度下降算法。梯度下降的數據融合算法能顯著降低對處理器速度和精度的要求,能有效融合航姿測量單元的傳感器數據,提高小型四旋翼飛行器的姿態測量精度。雙閉環級PID 控制器較單級PID 控制器而言,能控制更多的系統變量,使系統的適應性更強,增強系統的穩定性,提高系統的魯棒性。
參考文獻
[1] 李堯.四旋翼飛行器控制系統設計[D].大連:大連理工大學,2013.
[2] 李繼寧,張鐵民,彭孝東,等.四旋翼飛行器農田位置信息采集平臺設計與實驗[J].農業機械學報,2013,44(5):202?206.
[3] 江杰,馮旭光,蘇建彬.四旋翼無人機仿真控制系統設計[J].電光與控制,2015,22(2):27?30.
[4] 唐懋.基于Arduino兼容的Stm32單片機的四旋翼飛行器設計[D].廈門:廈門大學,2014.
[5] 龐慶需.四旋翼飛行器設計與穩定控制研究[D].合肥:中國科學技術大學,2011.
[6] JAFARI H, ZAREH M, ROSHANIAN J, et al. An optimal guidance law applied to quadrotor using LQR Method [J]. Transactions of the Japan Society for Aeronautical & Space Sciences, 2010, 53(179): 32?39.
[7] ZHAO S, AN H, ZHANG D, et al. A new feedback linearization LQR control for attitude of quadrotor [C]// International Conference on Control Automation Robotics & Vision. [S.l.: s.n.], 2015: 1593?1597.
[8] 白永強,劉昊,石宗英,等.四旋翼無人直升機魯棒飛行控制[J].機器人,2012,34(5):519?524.
[9] 賀翔,陳奕梅,郭建川,等.四旋翼無人飛行器雙閉環PID控制器設計[J].制造業自動化,2015,37(18):23?26.
[10] 段世華.四旋翼飛行器控制系統的設計和實現[D].成都:電子科技大學,2012.
[11] 楊萌.四旋翼飛行器控制系統設計與研究[D].青島:青島理工大學,2015.endprint
猜你喜歡
電腦知識與技術(2016年28期)2016-12-21 12:21:32
電子技術與軟件工程(2016年19期)2016-12-19 18:28:28
新教育時代·教師版(2016年27期)2016-12-06 18:14:59
中國科技縱橫(2016年17期)2016-11-30 11:51:57
農機使用與維修(2016年10期)2016-11-10 09:45:55
人間(2016年26期)2016-11-03 17:52:40
中國科技博覽(2016年22期)2016-11-01 18:10:31
科技視界(2016年22期)2016-10-18 14:30:27
企業導報(2016年9期)2016-05-26 20:58:26
