基于單神經元算法的內嵌式永磁同步電機智能驅動控制*
2017-11-07 01:59:01邱丹,陶誠
電機與控制應用 2017年10期
邱 丹, 陶 誠
(1. 鐘山職業技術學院,江蘇 南京 210049;2. 中國電科第二十八研究所,江蘇 南京 210000)
基于單神經元算法的內嵌式永磁同步電機智能驅動控制*
邱 丹1, 陶 誠2
(1. 鐘山職業技術學院,江蘇 南京 210049;2. 中國電科第二十八研究所,江蘇 南京 210000)
基于人工神經網絡的內嵌式永磁同步電機(IPMSM)智能驅動控制性能要明顯優于傳統控制方法,但是存在計算量大和離線訓練時間長的問題。針對該問題,提出了一種基于單神經元算法的IPMSM智能驅動控制策略。闡述了永磁同步電機的數學模型及電流轉矩控制規律;并基于單神經元的控制原理,推導了驅動控制律,由于采用的是單神經元結構并設置了迭代算法的邊界,因此達到了計算量減小和訓練較少的效果。最后,搭建了小功率電機驅動試驗平臺開展了試驗研究,并通過與傳統PID控制的對比試驗,驗證了新型控制器的性能。
內嵌式永磁同步電機;人工神經網絡;智能控制;電機控制;訓練
0 引 言
內嵌式永磁同步電機(Interior Permanent Magnet Synchronous Motor,IPMSM)具有功率密度高、使用壽命長、轉速轉矩特性好和動態響應快等優點,目前廣泛應用于電動汽車和風力發電等各種工業領域[1-6]。
IPMSM在基于速度控制的高性能驅動應用中需要快速響應速度指令,同時在各種未知擾動的條件下保持工作點的精度。傳統的PI或PID速度控制器已具備較好的控制性能。但是由于IPMSM的運行很容易受到轉子磁場飽和度及電樞反應的影響,從而在工作點范圍內的電機參數變化敏感,使得傳統的固定增益的PI或PID控制器性能下降[7-8]。為了增強轉速控制性能,各種智能控制方案被提出,其中具有代表性的包括模糊控制器、滑模控制器、神經網絡控制器、基于遺傳算法的控制器等[9-18]。不同的方案具有不同的優勢,但一個共性的缺點就是實時運算量較大,不利于實際推廣應用。
本文設計了一種基于單神經元(Single Artificial Neuron,SAN)算法的IPMSM智能驅動控制方案。其能精確地實現IPMSM轉速控制,并對負載變化和參數攝動不敏感;由于是單個神經元算法而不是神經網絡算法,因此只需要少量的實時訓練即可,然后在每次迭代后自適應地修改神經元映射結構的相關參數,進而實現速度精準控制,并確保系統穩定性;同時,結合最大轉矩電流比(Maximum Torque Per Ampere,MTPA)算法,提高了電機運行效率。最后搭建了電機試驗平臺,通過試驗對新型智能控制方法的有效性進行了驗證。
1 IPMSM的數學模型和參數
經典的IPMSM數學模型可以采用同步旋轉坐標系下的dq方程進行描述如下[6]:
式中:ud、id,uq、iq——d軸和q軸定子電壓電流;
Ld、Lq——d軸和q軸定子電感;
rs——定子每相電阻;
ωr——轉子角速度;
Te和TL——電磁轉矩和負載轉矩;
Jm——轉動慣量;
p——電機極對數;
ψf——永磁磁鏈;
p——微分算子;
Bm——電機摩擦因數。
本文中后續用于試驗的電機相關參數如表1所示。

表1 IPMSM相關參數
2 IPMSM的電流轉矩控制
從式(3),即IPMSM的電磁轉矩方程可以看出,電磁轉矩與d軸和q軸的電流之間存在一個非線性的關系。為了將這種非線性關系融入到實際的IPMSM驅動控制中,MTPA算法被提出來,其實現了在最小定子電流下的最大電機轉矩[19-21]。
將式(3)對q軸電流iq求微分,并令其為0,可以得到單位電流的最大轉矩,此時iq與id的關系式為
將式(4)代入式(3),可得到iq和Te的非線性關系:
Te=
在IPMSM實時驅動控制器設計中,用式(4)和式(5)來實現電流轉矩控制將導致計算量大,實時性降低。因此將式(4)進行對零的泰勒級數展開,同時將表1中的電機參數代入,得到簡化后的數值關系為
將式(6)和電機參數代入式(3)可以得到iq和Te的近似線性數值關系:
上述式(6)和式(7)一起構成了對IPMSM的近似MTPA控制實現。
3 基于SAN的IPMSM控制器設計
3.1SAN控制原理
IPMSM的動態方程式(1)和式(2)可以重新寫為

負載可用非線性機械特性方程進行建模和描述[8]:
式中:A、B和C是任意常數。
將式(10)代入式(9),可以得到一個時域下的單輸入單輸出系統:
下面進行小信號分析,考慮Te的一個小量增加ΔTe,則將導致ωr的小量增加Δωr,因此式(11)可寫為
化簡后得
對式(13)進行離散化處理,可以得到IPMSM帶非線性負載時的離散小信號數學模型:

進而有
其中: Δe(n)=Δωr(n)-Δωr(n-1),
Δωr(n)=e(n)=ωr*(n)-Δωr(n)。
式中: Δe(n)——轉速差;
Δωr——當前參考轉速和實際轉速差的采樣值;
Δωr(n-1)——前一個步長的轉速差采樣;
ωr(n)——實際轉速的當前步長采樣值;

ts——采樣時間間隔;
f()——非線性函數關系。

3.2參考轉矩生成
將式(2)離散化重新寫為如下表達式:
其中:Jm和Bm是已知參數,而ωr(n)為當前步長的轉速值,可以通過在電機上安裝位置傳感器獲取,而pωr(n)=[ωr(n)-ωr(n-1)]/ts是轉子速度的差分量。
式(16)意味著若已知當前步長的電磁轉矩Te(n),則可以通過表達式直接計算出當前步長的負載轉矩TL(n);而Te(n)可以通過離散化后的式(3)得到,具體為

式(17)中,iq(n)和id(n)可通過旋轉坐標變換從ia(n)、ib(n)和ic(n)中計算出來,而后者可以通過設置好的電流傳感器進行AD采樣得到,極對數p和ψf也是已知的,電機參數Ld和Lq假設是恒定的,那么Te(n)就可以計算得到。進一步代入式(16)便生成了參考轉矩,具體如下:

其中: pωr(n)=[ωr(n)-ωr(n-1)]/ts
式中: pωr(n)——轉子速度的差分量;
ωr(n)——實際轉速的當前步長采樣值。
參考轉矩的生成是以電機參數Ld和Lq假設恒定為前提的,但是該假設是不符合實際電機運行工況的,此參考轉矩指令僅在作為神經元映射的實時訓練時使用,從而設置驅動控制的穩定邊界。
3.3基于SAN的轉速控制器


圖1 IPMSM驅動控制器的SAN模塊

圖2 IPMSM驅動控制器框圖



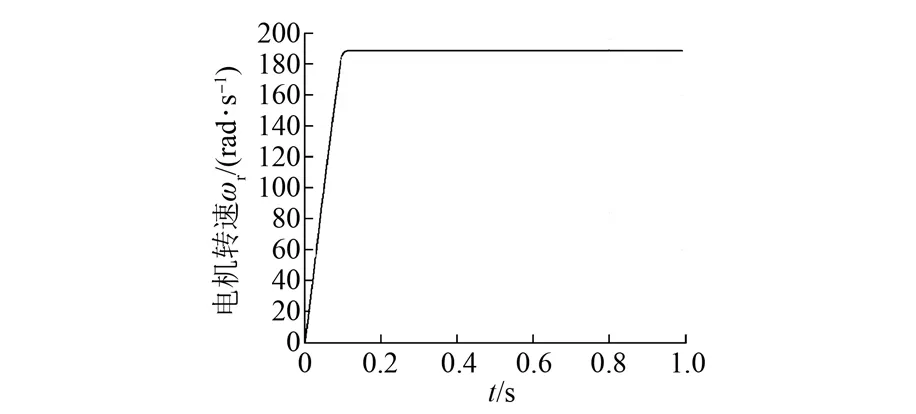
圖3 SAN控制器作用下的空載起動轉速曲線

圖4 無參考轉矩邊界時的SAN控制器作用下的起動和突加負載時的轉速曲線
4 試驗驗證
為了檢驗前述所提出的基于單神經元算法的新型IPMSM驅動控制方案,搭建了小功率IPMSM驅動試驗平臺開展了試驗研究。其中所采用的IPMSM電機參數如前述表1所示。控制器核心數字芯片采用TI公司的DS1102,其實時性較好,采樣頻率設置為5 kHz,此外控制器還有轉速編碼電路和結合霍爾傳感器的AD采樣電路,控制器最終輸出PWM脈沖到變頻器驅動電機運行。為了進行對比試驗驗證,還應用了傳統的PID控制器,其參數也經過了優化設計以平衡超調量、上升時間和調節時間等性能指標。
如圖5所示為IPMSM在基于SAN的驅動控制下,輕載時速度指令階躍變化時的試驗波形。其中圖5(a)所示為IPMSM的轉速變化曲線,圖5(b)所示為轉速變化時的電機A相電流波形。從轉速波形可以看出,在控制器作用下,電機在轉速指令階躍變化后能迅速的對其跟蹤和準確的保持。從相電流波形可以看出,其相電流幅值大小沒有顯著變化,因為負載轉矩是恒定的,只是電流頻率根據轉速變化而調整。

圖5 IPMSM在SAN控制器作用下的轉速調節試驗波形
如圖6所示為IPMSM在基于SAN的驅動控制下,在空載額定轉速下突加2 N·m的額定負載轉矩時的試驗波形。其中圖6(a)所示為IPMSM的轉速曲線,可以看出,突加負載轉矩后轉速波動很小,轉速控制性能較優,而從圖6(b)可以看出A相電流幅值在突加負載轉矩后迅速上升,響應較快,而頻率保持不變。
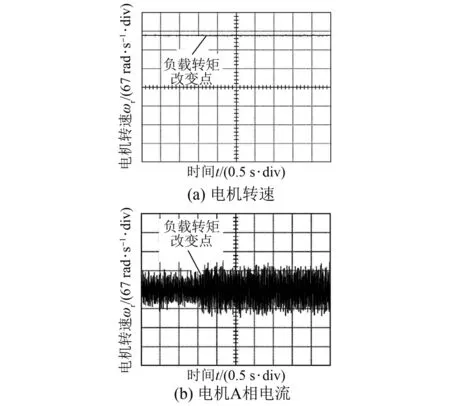
圖6 IPMSM在SAN控制器作用下的突加負載轉矩試驗波形
如圖7所示為IPMSM在PID控制器作用下的試驗波形。其中圖7(a)所示為IPMSM在空載時上升至額定轉速的曲線,對比圖5(a)可以看出,傳統PID控制時的轉速響應要慢于SAN控制,且超調量大。圖7(b)所示為IPMSM在額定轉速時突加2 N·m的額定負載轉矩時的轉速波形,對比圖6(a)可以看出,傳統PID控制時的突加負載轉矩擾動的轉速波動要大于SAN控制。因此驗證了新型SAN控制的優越性。

圖7 IPMSM在PID控制器作用下的試驗波形
5 結 語
本文對基于單神經元算法的IPMSM智能轉速控制方案進行了研究和設計,具體的結論如下:
(1) 對比試驗研究表明基于實時訓練的SAN控制器用于控制IPMSM具有良好的轉速響應和負載動態性能,并且明顯地優于傳統的PID控制器。
(2) 與其他智能控制算法相比,基于SAN的算法由于采用的是單神經元映射結構,計算量小,因而不需要高性能的數字芯片作為物理基礎,成本低,且避免了神經元網絡算法所需要的較長時間的離線訓練,工程實現性好。
[1] 盛義發,喻壽益,桂衛華,等.軌道車輛用永磁同步電機系統弱磁控制策略[J].中國電機工程學報,2010,30(9): 74-79.
[2] HANAN M H,黃蘇融,高瑾,等.基于交叉耦合效應的車用內置式永磁電機轉子位置估計[J].中國電機工程學報,2012,32(15): 124-133.
[3] 朱永彬,林珍.場路結合電動汽車用永磁同步電機設計分析[J].電機與控制應用,2016,43(2): 60-66.
[4] 符曉玲,劉旭東.基于反饋線性化和預測控制方法的電動汽車用IPMSM速度控制[J].電機與控制應用,2016,43(2): 67-71.
[5] 李和明,董淑惠,王毅,等.永磁直驅風電機組低電壓穿越時的有功和無功協調控制[J].電工技術學報,2013,28(5): 73-81.
[6] 肖園園,李欣然,張元勝,等.直驅永磁同步風力發電機的等效建模[J].電力系統及其自動化學報,2013,25(1): 12-28.
[7] RAHMAN M A, ZHOU P. Field circuit analysis of brushless permanent magnet synchronous motors[J]. IEEE Transactions on Industry Electronics,1996,43(2): 256-267.
[8] BUTT C B, HOQUE M A, RAHMAN M A. Simplified fuzzy logic based MTPA speed control of IPMSM drive[J]. IEEE Transactions on Industry Applications,2004,40(6): 1529-1535.
[9] 吳荒原,王雙紅,辜承林,等.內置式永磁同步電機改進型模糊邏輯控制器設計[J].中國電機工程學報,2013,33(33): 68-75.
[10] 徐建英,谷偉志,吳婷.永磁同步電動機的哈密頓最優控制系統[J].微特電機,2016,44(1): 43-47.
[11] 張興華,唐其太.考慮參數和負載不確定性的內置式永磁同步電機自適應反步控制[J].控制與決策,2016,31(8): 1509-1512.
[12] 嚴衛生,林海,丁明,等.基于模糊邏輯控制的永磁同步電動機SVM-DTC系統仿真[J].微特電機,2008,36(11): 35-38.
[13] 徐靜,段芳,江天炎.模糊MRAS方法在永磁同步電機無速度傳感器控制系統中的應用[J].電機與控制應用,2015,42(12): 55-58.
[14] 張國強,王高林,倪榮剛,等.基于自適應線性神經元濾波的內置式永磁電機轉子位置觀測器[J].電工技術學報,2016,31(6): 47-54.
[15] NAMUDRI C, SEN P C. A servo-control system using a self-controlled synchronous motor with sliding mode controller[J]. IEEE Transactions on Industry Applications,1987,23(2): 283-295.
[16] RAHMAN M A, HOQUE M A. On-line adaptive artificial neural network based vector control of permanent magnet synchronous motors[J]. IEEE Transactions on Energy Converters,1998,13(4): 311-318.
[17] YI Y, VILATGAMUWA D M, RAHMAN M A. Implementation of artificial neural network based controller for an interior permanent magnet motor drive[J]. IEEE Transactions on Industry Applications,2003,39(1): 96-104.
[18] UDDIN M N, ABIDO M A, RAHMAN M A. Laboratory implementation of an artificial neural network for online tuning of a genetic algorithm based PI controller for IPMSM drive[C]∥ IEEE Proceedings of the Power Conversion Conference, Montreal, QC, Canada: IEEE, 2002: 16-20.
[19] BOSE B K. A high performance inverter-fed drive system of an interior permanent magnet synchronous machine[J]. IEEE Transactions on Industry Applications,1988,24(6): 987-997.
[20] MORIMOTO S, SANDA M, TAKETA Y. Wide-speed operation of interior permanent magnet synchronous motors with high-performance current regulator[J]. IEEE Transactions on Industry Applications,1994,30(4): 920-926.
[21] HOQUE M A, BUTT C, RAHMAN M A. A novel approach for MTPA speed control of IPMSM drive[C]∥ IEEE 2nd International Conference on Electric Computation Engineering, Dhaka, Bangladesh, IEEE, 2002: 336-339.
IntelligentDriveControlofInteriorPermanentMagnetSynchronousMotorBasedonSingleArtificialNeuronAlgorithm
QIUDan1,TAOChen2
(1. Zhongshan Vocational College, Nanjing 210049, China;2. The 28th Research Institute of China Electronics Technology Group Corporation, Nanjing 210000, China)
The performance of the controller for interior permanent magnet synchronous motor based on artificial neural network is superior to the traditional control method, but it has the problems of large amount of computation and long training time. Aiming at it, an intelligent drive control of interior permanent magnet synchronous motor based on a single artificial neuron algorithm was presented. At first, the mathematical model of the motor and the principles of the current torque control law had been described. Then, the driving controller for the motor based on single artificial neuron had been designed, and the computation and training time had been reduced due to the use of the single neuron and set the iterative boundary. Finally, a small power motor drive test platform was built, and the performance of the new controller was verified by comparing with the traditional PID control.
interiorpermanentmagnetsynchronousmotor(IPMSM);artificialneuralnetwork;intelligentcontrol;motorcontrol;train
江蘇省自然科學基金面上項目(BK20161468):透平機械用多相高速永磁電機驅動關鍵技術的研究;江蘇省高等學校大學生實踐創新訓練計劃項目(201312922011X):基于數字磁羅盤和角速度陀螺的智能航向系統設計
邱 丹(1978—),女,講師,碩士,研究方向為電氣傳動和智能控制。
陶 誠(1980—),男,高級工程師,博士,研究方向為電力系統智能化。
TM 301.2
A
1673-6540(2017)10- 0036- 06
2016 -11 -09
