電動汽車永磁同步電機滑模低速控制*
2017-11-07 01:58:56祁曉野
電機與控制應用 2017年10期
郭 棟, 吳 琦, 祁曉野
(1. 遼寧工業大學 電氣工程學院,遼寧 錦州 121001;2. 北京航空航天大學 流體傳動與控制技術研發中心,北京 100191)
電動汽車永磁同步電機滑模低速控制*
郭 棟1,2, 吳 琦1, 祁曉野2
(1. 遼寧工業大學 電氣工程學院,遼寧 錦州 121001;2. 北京航空航天大學 流體傳動與控制技術研發中心,北京 100191)
針對采用永磁同步電機id=0矢量控制調速的電動汽車電機驅動控制系統,為了改善其抗負載擾動能力,并且當電動汽車處于低速運行時,能夠輸出大轉矩,將滑模變結構控制中的變指數趨近律進行改進,設計了一種滑模速度控制器。為了減小滑模變結構控制的抖振問題,引入飽和函數來代替符號函數,同時考慮到滑模速度控制器中存在滯后問題,將飽和函數與經過積分環節后得到的信號相乘,在提高了響應速度的同時增強系統的抗擾動能力。經過仿真驗證,不同負載工況下,滑模速度控制器具有較強的魯棒性和抗擾動能力,滿足電動汽車低速運行工況下輸出大轉矩的要求。
滑模變結構控制;永磁同步電機;電動汽車
0 引 言
電機驅動控制系統是電動汽車的心臟,永磁同步電機(Permanent Magnet Synchronous Mortor,PMSM)因其高功率密度、高效率等優勢在電動汽車上得到了廣泛應用。由于PMSM是一個含有非線性環節以及強耦合的多變量系統,雖然PI控制在一定范圍內可以達到控制要求[1-2],但應用于電動汽車的電機控制時,由于電動汽車低速運行時常常處于如爬坡、頻繁地起動停止等復雜運行工況,而PI控制達不到控制性能的要求。為使電動汽車電機驅動系統對負載的抗擾動能力得到改善,并且在低速運行時可以輸出大轉矩,許多現代控制理論被應用到PMSM調速系統中[3-8], 如模糊控制、神經網絡控制和滑模變結構控制等。但是模糊控制的設計尚缺乏系統性,神經網絡控制器的理論和學習算法還有待于進一步地完善和提高,而滑模變結構控制對擾動和不確定參數具有較強的魯棒性,系統的結構根據系統當前狀態有目的地實時變化,是一種非常特殊的非線性控制方法,且響應速度快。因此,本文將滑模變結構控制應用于電動汽車的電機驅動控制系統,使其能夠滿足低速運行時的工況要求和性能指標。
文獻[9]針對PMSM,采用了一種改進的指數趨近律,具有抖振小、速度響應快、超調量小等優點,對于PMSM最大轉矩電流比(Maximum Torque Per Ampere,MTPA)控制調速系統,文獻[10]對滑模變結構控制進行了改進,提高了對參數的自適應能力,增強了對負載抗擾動能力。文獻[11]采用了一種指數趨近律,該控制器對轉速實現了無超調跟蹤,對參數擾動具有較好的魯棒性。文獻[12]采用了一種新型冪次趨近律,并應用于PMSM的矢量控制系統,其控制精度和調速性能良好,可以很好地抑制外部擾動。這些文獻中設計的控制器中包含的積分項,雖然可以削弱抖振現象以及消除系統的穩態誤差,但并未考慮到引入積分環節后導致的滯后問題。
本文采用飽和函數代替符號函數解決滑模變結構控制中的抖振問題,同時采用飽和函數與經過積分環節運算后得到的信號相乘的方法解決控制器中引入積分環節導致的滯后問題。經過仿真驗證,所設計的控制器提高了系統的魯棒性,具有良好的動態、靜態性能。
1 PMSM數學模型
本文研究中對PMSM作如下假設:
(1) 電機的轉子磁場以正弦波的方式分布于氣隙空間中;
(2) 感應電動勢為正弦波;
(3) 磁路為線性,忽略鐵心飽和、鐵心渦流以及磁滯損耗的影響。
采用id=0矢量控制策略,PMSM在d-q旋轉坐標系下的電壓方程為[13]
式中:ud、uq——d、q軸電壓;
id、iq——d、q軸電流;
Ld、Lq——d、q軸電感;
ψf——永磁體磁鏈;
Rs——定子相電阻;
ω——轉子電角速度。
PMSM的電磁轉矩方程為
PMSM的運動方程為
式中:Te——電磁轉矩;
TL——負載轉矩;
p——PMSM的極對數。
2 速度控制器的設計
2.1狀態空間方程的建立
選取PMSM控制系統狀態變量為
式中:ω*——給定轉速;
ω——實際轉速。
結合式(2)~式(4)可得

2.2滑模面的選取
為滿足使系統無超調達到穩定的要求,選取一階線性滑模面s=cx1+x2(c>0,為待設計參數),并對其求導,得
2.3趨近律的選取
趨近律控制方法可以保證趨近運動的動態品質,使控制系統獲得良好的控制效果。由于指數趨近律只能在原點附近來回抖振,變速趨近律則會趨近并穩定于原點,而變指數趨近律[10]是將指數趨近律與變速趨近律相結合,吸收二者的優點,其表達式為
式中:q——指數趨近律系數,q>0;
ε|x1|——變速趨近律系數,ε>0。
由式(8)可知,滑模面外的軌跡,是按指數增長的方式向滑模面運動的;當快要到達滑模面時,變速項-ε|x1|sgn(s)起主要作用;當到達滑模面時,因為轉速誤差和滑模面運動過程的關系,會導致運動幅度逐漸減小,趨近于原點。
2.4穩定性分析
根據Lyapunov理論,滑模變結構控制的存在性和可達性滿足如下關系:
式中:V(x)——Lyapunov函數,V(x)=(1/2)s2;
s≠0。
將式(8)代入式(9),得
無論s取何值,滿足存在性和可達性條件,即式(10)始終成立。
2.5控制律的求取
根據選取的趨近律并結合式(7)得控制器輸出的表達式為
從而可得q軸電流的給定值為

2.6改進的控制律
因為sgn(s)函數是一種不連續型函數,故導致系統出現抖振現象。為了削弱系統的抖振問題,這里引入飽和函數sat(s,δ)代替式(12)中sgn(s)函數,由于sat(s,δ)·s與sgn(s)·s的符號特性相同,故根據式(10)滿足穩定性條件。
飽和函數sat(s,δ)的表達式為
其中,δ為較小的正常數,但不宜過小。如果δ取值太小,則會導致抖振問題。
所以,
另外,為了解決積分環節引起的滯后問題,本文將控制律作了改進,即
3 仿真結果與分析

圖1 系統仿真模型結構框圖

本文研究對象為:價格在5~8萬元的電動汽車。通過查找相關方面的資料,選用的PMSM參數如表1所示。

表1 PMSM參數
3.1不同負載起動工況分析
為了驗證本文所設計的滑模速度控制器的控制性能,設計了以下三種工況的仿真來驗證,即輕載起動、額定負載起動和重載起動。
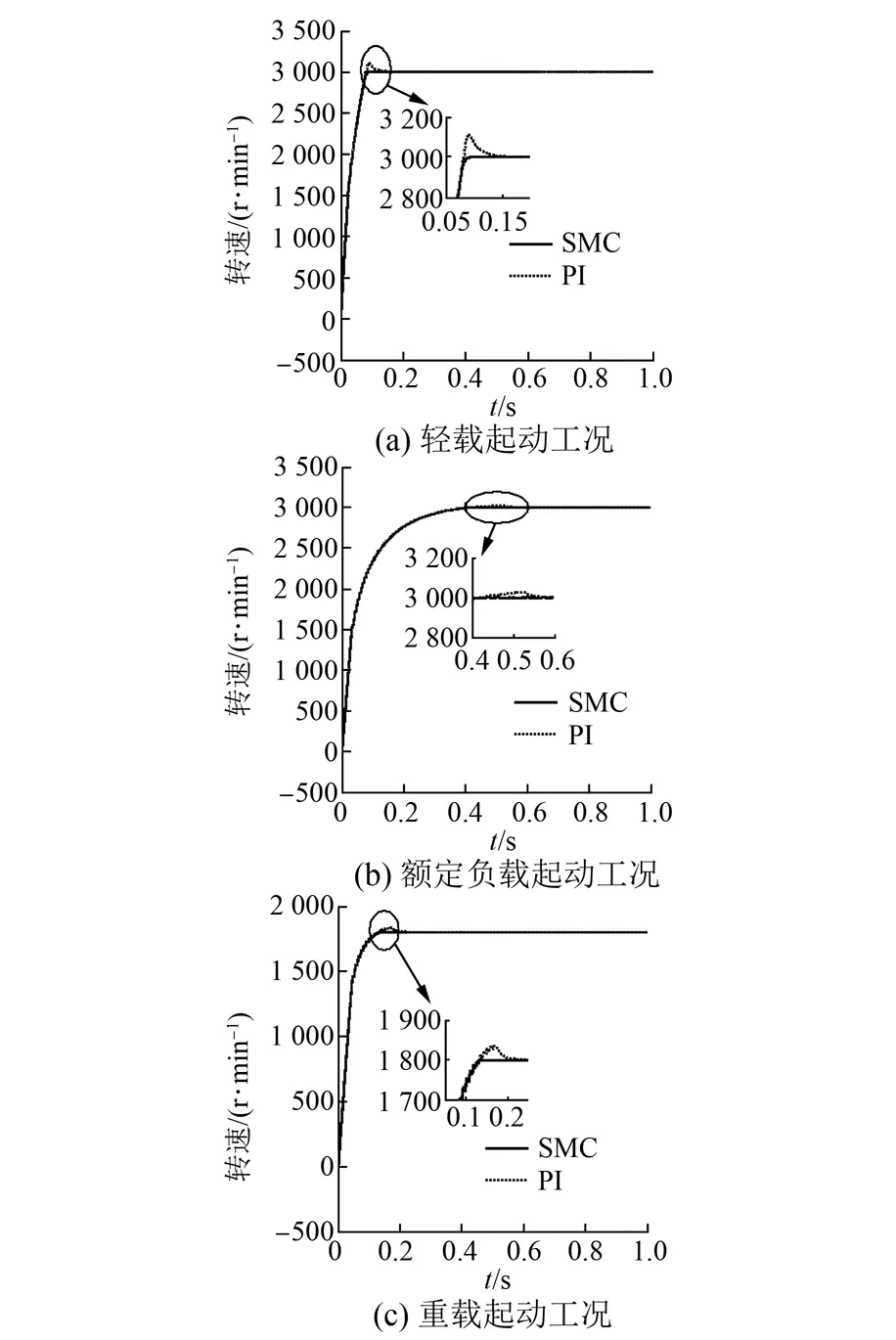
圖2 不同負載起動工況下的速度響應曲線
在t=0 s,轉速為3 000 r/min,起動轉矩分別為5、24、40 N·m時,各種工況下傳統PI控制與滑模變結構控制的速度響應曲線如圖2所示。其中,24 N·m是額定轉矩;當轉矩為40 N·m時,電機轉速僅為1 800 r/min,達不到3 000 r/min。
從圖2可以得到表2中的數據。經分析知所設計的滑模速度控制器響應速度快,響應曲線很平滑、無超調,因此,采用滑模控制得到的控制效果更佳,并且縮短了響應時間。

表2 不同工況不同控制策略下性能參數
3.2不同負載干擾工況分析
在額定負載起動的情況下,針對不同的負載干擾情況進行仿真,驗證控制器的控制性能。

圖3 不同干擾工況下的速度響應曲線
在t=0 s、轉速為3 000 r/min、起動轉矩為24 N·m的起動條件下,當t=0.6 s時,設置以下三組干擾轉矩和轉速,即:12 N·m和3 000 r/min、48 N·m和1 500 r/min、72 N·m和1 000 r/min。此時,各工況下傳統PI控制與滑模變結構控制的速度響應曲線如圖3所示。
從圖3可以得到表3中的數據,經分析知與PI控制相比,所設計的滑模速度控制器對負載干擾有更好的抑制能力,提高了系統的魯棒性。
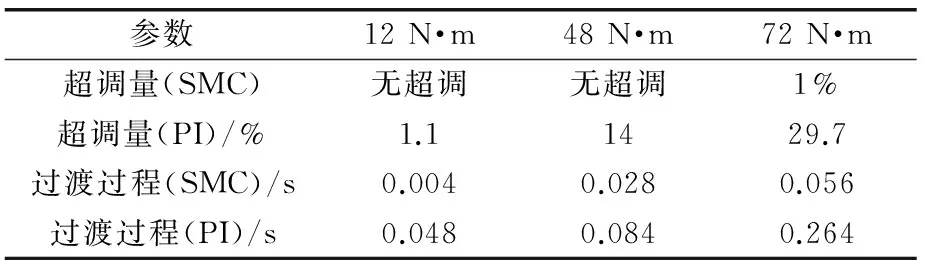
表3 突加干擾不同控制策略下性能參數
3.3改進的控制律的有效性分析
在t=0 s、轉速為3 000 r/min、起動轉矩為5 N·m時,控制律表達式(15)中積分環節后的信號與飽和函數是否相乘的速度響應曲線,如圖4所示。

圖4 改進的控制律速度響應曲線
由圖4可知,當滑模控制中參數都設定為c=100、ε=10、q=50時,將飽和函數與經過積分環節得到的信號相乘,采用這種方法設計的速度控制器控制性能更好、響應速度快、穩定性好;而沒有與飽和函數相乘的方法,響應有一定的超調,約為4.4%。但將參數由c=100改為c=80時,控制器的調節時間較慢。因此,將飽和函數與經過積分環節得到的信號相乘的控制方法可以很好地解決積分環節引起的滯后問題。
4 結 語
本文將改進的變指數趨近律的滑模變結構控制策略應用于電動汽車PMSM的id=0矢量控制調速系統,設計了PMSM的滑模速度控制器。在控制方法中,采用飽和函數代替符號函數,減弱了滑模變結構控制的抖振現象;并且將飽和函數與經過積分環節得到的信號相乘,在一定程度上,解決了積分環節引起的滯后問題。仿真結果表明,本文所設計的PMSM滑模速度控制器改善了電機驅動控制系統的抗負載擾動能力,提高了系統的魯棒性,滿足了電動汽車低速運行時輸出大轉矩的工況要求,同時說明了本文所提出的控制策略具有可行性和優越性。
[1] 孫強,程明,周鶚,等.新型雙凸極永磁同步電機調速系統的變參數PI控制[J].中國電機工程學報,2003,23(6): 117-123.
[2] LAI C K, SHYU K K. A novel motor drive design for incremental motion system via sliding-mode control method[J]. IEEE Trans on Industrial Electronics, 2005,52(2): 499-507.
[3] BOSSANYI E A. GH bladed theory manual[R]. UK-Bristal: Grand Hassan and Partner Limited,2009: 13-36.
[4] MOHAMED A R I. Adaptive self-tuning speed control for permanent-magnet synchronous motor drive with dead time[J].IEEE Transactions on Energy Conversion,2006,21(4): 855-862.
[5] SHEN Y X, WU D H, JI Z C. Model reference fuzzy adaptive control of permanent magnet synchronous motor[C]∥ Proceeding of the Chinese Control Conference, 2006: 1522-1527.
[6] EL-SOUSY F F M. High-performance neural-network model-following speed controller for vector-controlled PMSM drive system[C]∥ IEEE International Conference on Industrial Technology, ICIT’ 04, 2004: 418-424.
[7] 李晨丹,黃文新.基于遺傳算法的永磁同步電動機矢量控制系統的優化設計[J].微電機,2012,45(5): 73-76.
[8] 龔賢武,徐淑芬,張麗君,等.永磁同步電機模糊自適應補償速度控制系統[J].計算機仿真,2014,31(1): 356-360.
[9] 胡耀華,劉闖,寧銀行.永磁同步電機改進型指數趨近率滑模控制[J].微電機,2012,45(8): 54-57.
[10] 金寧治,王旭東,李文娟.電動汽車PMSM MPTA控制系統滑模速度控制[J].電機與控制學報,2011,15(8): 52-58.
[11] 張宏達,賈貴璽,郭錦波,等.永磁同步電機的趨近律滑模控制[J].重慶理工大學學報(自然科學),2015,29(3): 89-94.
[12] 劉慶華,呂永健,陽杰.電動汽車PMSM滑模變結構控制[J].計算機仿真,2015,32(12): 129-132.
[13] 張曉光,趙克,孫力,等.永磁同步電機滑模變結構調速系統動態品質控制[J].中國電機工程學報,2011,31(15): 47-52.
SlidingModeLowSpeedControlofPMSMforElectricVehicle*
GUODong1,2,WUQi1,QIXiaoye2
(1. School of Electrical Engineering, Liaoning University of Technology, Jinzhou 121001, China;2. R&D Centre of Fluid Power Transmission & Control Technology, Beihang University, Beijing 100191, China)
Aiming at the motor drive control system of electric vehicle for using permanent magnet synchronous motor with vector control, in order to improve its capability of resisting load disturbance, and when the electric vehicle was running at low speed, it could output large torque. A sliding mode speed controller was designed to improve the exponential reaching law of sliding mode variable structure control. In order to reduce chattering of the sliding mode variable structure control, the saturation function was introduced instead of the sign function. At the same time, considering the hysteresis in sliding mode speed controller, the saturation function and the integral signal are multiplied, so that the response speed could be improved and the disturbance rejection capability could be enhanced. Simulation results showed that when the load was changed, the sliding mode speed controller had strong stability, which could made the electric vehicle output large torque at low speed.
slidingmodevariablestructurecontrol;permanentmagnetsynchronousmotor(PMSM);electricvehicle
國家自然基金項目(51275021);遼寧省自然科學基金指導計劃項目(201602370);遼寧省教育廳科學研究一般項目(L2015229)
郭 棟(1976—),男,副教授,研究方向為電機驅動與控制、液壓伺服控制、嵌入式系統設計。
吳 琦(1990—),男,碩士研究生,研究方向為現代電力電子應用技術。
祁曉野(1961—),男,副教授,研究方向為液壓伺服控制、電機驅動與控制。
TM 301.2
A
1673-6540(2017)10- 0119- 05
2016 -12 -20
