基于IGS數據的電離層VR模型構建研究*
2017-11-20 10:45:20楊曉云劉代志何恒侯維君李義紅
現代防御技術 2017年5期
楊曉云,劉代志,何恒,侯維君,李義紅
(火箭軍工程大學,陜西 西安 710025)
?空天防御體系與武器
基于IGS數據的電離層VR模型構建研究*
楊曉云,劉代志,何恒,侯維君,李義紅
(火箭軍工程大學,陜西 西安 710025)
全球電離層模型的構建是描述地球近地空間環境的重要環節。IGS提供了全球電離層圖GIMs,其時間和空間的分辨率較低。研究了BERN程序代碼的GIMs插值方法和格網插值算法,對比了最鄰近插值、三次樣條插值和雙線性插值不同插值算法間的差異。程序實現了全天任意時刻全球電離層模型的三維動態演示功能。為全球電離層分布變化研究提供了動態交互的三維電離層模型,為全球電離層模型的構建和電離層形態學研究提供了一種更為逼真、可交互的電離層三維演示平臺。
IGS;GIM;VTEC;VRML;電離層模型;虛擬現實
0 引言
隨著戰場空間的拓展,“陸、海、空、天、電”五維空間已成為戰場環境仿真中重要的環境仿真要素[1]。空間環境是航天器異常和故障的重要誘因。電離層是地球空間環境的重要組成部分,它對衛星通信、衛星導航系統有著重要的影響。
電離層復雜多變,它與太陽輻射、地球磁場的變化緊密相關,對其變化規律的研究尤為重要。在構建包含電離層信息的虛擬空間環境時,大量的電離層數據會導致虛擬仿真系統運行速度降低。如何提高虛擬仿真系統的運行速度以及快速構建逼真的全球電離層虛擬模型是當前需要解決的關鍵問題。國際GPS服務IGS(international GNSS service)提供了全球電離層格網地圖,這些數據可在IGS的綜合分析中心下載。IGS根據全球7個IGS分析中心給出的電離層VTEC(vertical total electron content)計算結果取加權平均值,求得最終的GIMs(global ionosphere maps )地圖,最后將地圖數據傳送給全球資料中心和中央局的信息中心,免費的、公開的供用戶使用[2]。本研究采用IGS提供的GIMs地圖數據進行時間和空間插值計算并結合VRML(virtual reality modeling language)技術構建了全球電離層三維模型。
1 IGS電離層產品介紹
IGS提供的電離層產品格式為IONEX 1.0格式。其下載地址為:ftp:∥cddis.gsfc.nasa.gov /gps/products/ionex/yyyy/ddd。其中yyyy為觀測數據的年份,ddd為為觀測數據的日期,以每年1月1日為起始的天累計數。在IGS的FTP下載文件為壓縮包,文件名為 igsgDDD0YYi.z。 解壓縮后文件名為igsgDDD0.YYi,其中DDD為觀測數據的日期,以每年1月1日為起始的天累計數;YY為觀測年份的后2位數。如igsg2060.15i表示2015年從1月1日起算的第206天電離層全球地圖數據[3]。
全球電離層地圖全天從0點開始,每隔2小時提供一幅地圖,共有13幅地圖。如下所示:
1.0 IONOSPHERE MAP MIX IONEX VERSION/
這段數據為文件頭,1.0說明文件為1.0 IONOSPHERE MAPS MIX 格式,
2012 6 19 0 0 0 EPOCH OF FIRST
MAP
2012 6 20 0 0 0 EPOCH OF FIRST
MAP
7200 INTERVAL
13 # OF MAPS IN
FILE
COSZ MAPPING
這段數據表示觀測開始和結束時刻。數據間隔為7 200 s,全文件含有13幅圖,TEC投影為VTEC值的投影函數為COSZ。
圖1這段數據表示:全球有426個觀測站、32顆衛星的數據被使用;地球半徑為6 371.0 km;地圖為二維地圖;電離層高度為海拔450 km;緯度范圍為87.5°~-87.5°,經度范圍-180°~180°,格網間距緯度為5°,經度為-2.5°。
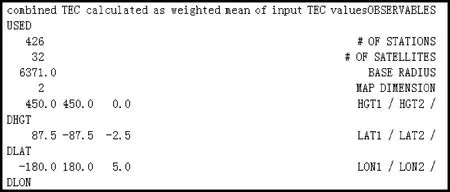
圖1 IGS數據文件片段1Fig.1 IGS data file part 1
圖2這段數據為電離層VTEC地圖數據從2012-06-19T7:00:00開始的第1幅地圖。該段數據緯度為87.5°,經度-180°~180°,海拔高度450 km處的格網電離層VTEC值[4-5]。
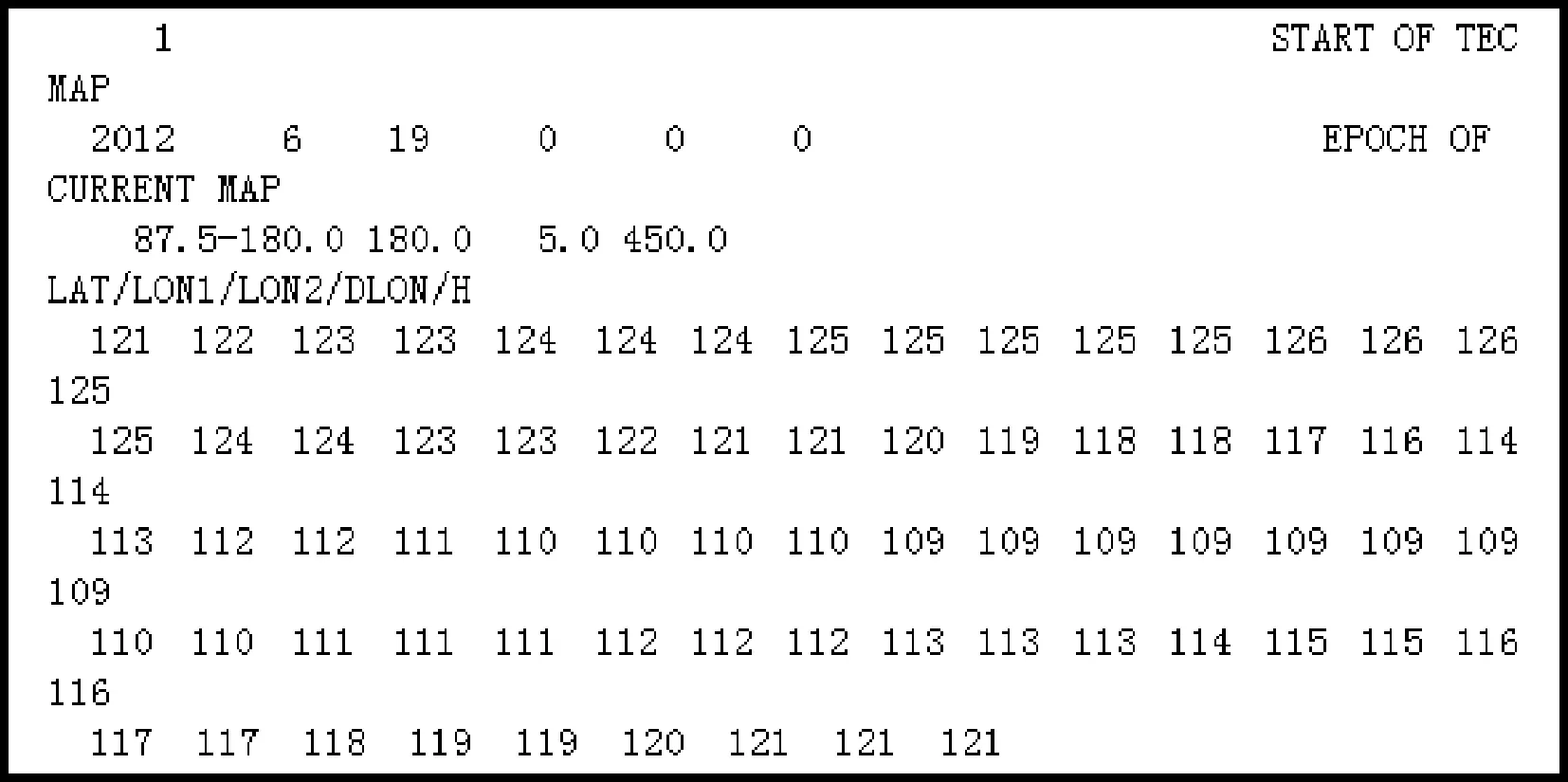
圖2 IGS數據文件片段2Fig.2 IGS data file part 2
2 電離層VTEC地圖插值方法研究
為了獲得任意時間的全球電離層VTEC地圖,需要對IGS提供的每隔2 h一幅的電離層VTEC地圖進行時間域的插值,以期獲得全天任意時刻t對應的GIM地圖。
本文采用了BERN程序源代碼中的插值方法,它提供了4種內插算法,其算法公式分別為[2,6-7]
E(β,λ,t)=Ei(β,λ),
(1)
(2)
(3)
(4)

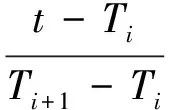
根據上面的4個公式,可以得到一天中任意時刻的全球電離層地圖。圖3為IGS電離層地圖數據經過最近鄰插值得到的當日0時的GIM圖。本文采用了式(3)進行了GIM圖插值計算,然后再采用最鄰近插值進行格網插值,計算結果見圖3。圖3為當日1時的GIM圖。圖3~6中,tec軸為格網電離層VTEC值,單位TECU;lat軸為格網緯度,單位(°);lon軸為格網經度,單位(°)。
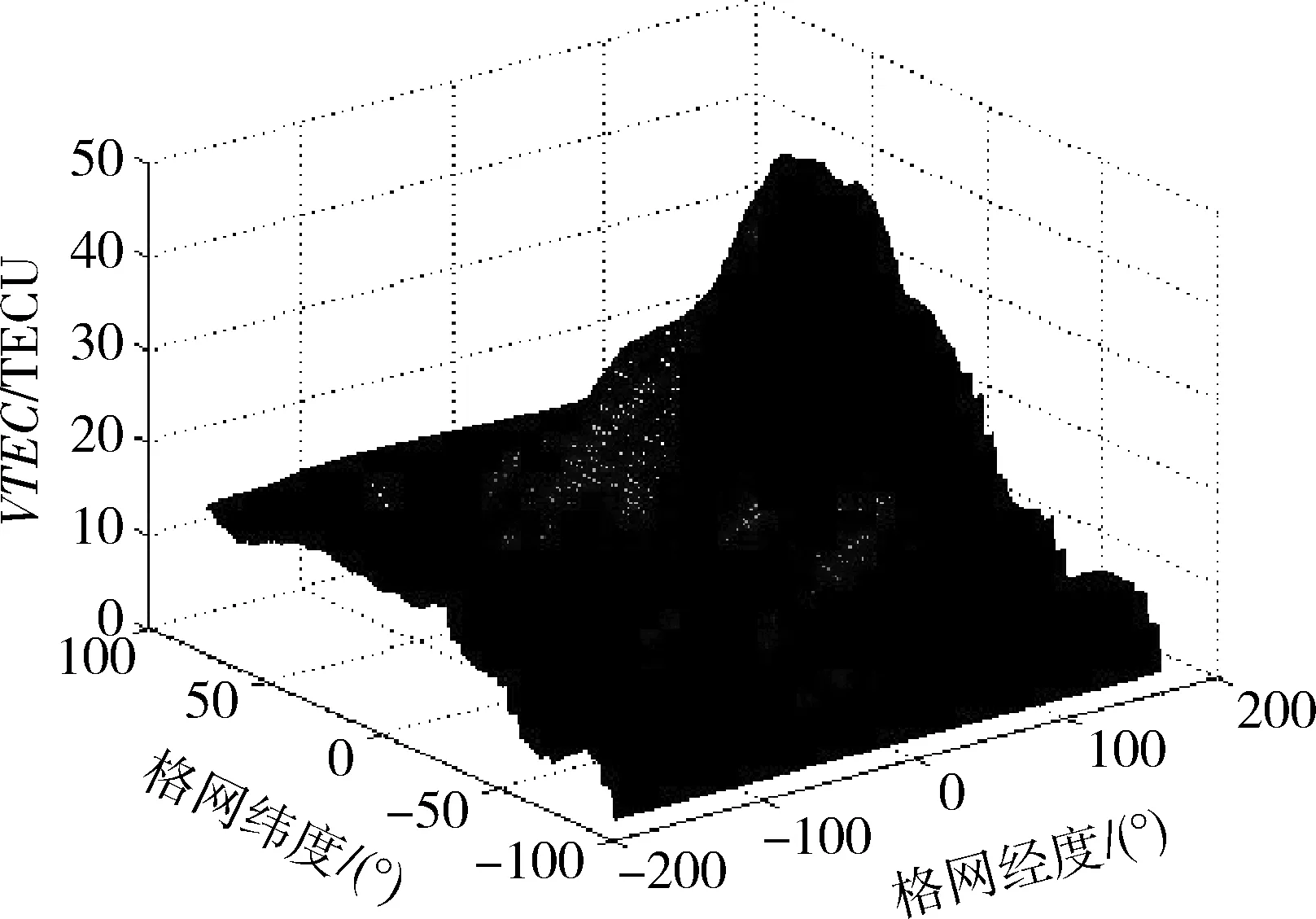
圖3 當日1時的GIM圖Fig.3 GIM Map at 1:00 am
本文還考察了采用式(3)與式(2)2種插值算法的差值,即由式(3)計算當日1時GIM圖和式(2)計算當日1時GIM圖差值見圖4。從圖4中可以看出考慮了地球自轉和時間延遲的地圖插值結果與僅考慮時間延遲的插值結果最大偏差在±7TECU。由于GIM地圖格網較大,要得到全球任意位置的VTEC數據,還需對插值得到的GIM地圖進行格網插值。本文采用了基于最鄰近插值、線性插值、樣條插值3種方法對格網地圖進行插值,見圖5鄰近插值減去雙線性插值結果。本文采用Matlab軟件生成了格網為1°×1°的插值結果圖。
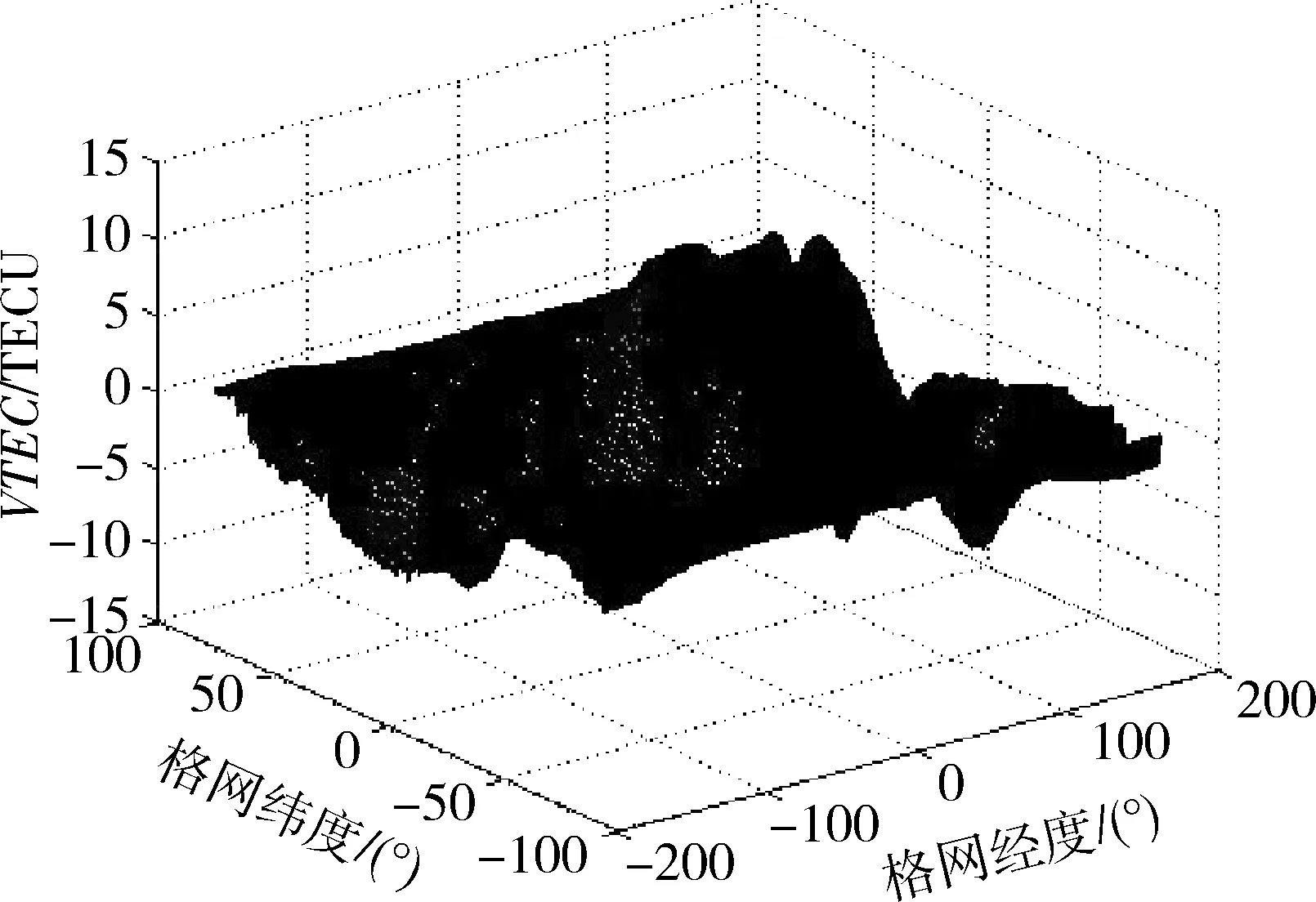
圖4 2種插值算法差值Fig.4 Deviation of two methods
設插值格網為數組[x,y],VTEC插值為數組Z1,腳本文件插值函數語句為
[x,y]=meshgrid(lons,lats);%lons為數組(-180:5:180) ,lats為數組(87.5:-2.5:-87.5);z為GIM地圖中讀取的VTEC數組
TecMap=[x,y,z];%加密格網
[X,Y]=meshgrid(-180:1:180,87.5:-1:-87.5);
%格網插值:最鄰近插值(可選用樣條插值、線性插值、三次樣條插值)
Z1=interp2(x,y,z,X,Y,‘nearest’);%最鄰近插值
Z1=interp2(x,y,z,X,Y,‘spline’);%樣條插值
Z1=interp2(x,y,z,X,Y);%線性插值
Z1=interp2(x,y,z,X,Y,‘cubic’);%三次樣條插值
不同插值算法輸出的結果差異分布不均勻。總體看來,對比表明鄰近插值減去雙線性插值結果最大偏差小于±8.5TECU,見圖5;三次樣條減去雙線性插值結果最大偏差小于±8TECU,見圖6;各種插值算法偏差較大的區域分布在TEC變化劇烈的區域。
圖5 鄰近插值與雙線性插值偏差Fig.5 Deviation between neighbor interpolation and bilinear interpolation
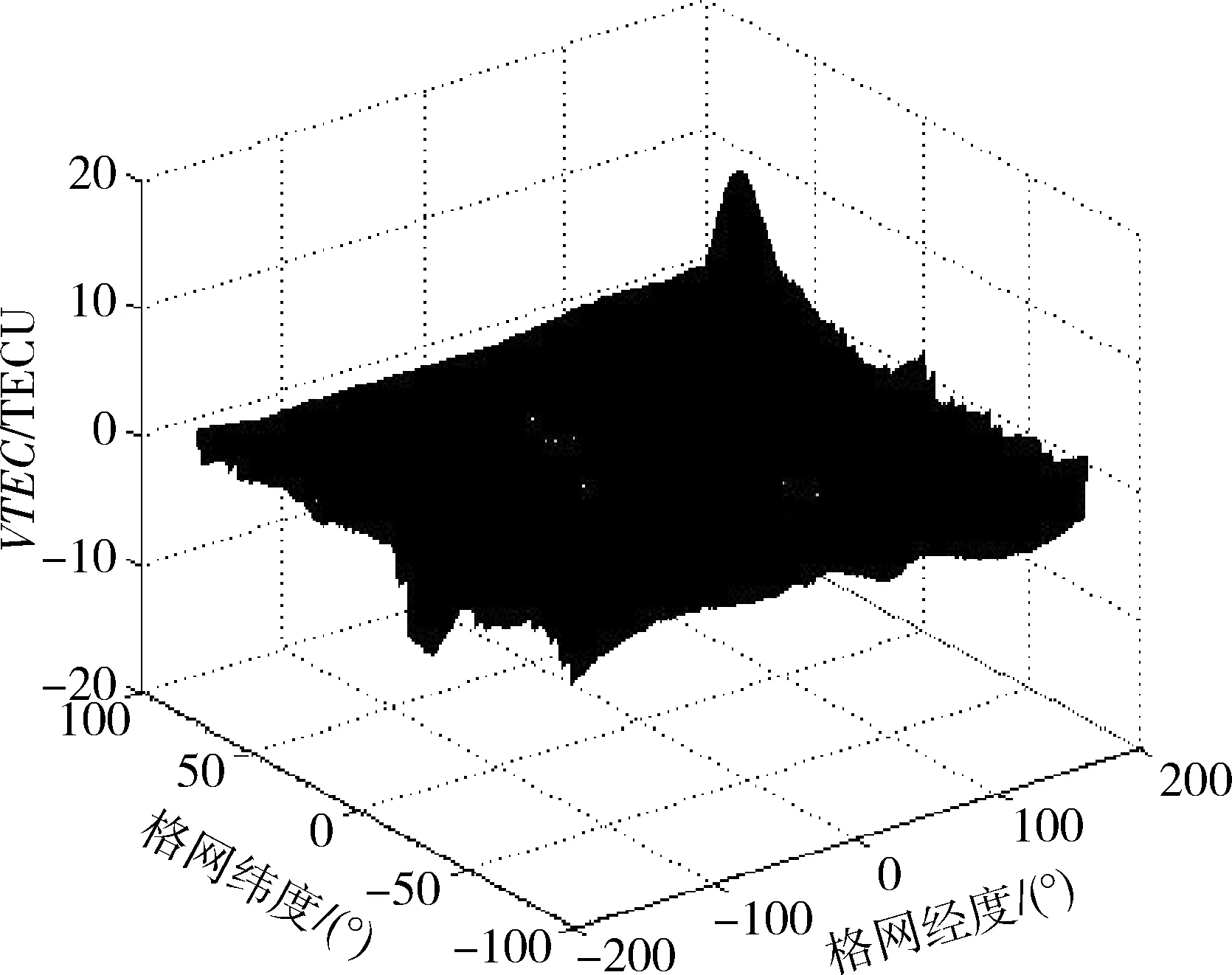
圖6 三次樣條插值與雙線性插值偏差Fig.6 Deviation between cubic spline interpolation and bilinear interpolation
3 全球電離層三維VR模型的構建
為了更好展現全球電離層變化情況,并且減少虛擬仿真系統處理的數據量,將電離層數據轉換為圖形并作為紋理加入到虛擬仿真系統是一種有效的方法[8-9]。本文首先將插值好的全球電離層地圖生成等VTEC值線圖。對應的Matlab腳本為
contour(X,Y,Z1);
然后,再采用VRML語言構建了地球3D建模。其主要方法是生成一個球體模型,然后添加地球紋理。
其思路是先制作一個球體,然后選擇一幅地球大陸圖片earth.JPG,作為紋理貼在球體上[10-12]。VRML代碼如下:
#VRML V2.0 utf8
DEF Sphere01 Transform {
translation 0 0 0
children [
Shape {
appearance Appearance {
material Material {
diffuseColor 0.5882 0.5882 0.5882
ambientIntensity 1.0
specularColor 0 0 0
shininess 3
}
texture ImageTexture {
url "earth.JPG"
}
}
在此基礎上,再制作一個大小與上一個地球一樣大小的透明球并使其與地球模型重合然后將插值模型得到的電離層等直線圖作為紋理添加在透明球模型上。在添加等直線圖時注意要使得2幅圖位置相對應,本文采用的地圖文件左邊界為經度0°,所制作的VTEC等直線圖左邊界也為經度0°。否則貼圖沒有對應到一起會使得VTEC圖與真實對應的地球位置錯位偏移。
為了達到更好的仿真效果,使得瀏覽者能夠既看到地球大陸輪廓又能看到VTEC等直線圖,將已制作的等高線地圖透明度設置為0.5,以便它貼在三維地球模型上時能夠透出地球自然地貌,Shape節點只是增加transparency節點,設置為0.5;紋理的url設置為已制作的等直線圖contour.JPG[13-15]。對應代碼為
DEF Sphere02 Transform {
translation 0 0 0
children [
Shape {
appearance Appearance {
material Material {
diffuseColor 0.5882 0.5882 0.5882
ambientIntensity 1.0
specularColor 0 0 0
shininess 3
transparency 0.5
}
texture ImageTexture {
url "contour.JPG"
}
}
運行效果見圖7。
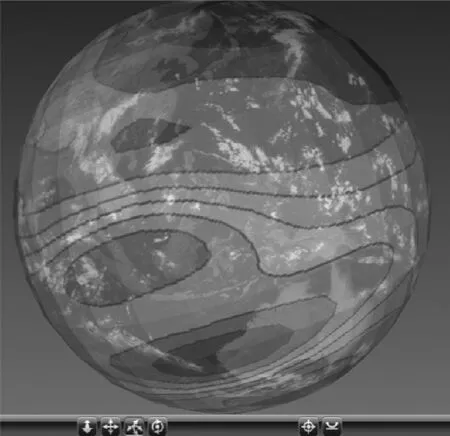
圖7 全球電離層VR模型Fig.7 Global ionosphere VR model
4 結束語
本文首先研究了IGS電離層VTEC地圖插值方法,在時間域和空間域對GIM地圖進行插值。通過研究表明文章中的方法適合于構建全球電離層插值地圖。通過對比不同插值算法,發現不同插值方法差異較大的地區主要分布在電離層VTEC值較大的區域,通常最大差異值達到±8TECU左右。本文將插值結果生成等直線圖,將其應用在三維VR地球模型中,得到了具有交互、動態演示功能的全球電離層模型。使用該方法可以制作全球任意時刻全球電離層VR模型,為全球電離層形態學、電離層與地球磁場研究以及電離層與太陽活動研究提供了交互式的三維仿真演示平臺。
[1] 王潔.面向服務的復雜電磁環境態勢可視化[D].南京:南京理工大學,2015.
WANG Jie.Service Oriented Visualization of Complex Electromagnetic Environment Situation[D].Nanjing:Nanjing University of Science and Technology,2015.
[2] CDDE AC TEAM.Global Ionosphere Maps Product by CODE[DB].International GNSS Service.USA.2012.ftp:∥ftp.unibe claiub/ionev/soura.
[3] SCHAER S,GURTER W,FELTENS J IONEX.The Ionosphere Map Exchange Format Version[S].Proceedings of the IGS AC Workshop,1998:233-247.
[4] Ionex Data Format[DB].International GNSS Service.USA.2016.ftp:∥igs.org/ igscb/ data /format /ionex1.ps
[5] Ionex Data[DB].International GNSS Service.USA.2016.ftp:∥cddis.gsfc.nasa.gov / gps/ products/ ionex/
[6] 王五魁,劉長建,吳洪舉.IGS電離層VTEC產品內插算法解析[J].全球定位系統,2013,38(6):18-19.
WANG Wu-kui,LIU Chang-jian,WU Hong-ju.Interpolating Algorithm Analysis of IGS Ionosphere VTEC Product[J].GNSS World of China,2013,38(6):18-19.
[7] 楊曉云,何恒,劉凱,等.IGS電離層VTEC地圖內插模型研究[C]∥西安:國家安全地球物理叢書(十一),2015:15-16.
YANG Xiao-yun,HE Heng,LIU Kai,et al.Interpolating Algorithm Analysis of IGS Ionosphere VTEC Product[C]∥The 11thGeophysics and National Security(The Application of Geophysical Front),Xi’an,2015:15-16.
[8] 關卓威.基于臨近空間平臺的立體信息獲取及可視化技術研究[D].哈爾濱:哈爾濱工業大學,2014.
GUAN Zhuo-wei.Stereo Information Acquisition and Visualization Technology Studies Based on Near Space Platform[D].Harbin:Harbin Engineering University,2014.
[9] 何英英.基于WEB的三維場景建模和漫游技術研究[D].哈爾濱:哈爾濱工業大學,2013.
HE Ying-ying.Research on Model and Roam Technology of 3D Scene Based on WEB[D].Harbin:Harbin Engineering University,2013.
[10] 莫雨帆.虛擬現實漫游系統的研究和實現方法[D].武漢:武漢科技大學,2012.
MO Yu-fan.Research and Implementation of Virtual Reality Roaming System[D].Wuhan:Wuhan University of Technology,2012.
[11] 李翔宇.基于VRML的交互式虛擬漫游場景的應用研究[D].天津:天津大學,2013.
LI Xiang-yu.VRML-Based Interactive Virtual Roaming Scenario Application and Research[D].Tianjin:Tianjin University,2013.
[12] 曾子力.基于VRML的虛擬現實中三維建模技術的研究[J].電腦編程技巧與維護,2016(6):78-79.
ZENG Zi-li.Research on VRML 3D Technology[J].Computer Programming Skills & Maintenance,2016(6):78-79.
[13] 夏明錦.基于Web 3D的VRML的三維造型及動畫技術探討[J].信息與電腦,2016(5):130-131.
XIA Ming-jin.VRML 3D Model and Animation Technology Research Based on Web 3D[J].China Computer & Communication,2016(5):130-131.
[14] 楊歡,劉小玲.虛擬現實系統綜述[J].軟件導刊,2016(4):36-37.
YANG Huan,LIU Xiao-ling.Summary of Virtual Reality System[J].Software Guide,2016(4):36-37.
[15] 王輝,宋昌統.基于X3D的虛擬現實技術建模[J].電腦知識與技術,2016(5):238-239.
WANG Hui,SONG Chang-tong.Virtual Reality Technology Modeling Based on X3D[J].Computer Knowledge and Technology,2016(5):238-239.
IonosphereVRModelConstructionBasedonIGSData
YANG Xiao-yun, LIU Dai-zhi, HE Heng, HOU Wei-jun,LI Yi-hong
(Rocket Force University of Engineering,Shaanxi Xi′an 710025,China)
The construction of global ionosphere model is an important element of the near-earth space environment. IGS presents GIMs, but it has a low-resolution in time and space. The interpolating algorithms of BERN program and interpolation algorithms are used and the difference between nearest, spline and cubic interpolation algorithms are presented. The program outputs a 3D ionosphere VR model. The platform has a function to show a dynamic and mutual 3D ionosphere model at anytime and anywhere. Moreover, the 3D ionosphere demo platform is realistic and exact for the construction and morphologic research of the ionosphere.
international GNSS service (IGS); global ionosphere maps (GIM); vertical total electron content (VTEC); virtual reality modeling language (VRML); ionosphere model; virtual reality
2016-09-08;
2017-02-20
楊曉云(1980-),女,陜西三原人。講師,博士生,主要研究方向為電離層閃爍。
通信地址:710025 陜西省西安市灞橋區洪慶街道同心路2號2906分隊E-mail:yangxiaoyun303@126.com
10.3969/j.issn.1009-086x.2017.05.002
TP391.4
A
1009-086X(2017)-05-0007-05
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
科技傳播(2019年22期)2020-01-14 03:06:54
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
光學精密工程(2016年6期)2016-11-07 09:07:19