軌道轉移航天器紫外自主導航的應用*
2017-11-20 10:46:04潘靜姚宏瑛
現代防御技術 2017年5期
潘靜,姚宏瑛
(中國航天科工集團第二研究院 七〇六所,北京 100854)
軌道轉移航天器紫外自主導航的應用*
潘靜,姚宏瑛
(中國航天科工集團第二研究院 七〇六所,北京 100854)
應用紫外敏感器可較高精度地實現航天器全程自主導航。為解決其應用于中高軌不全程可見以及地心距測量誤差大的問題,將紫外敏感器采用中心視場和環形視場同軸的結構,用中心視場觀測地球,僅以地心方向矢量作為觀測量降維輸出,采用擴展卡爾曼濾波算法估計出航天器的位置和速度。對該方案建立算法模型,以軌道高度1 000~36 000 km的轉移軌道為例仿真驗證,研究測量精度、采樣周期對導航精度的影響,分析系統可觀性。仿真結果表明,系統可觀,紫外敏感器測量精度越高導航精度越高,地心方向測量誤差不大于0.05°時導航精度位置誤差不超過4 km、速度誤差不超過0.5 m/s,方案有效可行。
自主導航;紫外敏感器;軌道轉移;地心矢量;降維;擴展卡爾曼濾波
0 引言
空間已成為維護國家安全和國家利益必須關注和占領的戰略制高點。隨著航天任務的發展,航天器需要實時、高精度地確定自身的位置和姿態信息,這對自主導航提出了迫切的要求。航天器自主導航是指航天器在不依賴地面支持的情況下,通過其自身所攜帶的測量設備確定航天器的位置和速度[1]。自主導航有利于降低航天器對地面的依賴程度,提高系統的生存能力,輕小型、高精度、長航時、全自主是其發展方向。
自20世紀60年代以來,國外就開始研究航天器基于星體敏感器的自主導航方案。與此同時,不斷發展與各種自主導航系統方案相適應的各種敏感器,包括地球敏感器、太陽敏感器、CCD星敏感器、自動空間六分儀等[2]。紫外敏感器更是近些年來的研究熱點,其體積小、質量輕、成本低、精度高等特點,使其具有無可比擬的優勢。基于紫外敏感器的天文導航技術極具研究價值與發展潛力,是提高航天器自主導航系統性能的極佳選擇。
Holleywell公司從1992年開始研制地球基準姿態確定系統(ERADS),用一個紫外敏感器同時提供衛星的三軸姿態數據和自主導航數據,是小衛星關鍵技術的一項重要突破[3]。NASA的Goddard空間飛行中心在1996年研制了基于瑞麗散射的紫外地球敏感器,并進行了搭載實驗[4]。中國空間技術研究院在2009年設計研制了應用于地月轉移軌道慢旋探測器的紫外地球月球敏感器[5]。
由于紫外敏感器視場角的范圍限制,基于紫外敏感器的自主導航多用于低軌衛星。本文針對中軌到高軌的軌道轉移航天器應用(軌道高度范圍為1 000~36 000 km),僅以地心方向作為觀測量設計了一種基于紫外敏感器的自主導航方案,并通過仿真驗證其有效性。
1 導航原理
1.1紫外敏感器
紫外敏感器是一種基于感受天體紫外線輻射獲得航天器位置和姿態信息的成像式敏感器,工作波段為 270~300 nm。空間的紫外線輻射來自地球邊緣的大氣層和太陽、恒星等天體。由于大氣中的氧和臭氧形成波長小于 300 nm 的強吸收帶,在地面和大氣特征以上的高度形成球日照邊緣,且此日照邊緣不受地面和氣象特征的影響,因此在紫外波段能探測出整個地球邊緣的圖像,其圖像穩定性可與紅外圖像媲美。同時紫外波段也是觀測導航星的極佳光譜波段[6]。
紫外敏感器體積小、質量輕、功耗小、精度高,利于系統小型化和微型化的需求,是新一代敏感器的發展方向[7-9]。如圖1所示,它具有2個視場:中心視場和外環視場,2個視場通過平面鏡反射成像在一塊CCD板上。其各項參數對比見于表1。
圖1 紫外敏感器視場示意圖Fig.1 Schematic diagram of the field of ultraviolet sensor

表1 紫外敏感器視場參數對比Table 1 Comparison of field parameters of ultraviolet sensor
中心視場30°,用于觀測太陽或恒星的紫外輻射,從而得到恒星在觀測坐標系下的坐標,與其在絕對坐標系下的坐標進行運算后,最終確定航天器的三軸姿態。可觀測+4.5等以上的星體,數量可達200顆左右,自動識別星圖,定姿精度10″(1δ)。
外環視場一般120°~160°,用于觀測地球大氣層的邊緣,圖像經處理后得到地心矢量信息(包括地心矢量方向和地心距),經過運算從而確定航天器在軌位置以及速度。基于紫外敏感器的自主導航其精度主要取決于地心方向測量精度,測距誤差對導航精度的影響并不十分顯著。其中地心測距誤差5~5 000 m,地心方向矢量測量誤差0.01°~0.2°(1δ)[10-11]。
1.2應用改進
紫外敏感器與航天器固連,其外環視場敏感地球大氣邊緣的紫外輻射,通過辨識成像整圓的大小和方位,經數據處理得到地心矢量信息(包括地心方向和地心距),進而確定航天器在軌位置以及速度。由于受到外環視場角的限制(一般120°~160°),若要求地球全程可見以實現全程基于紫外敏感器自主導航,航天器運行軌道高度需滿足一定條件。如圖2所示,軌道高度h,有
R/sinθ2-R≤h≤R/sinθ1-R.
(1)

圖2 軌道高度與視場角關系示意圖Fig.2 Orbit height and angle relation diagram
紫外敏感器外環視場角一般為120°~160°,即θ1=60°,θ2=80°。由式(1)知,在軌道高度為(98.3,985.6)km的范圍內航天器可基于紫外敏感器全程自主導航。故基于紫外敏感器的自主導航多應用于低軌衛星。而對于中高軌航天器,以軌道高度1 000~36 000 km的中高軌軌道轉移航天器為例,為實現其全程基于紫外敏感器自主導航,則要求外環視場范圍為17°~120°。如此大范圍的外環視場需求對于紫外敏感器的生產工藝提出了嚴峻的挑戰。
除此以外,隨著軌道高度的增加,地心距逐漸增大,航天器對地球的視場角逐漸減小,即CCD板上成像圓盤的直徑越來越小,使得地心距的測量誤差逐漸增大。從高度為1 000 km軌道轉移到高度為36 000 km軌道,地心距的測量誤差從1 000 m逐漸增加到幾十km。地心距測量數據可信度大大降低,并且這是個動態隨機變化的過程無法定量描述給予補償,故地心距測量數據不可用。
考慮到上述問題,針對中高軌軌道轉移航天器,可將紫外敏感器采用中心視場和環形視場同軸的結構,用中心視場觀測地球,用環形視場觀測導航恒星,即將地球視為質點,僅以地心方向矢量作為觀測量設計基于紫外敏感器的自主導航方案。此方案巧妙使用即有的紫外敏感器,無需額外定制大范圍外環視場;而基于紫外敏感器的自主導航其精度主要取決于地心方向測量精度,測距誤差對導航精度的影響并不十分顯著,故僅以地心方向矢量作為觀測量的降維處理在理論上可行。綜上,此改進方案同時解決了紫外敏感器應用于中高軌航天器不全程可見和地心距測量誤差大的問題。
2 算法模型
2.1坐標系的選取
選取J2000地心赤道慣性坐標系(Oxyz),其定義為:以地心為原點,J2000歷元時刻的地球平赤道面為參考面,x軸指向該歷元時刻的平春分點,z軸與參考面的正法向方向一致,選擇y軸使其與x,z軸垂直形成右手坐標系[12-13]。
本文中模型的建立、數據的運算均在此坐標系下定義。
2.2轉移軌道動力學方程
轉移軌道又稱過渡軌道,是航天器從初始軌道或停泊軌道過渡到工作軌道的中間軌道。如圖3所示,從高度為10 00 km的軌道轉移到高度為36 000 km的軌道,航天器在初始軌道某位置受到瞬時沖量的作用,速度突變,之后在無任何外加控制力的作用下自由漂移到目標軌道。軌道轉移的過程航天器僅受萬有引力作用,實際上是二體軌道動力學問題。在地心赤道慣性坐標系中取狀態變量X=(x,y,z,vx,vy,vz)T,建立軌道動力學方程,有[2]

(2)
式中:w為系統噪聲,并滿足E(w) = 0,E(wwT)=Q。

圖3 轉移軌道示意圖Fig.3 Schematic diagram of transfer orbit
2.3狀態方程的建立
對于近地軌道,地球攝動的主要因素是地球的扁狀,其他作用力與地球扁狀攝動相比都是10-3量級以下的小量[7]。因此,本文在建立系統的狀態方程時,考慮地球中心引力和J2攝動項,其他攝動因素等效為高斯白噪聲。式(2)在J2000地心赤道慣性坐標系下的三維形式有[2]
(3)

(4)
得到離散的系統狀態方程:
Xk=φ(k,k-1)Xk-1+ωk.
(5)
紫外敏感器的輸出為地心矢量的大小和方向,僅以地心方向作為觀測量,觀測方程有

(6)
(7)
式中:νK為量測噪聲,并滿足E(ν)=0,E(ννT)=R。
2.4濾波算法
采用擴展卡爾曼濾波算法[12-14]:
(8)

3 仿真分析
3.1方案論證
本文針對從軌道高度1 000 km轉移到軌道高度36 000 km的中高軌軌道轉移航天器進行仿真,仿真遵循如下條件:
(1) 仿真模型:轉移軌道動力學方程;
(2) 參考坐標系:J2000地心赤道慣性坐標系;
(3) 敏感器精度:紫外三軸敏感器的測量精度分別取為0.01°(1δ);
(4) 采樣周期:0.1 s;
(5) 測量誤差:以白噪聲模擬測量誤差;
(6) 航天器姿態:假定航天器標稱姿態為航天器對地定向且三軸穩定;
(7) 轉移軌道參數:半長軸a=26 332 437.9,偏心率e=0.72,軌道傾角i=90°,升交點赤經Ω=0,近地角ω=13.75°,平近點角M=1.89°;
(8) 初始參數:
初始姿態( 0,0,0);
初始位置( 6.509 244 371 304 875e+006, 0, 3.713 244 835 519 765e+006)m;
初始速度(-3.737 397 235 776 740e+003,0,8.790 602 460 568 101e+003)m/s;
初始位置誤差(10,10,10)km;初始速度誤差(2,2,2)m/s。
根據以上仿真條件,采用模擬的軌道數據和紫外敏感器測量數據,在航天器運行4 h內進行采樣,仿真結果見圖4。大范圍初始誤差濾波依舊收斂,表明此自主導航方案對初始誤差不敏感。最終導航精度位置誤差1.23 km,速度誤差0.17 m/s,驗證方案有效。
3.2導航精度分析
(1) 紫外敏感器測量精度對導航精度的影響
根據現有工業水平紫外敏感器地心方向測量精度可達0.01°~0.2°(1δ)。分別取地心方向測量精度0.01°,0.02°,0.05°,0.1°,0.2°,研究紫外敏感器測量精度對導航精度的影響。取初始位置誤差500 m,初始速度誤差0.05 m/s,采樣周期0.1 s,仿真結果見表2。可知,紫外敏感器測量精度越高導航精度越高,且地心方向測量誤差不大于0.05°時導航精度位置誤差不超過4 km、速度誤差不超過0.5 m/s。故該自主導航方案具有工業基礎和工程基礎,與現有工程產品有覆蓋,具有可實現性。
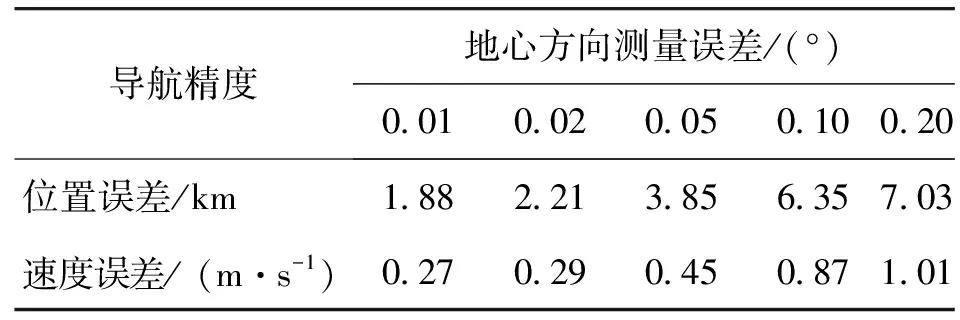
表2 紫外敏感器測量精度對導航精度的影響Table 2 Influence of measurement accuracy of ultraviolet sensor on navigation accuracy
(2) 采樣周期對導航精度的影響
分別取采樣周期0.1,1,10,100 s,研究采樣周期對導航精度的影響。取初始位置誤差500 m,初始速度誤差0.05 m/s,紫外敏感器精度0.01°(1δ),仿真結果見表3。可知,采樣周期越短導航精度越高。實際工程中采樣周期的選取要綜合考慮導航精度、系統可觀測性、成像曝光時間以及數據處理速度的要求[15]。
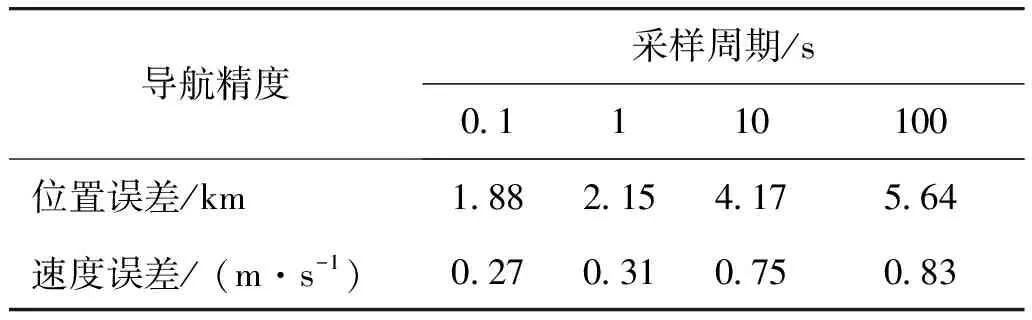
表3 采樣周期對導航精度的影響Table 3 Influence of sampling period on navigation accuracy
3.3可觀測性分析
如果系統的狀態能被過去的觀測值唯一確定,則該系統為可觀測的[2]。基于紫外敏感器的自主導航其狀態方程和觀測方程均為非線性的,因此本文將非線性系統線性化、將時變系統等效為分段線性定常系統,結合擴展卡爾曼濾波的特點,對系統可觀測性進行分析。
可觀測性矩陣定義為[16-17]
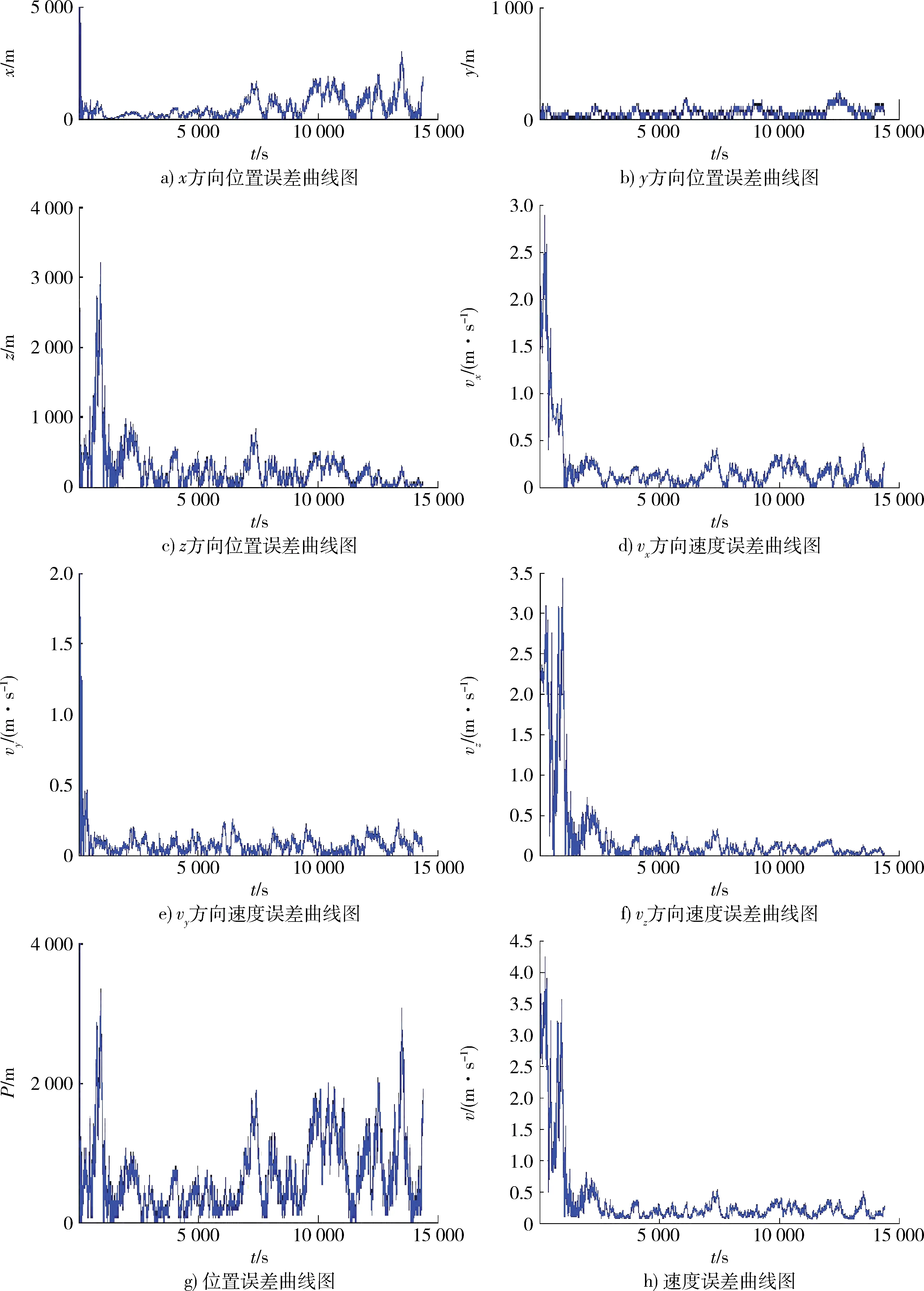
圖4 仿真結果圖Fig.4 Simulation results chart
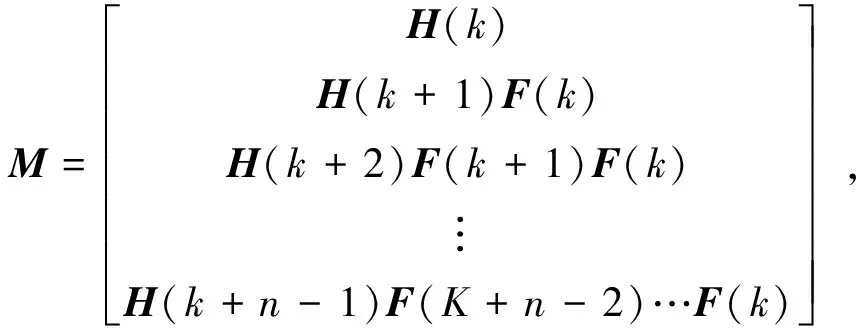
(9)
若rand(M)=6,則系統可觀測。同時取系統可觀測性矩陣M的條件數cond(M)作為系統可觀測度的度量標準。如果可觀測性矩陣的條件數較大,說明該可觀性矩陣為一個病態矩陣,可觀度就較差,在相同量測誤差下得到的估計誤差就較大;反之,可觀性矩陣的條件數較小,則可觀度較好。
系統的可觀測性一般受到在軌參數、采樣周期以及觀測量選取的影響。分別取采樣周期0.1,1,10,100 s,研究采樣周期對系統可觀測性的影響。取初始位置誤差10 km,初始速度誤差2 m/s,紫外敏感器精度0.01°(1δ),在點( 6.509 244 371 304 875e+006,0,3.713 244 835 519 765e+006)處進行分析,仿真結果見表4。顯然系統可觀,隨著采樣周期的增長,可觀性矩陣的條件數隨之增大,系統可觀度降低。對應圖5~8,可知可觀度越好收斂速度越快。實際工程中采樣周期的選取要綜合考慮導航精度、系統可觀測性、成像曝光時間以及數據處理速度的要求。
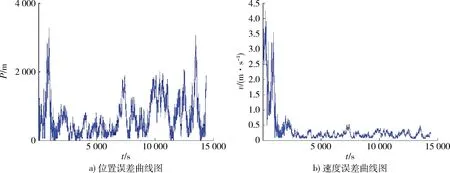
圖5 不同采樣周期收斂速度(T=0.1 s)Fig.5 Convergence rate of different sampling periods(T=0.1 s)
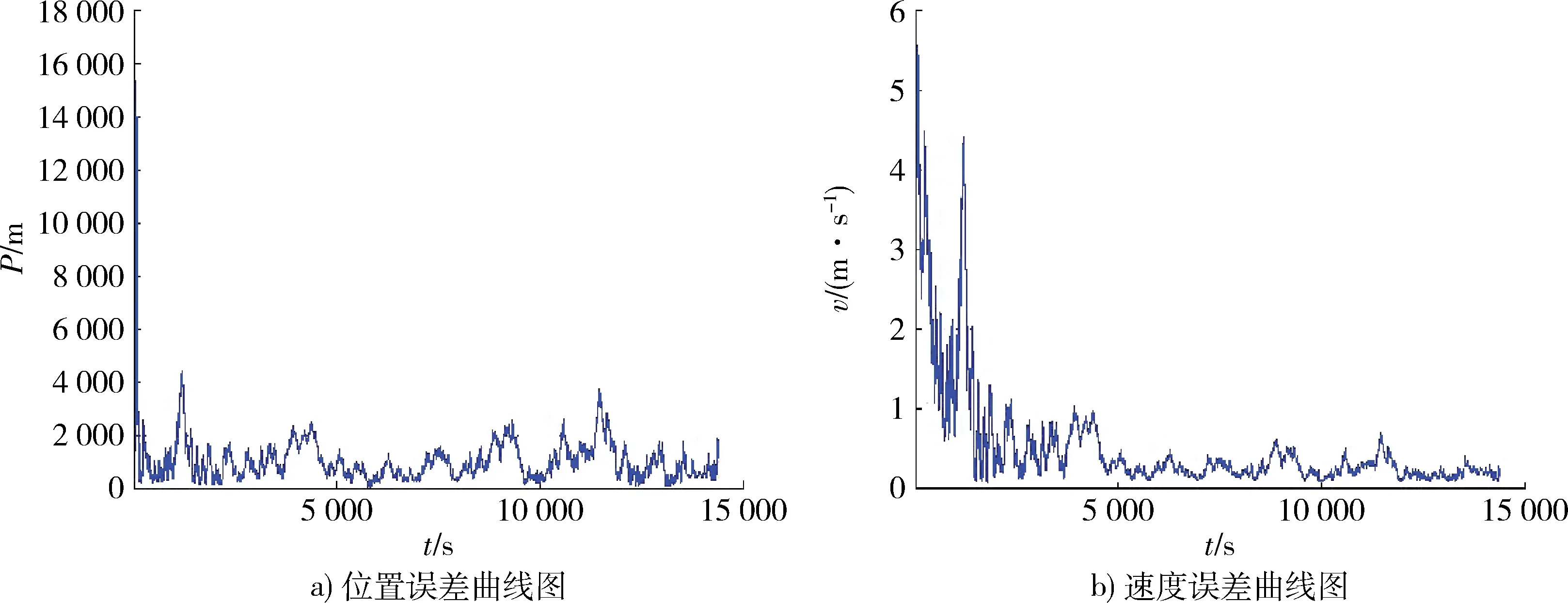
圖6 不同采樣周期收斂速度(T=1 s)Fig.6 Convergence rate of different sampling periods(T=1 s)
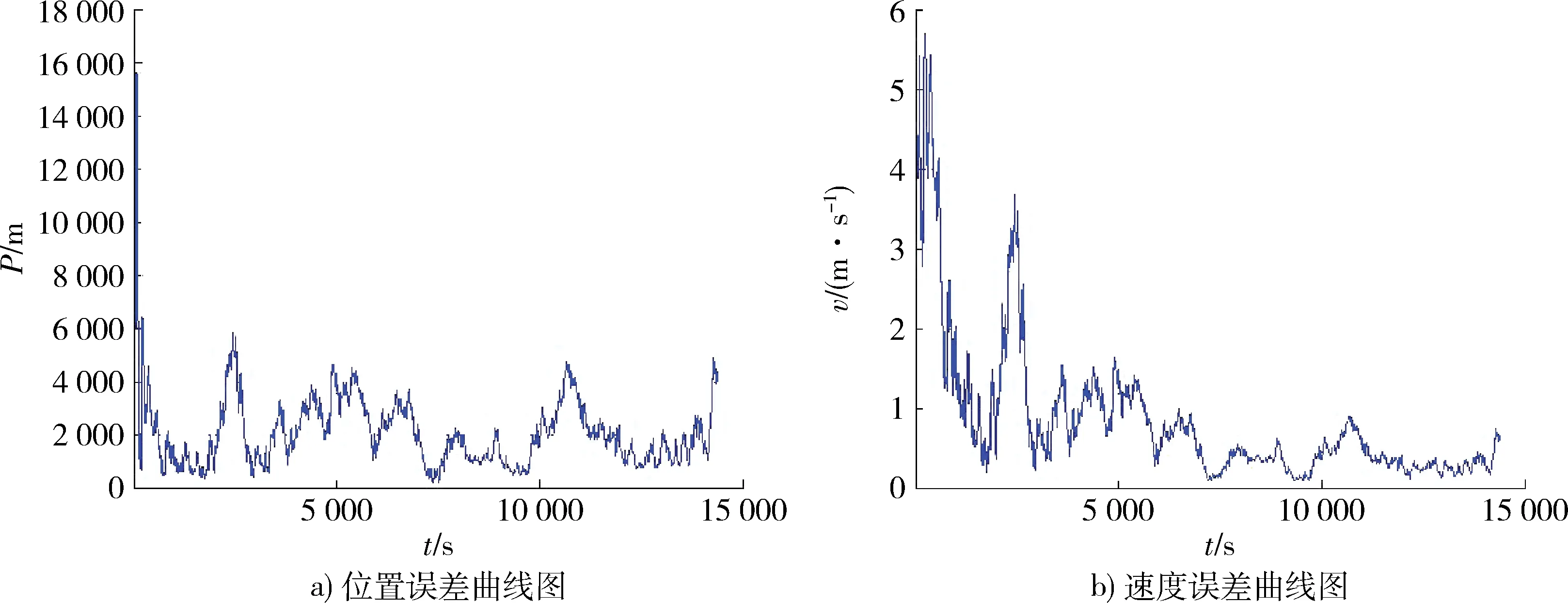
圖7 不同采樣周期收斂速度(T=10 s)Fig.7 Convergence rate of different sampling periods(T=10 s)
圖8 不同采樣周期收斂速度(T=100 s)Fig.8 Convergence rate of different sampling periods(T=100 s)
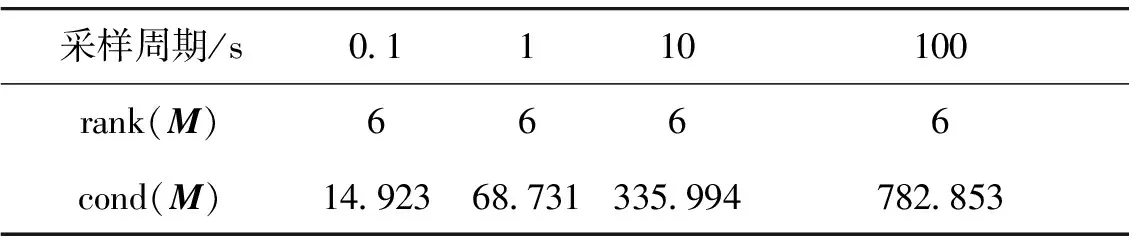
表4 采樣周期對系統可觀測性的影響Table 4 Influence of sampling period on the observability of the system
4 結束語
本文針對中高軌軌道轉移航天器設計了一種基于紫外敏感器的自主導航方案。紫外敏感器采用中心視場和環形視場同軸的結構,用中心視場觀測地球,將地球視為質點僅以地心方向矢量作為觀測量,EKF濾波算法估計出航天器的位置和速度。此方案同時解決了紫外敏感器應用于中高軌航天器不全程可見和地心距測量誤差大的問題。并以從軌道高度1 000 km轉移到軌道高度36 000 km為例進行仿真,仿真結果表明:
(1) 紫外敏感器測量精度0.01°(1δ),飛行4h最終位置誤差1.23 km,速度誤差0.17 m/s,方案有效;
(2) 該方案對初始誤差不敏感;
(3) 紫外敏感器測量精度越高導航精度越高,且地心方向測量誤差不大于0.05°時導航精度位置誤差不超過4 km、速度誤差不超過0.5 m/s,該方案有效可行,具有工程價值和實際意義;
(4) 采樣周期越短導航精度越高,系統可觀性越好,濾波收斂速度越快。實際工程中采樣周期的選取要綜合考慮導航精度、系統可觀測性、成像曝光時間以及數據處理速度的要求。
[1] 管樂鑫,魏春嶺.基于紫外敏感器和星敏感器的衛星自主導航[J].空間技術與應用,2008,34(3):37-41.
GUAN Yue-xin ,WEI Chun-ling.Satellite Autonomous Navigation Based on UV Sensor and Star Sensor[J].Space Technology and Application,2008,34(3):37-41.
[2] 房建成,寧曉琳,田玉龍.航天器自主天文導航原理與方法[M].北京:國防工業出版社,2006:2-3.
FANG Jian-cheng,NING Xiao-lin,TIAN Yu-long.Principle and Method of Autonomous Celestial Navigation for Spacecraft[M].Beijing:National Defence Industry Press,2006:2-3.
[3] 耿建中,肖業倫,韓潮.基于紫外敏感器的衛星自主導航方法研究[J].航天控制,2007,25(2):47-51.
GENG Jian-zhong,XIAO Ye-lun,HAN Chao.Satellite Autonomous Navigation Based on UV Sensor[J].Aerospace Control ,2007,25(2):47-51.
[4] PLEDGER D,BILLING-ROSS J,SAYLOR W.Development of Honeywells Earth Refrence Attitude Determination System(ERADS)[R].Proc.of the 7th Annual AIAA/USU Conf.On Small Stallites,1993.
[5] 喬國棟,李鐵壽,王大秩.基于紫外敏感器的地月轉移軌道慢旋探測器的自主導航算法[J].宇航學報,2009,30(2):1-15.
QIAO Guo-dong,LI Tie-shou,WANG Da-zhi.Autonomous Navigation Algorithm Based on UV Sensor for the Slow Rotation of the Earth Moon Transfer Orbit[J].Acta Astronautica,2009,30(2):1-15.
[6] 宋琛,張蓬蓬,張劍波.基于紫外敏感器的衛星導航[J].計算機仿真,2010,27(11):14-15.
SONG Chen,ZHANG Peng-peng,ZHANG Jian-bo.Satellite Navigation Based on UV Sensor[J].Computer Simulation,2010,27(11):14-15.
[7] 魏春鈴,李勇,陳義慶.基于紫外敏感器的航天器自主導航[J].航天控制,2004,22(3):35-39.
WEI Chun-ling,LI Yong,CHEN Yi-qing.Spacecraft Autonomous Navigation Based on UV Sensor[J].Aerospace Control,2004,22(3):35-39.
[8] 馬元申,陳文清,張文靜.空間戰總體概念體系結構分析[J].航天電子對抗,2003(5):5-8.
MA Yuan-shen,CHEN Wen-qing,ZHANG Wen-jing.Analysis of the System Structure of the Overall Concept of Space War[J].Space Electronic Countermeasure,2003(5):5-8.
[9] 何炬.國外天文導航技術發展綜述[J].艦船科學技術,2005,27(5):91-96.
HE Ju.Survey on the Development of Astronomy Navigation Technology Abroad[J].Ship Science and Technology,2005,27(5):91-96.
[10] 施常勇,賀亮,夏永江.基于多目標紫外敏感器的自主導航技術[C]∥上海市紅外與遙感學會2008年學術年會會議論文,2008.
SHI Chang-yong,HE Liang,XIA Yong-jiang.Autonomous Navigation Technology Based on Multi Objective UV Sensor[C]∥Proceedings of the 2008 Annual Conference of the Society of Infrared and Remote Sensing,Shanghai,2008.
[11] 郝云彩,王立.紫外月球敏感器的幾個關鍵問題[J].航天控制,2005,23(1):87-91.
HAO Yun-cai,WANG Li.Some Key Problems of the Ultraviolet Lunar Sensor[J].Aerospace Control,2005,23(1):87- 91.
[12] Al Lemay J L.High Altitude Navigation Study[R].El Segundo,1973.
[13] BRUNKE S S.Nonlinear Filtering and Systems Identification Algorithms for Autonomous System[D].PhD Thesis:University of Washington,2001.
[14] FESQ L.Spacecraft Autonomy in the New Millennium.Proc.of the Annual AAS Rocky Mountain[C]∥Guidance and Control Conference,Breckenridge,Colorado,1996,AAS 96- 001.
[15] WERTZ J R.Autonomous Navigation Systems.In:Mission Geometry:Orbit and Constellation Design and Management.El Segundo[J].CA:Microcosm Press,2001,17(2):210-218.
[16] 王鵬.基于星載敏感器的衛星自主導航及姿態確定方法研究[D].哈爾濱:哈爾濱工業大學,2008.
WANG Peng.Research on Satellite Autonomous Navigation and Attitude Determination Based on Star Sensor[D].Harbin:Harbin Institute of Technology,2008.
[17] 胡小平.自主導航理論與應用[M].長沙:國防科學技術大學出版社,2002:42-73.
HU Xiao-ping.Autonomous Navigation Theory and Application[M].Changsha:National Defense Science and Technology University Press,2002:42-73.
ApplicationofUltravioletAutonomousNavigationforOrbitTransferSpacecraft
PAN Jing,YAO Hong-ying
(The Second Academy of CASIC,706 Institute,Beijing 100854,China)
To improve the performance of ultraviolet sensor applied to middle and high orbit transfer spacecraft, an autonomous navigation scheme based on ultraviolet sensor is proposed. By observing the ultraviolet image of earth with sensors, geocentric vector information is provided and then the orbit of the spacecraft can be determined. The scheme is designed without range measurements, since range error to earth is too huge to use during orbit transfer from height 1 000 km to 36 000 km. The algorithmic model is established, and simulation is taken using extended Kalman filter with orbit data and measurement data. Apart from the influence of sensor measurement precision, sampling period on the navigation accuracy is studied, and observability properties are investigated. The simulation results show that the scheme is effective and the navigation filter can also converge to acceptable accuracy.
autonomous navigation;ultraviolet sensor;orbit transfer;geocentric vector;dimensionality reduction;extended Kalman filter (EKF)
2016-12-14;
2017-02-20
有
潘靜(1990-),女,北京人。助工,學士,主要研究方向為控制科學與工程。
通信地址:100854 北京142信箱406分箱一室E-mail:panjing_6776@126.com
10.3969/j.issn.1009-086x.2017.05.011
V448.22+4;TP391.9
A
1009-086X(2017)-05-0063-09