基于正交試驗的光電立靶光幕陣列結構參數優化方法
2017-12-01 09:35:58陳瑞倪晉平
兵工學報 2017年11期
陳瑞, 倪晉平
(西安工業大學 光電工程學院, 陜西 西安 710032)
基于正交試驗的光電立靶光幕陣列結構參數優化方法
陳瑞, 倪晉平
(西安工業大學 光電工程學院, 陜西 西安 710032)
針對光電立靶光幕陣列結構參數標定誤差較大的問題,提出一種光幕陣列結構參數反演優化的方法。以測量坐標與紙板靶坐標差值的平方根構建目標函數,借助正交試驗在允許誤差范圍內產生多組不同參數量值的組合,設計了光幕陣列結構參數優化方法。以雙N形天幕靶為例,在Matlab中進行仿真,優化后的光幕陣列結構參數更接近給定真值,且結構參數的優化程度與標定的初始值和誤差范圍相關。用實彈射擊試驗對設計的方法進行驗證,結果表明,優化后的彈丸飛行參數測量結果更接近實際真值,設計的方法有效可行。該優化方法為提高光電立靶測量設備的測量精度提供了一種新思路。
兵器科學與技術; 光幕陣列; 多目標優化; 反演; 結構參數
0 引言
彈丸飛行參數是衡量身管武器性能和武器效能評估的重要指標,主要包括彈丸空間坐標、飛行速度及速度方位角和俯仰角等[1-2]。現有的彈丸飛行參數測量方法主要有:紙板靶法[3-4]、聲學法[5]、電荷耦合器件法[6-7]、光幕陣列法[8-9]。其中,光幕陣列法以其適用范圍廣、可靠性高、成本低廉等優點在靶場外彈道測量領域得到越來越廣泛的應用。若干個光幕在空間以特定的幾何結構排列,彈丸依次穿過各個光幕面,通過記錄彈丸到達每個光幕面的時刻,配合光幕陣列結構參數信息,從而解算出彈丸的飛行參數。光幕陣列空間幾何結構多種多樣,雙光幕陣列以平行結構排列,可以通過定距測時的方法測量彈丸飛行速度;四光幕陣列以雙N形結構排列,可以測量垂直入射彈丸的速度和坐標[10];六光幕陣列以雙V形或雙N形結構排列,可以測量任意角度飛行的彈丸坐標、速度及速度方位角和俯仰角[11-12]等。各種類型光幕陣列的空間結構一般通過光幕之間的夾角進行描述,它們在光幕陣列測量設備成型后通過標定的方法得到,但由于形成的光幕在空間是肉眼不可見的,無法直接測量,常常導致標定的角度誤差較大,從而影響測量精度。本文以雙N形六光幕陣列天幕立靶為例提出一種光幕陣列結構參數反演優化方法,將彈丸實際著靶坐標作為已知條件,以彈丸測量坐標與實際坐標差值的均方根構建目標函數,采用正交試驗在多組不同結構參數量值組合下尋求目標函數的最小值,最終實現光幕陣列結構參數優化。
1 雙N形光幕陣列測量原理
雙N形六光幕陣列天幕立靶的一個靶體可在空間形成一個N形光幕,兩個靶體(分別稱為啟動靶和停止靶)沿彈道線方向布置,可在空間形成雙N形排列的探測光幕。由于彈丸穿過光幕面時探測電路輸出的彈丸過幕時刻為彈丸到達每個幕面固定位置的時刻,在雙N形六光幕陣列測量原理中空間光幕可用理想平面表示[13-14]。圖1給出了雙N形六光幕陣列的測量原理,圖2是空間光幕在坐標系平面內的投影。

圖1 雙N形六光幕陣列示意圖Fig.1 Structure of double-N shaped six-light-screen-array

圖2 空間光幕在坐標系平面投影Fig.2 Projection view of light-screen structure
測量坐標系如圖1所示,s1為起始靶與停止靶靶距、h為高度差,統稱為布靶參數。圖2中實線光幕表示圖1中光幕在坐標系內的真實投影,虛線光幕表示圖1中光幕在坐標系內投影的截面,則光幕陣列空間結構參數可表示為豎直夾角α=[α1,α2,α3,α4]和水平夾角β=[β1,β2],記彈丸到達每個光幕的時刻為t1~t6,將6個光幕面G1~G6用空間平面方程表示,在靶距較短的情況下彈丸在光幕陣列內所受的空氣阻力和重力作用可忽略不計,則此過程中可假定彈丸做勻速直線運動,彈道線與空間光幕的交點以矩陣形式[14]表示為
M·X=N,
(1)

通過解算得到的彈丸在光幕G1內的空間坐標和飛行速度矢量為
X=M-1·N.
(2)
從(2)式可見,彈丸的空間坐標測量結果與光幕陣列結構參數密切相關。現有的光幕結構參數獲取方法通常需要對天幕立靶進行拆卸,再由人工標定得到光幕之間的夾角,不僅標定過程繁瑣,且得到的光幕陣列結構參數往往也存在較大誤差,若有一種方法可對標定的結果進行優化,將有效的提高光幕陣列設備的測量精度。
2 優化方法及目標函數構建
由于光幕陣列在測量過程中對彈丸的飛行軌跡不產生任何影響,在其后垂直于彈道方向再放置一個紙板靶,則可通過彈孔直接測量彈丸在紙板靶上的坐標(視為準真值),以雙N形六光幕天幕立靶為例表示上述過程,如圖3所示。
圖3 雙N形光幕陣列優化方法模型Fig.3 Optimization model of double-N shaped six-light-screen-array
圖3中S2為停止靶到紙板靶的距離,(2)式中的測量結果可從G1平面換算至紙板靶平面得到光幕陣列測量的紙板靶處彈丸坐標[15],理論上在紙板靶處光幕陣列測量的坐標與紙板靶坐標相等,但由于光幕陣列結構參數和其他誤差因素的影響,兩組坐標必然存在一定偏差,該偏差表征了光幕陣列測量結果與準真值的接近程度,在其他誤差因素不變的情況下,該偏差可以用來表征光幕陣列結構參數與結構參數真值的接近程度。
在圖3所示的模型中,將雙N形光幕陣列和紙板靶測定的兩組坐標結果分別記為(z,y)和(z*,y*),構建兩個目標函數δy和δz分別表征光幕陣列測量結果與紙板靶測量結果縱坐標和橫坐標的偏差,即
(3)
式中:n是參與優化的彈丸總數;i是彈丸序號。
由于光幕陣列測量的彈丸坐標結果是光幕陣列幾何結構的函數,其值包含了光幕陣列的結構參數信息,且在雙N形六光幕陣列天幕立靶測量模型中,空間光幕夾角一般在設備成型后固定不變。因此在其他誤差因素不變的情況下,測量公式中選取的光幕陣列結構參數越接近實際真值則兩組坐標測量結果的偏差越小,反之則越大,構建的目標函數δy和δz可分別度量結構參數在豎直和水平方向的準確度。
3 基于正交試驗設計的光幕陣列參數優化方法
將雙N形光幕陣列結構參數作為影響試驗結果的因素,基于正交試驗產生多組不同量值的結構參數組合,能充分反應全面試驗的要求。依據測量原理,坐標測量結果中縱坐標y僅受光幕豎直面夾角α的影響,而橫坐標z測量結果主要受光幕水平面夾角β的影響,因此本文依據(3)式設計兩組連續試驗先后對α=[α1,α2,α3,α4]和β=[β1,β2]進行優化。
首先將[α1,α2,α3,α4]作為影響試驗結果δy的4個因素即待反演優化參數,將標定的結果[α1o,α2o,α3o,α4o]作為初始值,在初始值附近選擇標定誤差±ε作為實際光幕夾角可能出現的范圍生成5水平,對應的因素水平表如表1所示。
選取正交表L25(56)對表1中的4個參數設計4因素5水平試驗,過程中由于β對立靶縱坐標測量結果沒有影響,其值代入標定的初始值[β1o,β2o]不變,在α標定的初始值[α1o,α2o,α3o,α4o]附近產生25種不同形式的正交組合,不同的參數組合下對應的彈丸縱坐標y隨之變化,進而引起目標函數δy的變化,假設試驗中目標函數的最小值出現在第j組,則此時光幕夾角α與實際情況最接近,其對應的光幕陣列豎直方向夾角[α1j,α2j,α3j,α4j]即為α優化后的結果。

表1 豎直面內夾角因素水平表
之后對水平面內夾角β進行優化,由于[β1,β2]決定彈丸著靶橫坐標z的測量結果,此時目標函數變為δz,待反演優化的參數只有兩個,根據正交規則β1的每一個水平和β2的每一個水平都需產生組合,以標定結果[β1o,β2o]作為初始值,在初始值附近選擇標定誤差±ε作為實際光幕夾角可能出現的范圍生成5水平,對應的因素水平表如表2所示。

表2 水平內夾角因素水平表
與α的優化過程類似將表2中的2個5水平因素填入正交表L25(56)的前2列產生25種正交組合,取α為之前優化得到的結果[α1j,α2j,α3j,α4j]不變,則不同的參數β組合下目標函數δz取值發生顯著變化,假設試驗中目標函數的最小值出現在第k次試驗,則對應的[β1k,β2k]即為水平夾角優化后的結果。至此通過兩次連續試驗可對雙N形六光幕天幕立靶的6個光幕空間結構參數完成反演優化。
4 仿真分析及優化
在Matlab中建立雙N形六光幕陣列模型,假定光幕陣列結構參數的真值為α1=α2=α3=α4=25°,β1=β2=24°,并在模型中精確給定,在上述真值附近±0.6°隨機生成一組數字作為光幕陣列結構參數的標定結果:α1o=25.4°,α2o=25.5°,α3o=24.9°,α4o=24.5°;β1o=23.5°,β2o=23.6°;構建500 mm×500 mm靶面并生成n=15發彈丸穿過靶面,生成彈丸的飛行參數為彈速v=(720±30)m/s,速度俯仰角γ=0°±4°,速度方向角θ=0°±4°.
用第3節設計的方法,選擇ε=0.6°作為各夾角真值可能出現的范圍,對生成的標定結果進行仿真優化,得到所有組合下目標函數的最小值δy,min=1.859 4,δz,min=8.562 6對應的結構參數優化結果見表3.
表3 雙N形光幕陣列仿真結果
從表3可見,仿真優化后各結構參數的取值更接近于給定真值。
為研究不同參數初始值和參數范圍ε對本文方法的影響,取ε=0.3°和ε=0.9°在真值附近重新隨機生成兩組天幕立靶初始結構參數并用第3節設計的方法對其進行仿真優化,兩次仿真得到所有組合下目標函數的最小值分別為δy,min=1.502 3,δz,min=4.511 4和δy,min=2.134 7,δz,min=12.396 1,對應的結構參數初始值和優化后的結果分別見表4和表5所示。
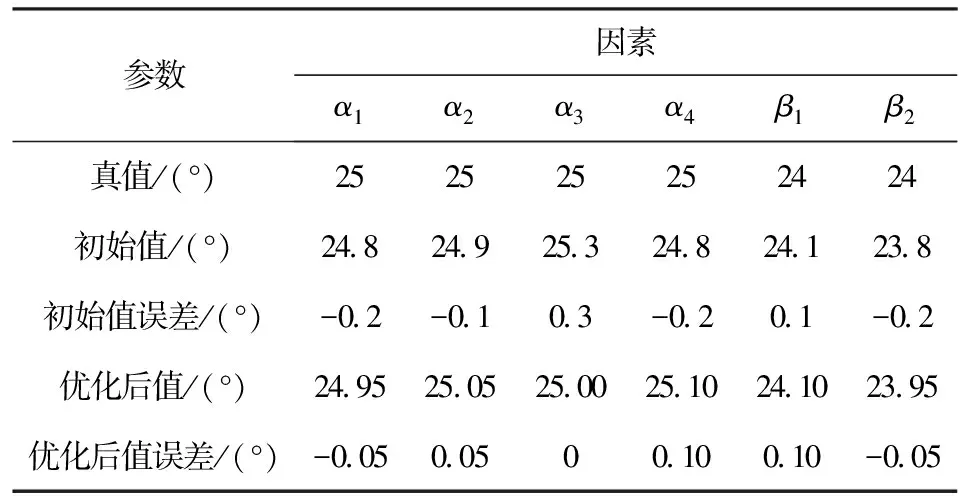
表4 雙N形光幕陣列仿真結果(ε=0.3°)
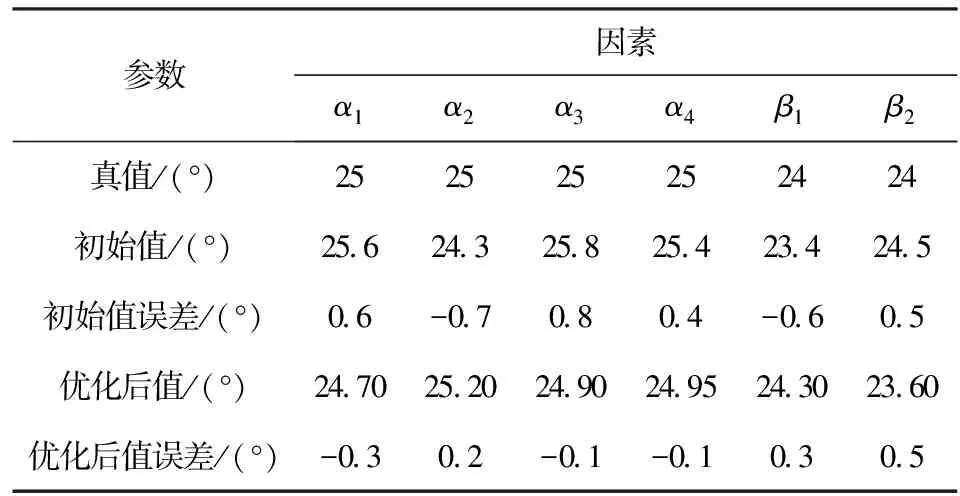
表5 雙N形光幕陣列仿真結果(ε=0.9°)
從表4和表5中可以看出,本文方法對光幕陣列結構參數的優化程度與光幕陣列結構參數的標定方法相關,標定精度高的方法初始值相對準確、參數誤差范圍(步長)ε較小,優化結果也越好。另外還需要注意的是,理論上為了減小隨機誤差,此方法在實際工程應用時選取的彈丸總數不宜過少,為了盡可能地使試驗簡化,在射擊過程中可使參與優化的彈丸在靶面內均勻分布,在減小射擊次數的同時反映空間不同位置處的光幕陣列結構信息,從而保證反演優化結果的精度。
5 實際測試驗證
依據圖3所示的模型,用雙N形光幕陣列天幕立靶工程樣機進行試驗,試驗現場如圖4所示。

圖4 試驗現場Fig.4 Photo of testing site
采用木板貼坐標紙的方式構成500 mm×500 mm紙板靶后方放置收彈箱,圖4中激光水平儀、投線儀等用于保證立靶與紙板靶間相對關系,布靶過程中起始靶與停止靶高度差h=0 mm、距離s1=4 724 mm,停止靶與紙板靶距離s2=1 400 mm. 用氣槍進行20次射擊使彈丸均勻分布在整個靶面,分別記錄每發彈丸穿過光幕陣列的過靶時刻序列和彈丸在紙板靶上的彈孔坐標,用本文方法將彈丸過靶時刻序列代入不同試驗序號下對應的光幕陣列結構,解算天幕立靶著靶坐標,并換算至紙板靶所在的平面與紙板靶坐標進行比對,計算得到對應的目標函數值。
以所選雙N形光幕陣列標定值作為初始值,精度取ε=0.6°,優化前后的結構參數如表6所示。
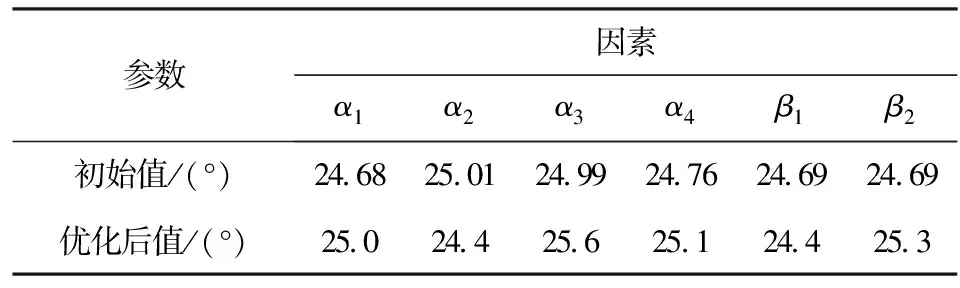
表6 雙N形光幕陣列實彈試驗結果

圖5 優化前后測量結果比對Fig.5 Comparison of measured results of structure parameters before and after optimization
為驗證本文優化結果的正確性,將優化后的雙N型光幕陣列天幕立靶在室外重新進行15次隨機射擊,分別用優化前后的兩組結構參數對著靶坐標進行測量,對優化前后結構參數下測量結果與紙板靶的偏差進行統計,結果如圖5所示。
從圖5可以看出,兩組試驗結果與實際彈孔坐標的測量誤差在橫坐標、縱坐標方向分布一致,均在0 mm的上下波動,但在初始結構參數下測量結果偏差的誤差絕對值及波動較大,優化后的結構參數下測量結果偏差的誤差絕對值及波動較小。試驗驗證了本文方法可以實現雙N形天幕立靶光幕陣列結構參數的優化,優化后的光幕陣列測量結果與彈丸實際著靶坐標相比誤差更小。
6 結論
光幕陣列方法測量彈丸飛行參數,結構參數的準確性直接影響測量精度,以天幕立靶為例,本文提出了一種光電立靶光幕陣列結構參數優化方法,用于提高其準確性。得到主要結論如下:
1) 將彈丸的彈孔坐標作為準真值,以測量坐標與彈孔坐標差值平方根最小為原則構建目標函數,借助正交試驗表設計反演方法,實現了光幕陣列結構參數優化。
2) 在Matlab中進行仿真,結果顯示用設計的方法優化后的雙N形光幕陣列結構參數更接近給定真值,且結構參數的優化程度與結構參數標定的初始值和誤差范圍相關。
3) 用實彈射擊試驗對設計的方法進行驗證,結果表明,優化后的彈丸飛行參數測量結果更接近實際真值,設計的方法有效可行。
本文方法可減小光電立靶測量設備結構參數的標定誤差,為提高該類設備的測量精度提供了一種新思路。
References)
[1] 王昌明. 實用彈道學[M]. 北京:兵器工業出版社, 1994.
WANG Chang-ming. Utility ballistics[M]. Beijing: Publishing House of Ordnance Industry, 1994. (in Chinese)
[2] Stepanov E, Vavilov S A. The main problem of external ballistics[J]. Computers & Mathematics with Applications, 1997, 33(5):95-101.
[3] David C, Smith P E. Line of sight beyond line of sight advanced technology demonstrator[C]∥40th Annual Armament Systems: Gun-Ammunition-Rockets-Missiles Conference & Exhibition. New Orleans, LA, US: Department of Defense, 2005.
[4] Corriveau D. System modeling of a 40 mm automatic grenade launcher[C]∥42nd Gun and Missile Systems Conference & Exhibition. Charlotte, NC, US:NDIA, 2007.
[5] Canistraro H A, Jordan E H. Projectile-impact-location determination: an acoustic triangulation method[J]. Measurement Science and Technology, 1996, 7(12):1755-1760.
[6] 劉澤慶, 張玉榮, 趙建新, 等. 基于數字攝影測量的靶場高速攝影測速方法[J]. 彈道學報, 2015, 27(4):47-51.
LIU Ze-qing, ZHANG Yu-rong, ZHAO Jian-xin, et al. High-speed photography velocity measurement in range based on digital photogrammetry[J]. Journal of Ballistics, 2015, 27(4):47-51.(in Chinese)
[7] Ma W H, Dong T, Tian H, et al. Line-scan CCD camera calibration in 2D coordinate measurement[J]. Optik, 2014, 125(17): 4795-4798.
[8] Gauthier Jr L R., Drewry Jr D G, Brunner L. Optical sensor and method for detecting projectile impact location and velocity vector: US, US6931166[P]. 2005-08-26.
[9] Kalonia R C, Chhachhia D P, Bajpai P P, et al. Multiple laser-based high-speed digital shadowgraphy system for small caliber projectile-target interaction studies[J]. Optical Engineering, 2014, 53(3):034104.
[10] HPI.B572 optical target system[EB/OL]. [2015-03-08]. http:∥www.hpi-gmbh.com/redesign/products_10.htm.
[11] Li H S, Gao J C, Wang Z M. Object location fire precision test technology by using intersecting photoelectric detection target[J]. Optik, 2014, 125(3): 1325-1329.
[12] 田會, 倪晉平, 焦明星. 拋物線彈道彈丸飛行參數測量模型與精度分析[J]. 儀器儀表學報, 2016, 37(1):67-74
TIAN Hui, NI Jin-ping, JIAO Ming-xing. Projectile flying parameter measurement model of parabolic trajectory and precision analysis[J]. Chinese Journal of Scientific Instrument, 2016, 37(1):67-74.(in Chinese)
[13] 張斌, 趙冬娥, 劉吉, 等. 基于重心法的激光光幕彈丸過把信號特征點提取算法[J]. 火炮發射與控制學報, 2015, 36(3):68-71.
ZHANG Bin, ZHAO Dong-e, LIU Ji, et al. Algorithm of extracting the moment when projectile passes through a laser screen using center of gravity method[J]. Journal of Gun Launch & Control, 2015, 36(3):68-71.(in Chinese)
[14] 倪晉平, 田會. 用于光幕測試的時刻信息提取方法研究[J]. 光學技術, 2008, 34(1):141-148.
NI Jin-ping, TIAN Hui. A study on method for acquiring moment on which a projectile going through a light screens[J]. Optical Technique, 2008, 34(1):141-148.(in Chinese)
[15] 陳瑞, 倪晉平, 侯颯. 三種著靶坐標自動測量設備精度評價方法[J]. 測試技術學報, 2017, 31(1):70-75.
CHEN Rui,NI Jin-ping, HOU Sa. Three accuracy assessment methods of automatic projectile impact coordinates measurement system[J]. Journal of Test and Measurement Technology, 2017, 31(1):70-75.(in Chinese)
OptimizationMethodofLight-screen-arrayStructureParametersofPhotoelectricTargetBasedonOrthogonalTest
CHEN Rui, NI Jin-ping
(School of Optoelectronic Engineering, Xi’an Technological University, Xi’an 710032, Shaanxi, China)
An optimization method for inversion of light-screen-array structure parameters is presented for their large calibrated errors. An objective function is established by using the square root of difference between measuring coordinates and actual coordinates, many groups of structure parameters are generated within the allowable error range based on orthogonal test, and the optimization method of light-screen-array structure parameters is designed. The simulated results of double-N shaped sky screen target in Matlab shows that the optimized results are affected by the initial value and the allowable error range, and the ball cartridge test results show that the proposed method is feasible and effective. The optimization method provides a new idea for improving the measuring accuracy of photoelectric target measuring equipment.
ordnance science and technology; light-screen-array; multi-objective optimization; inversion; structure parameter
TJ012.3+7
A
1000-1093(2017)11-2234-06
10.3969/j.issn.1000-1093.2017.11.021
2017-04-12
國家自然科學基金項目(61471289); 陜西省自然科學基礎研究計劃項目(2015JM5189); 陜西省教育廳重點實驗室科研計劃項目(14JS035)
陳瑞(1987—), 男, 博士研究生。 E-mail: chenrui_xatu@163.com
倪晉平(1965—), 男, 教授, 博士生導師。 E-mail: jpni@263.net
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
哲學評論(2021年2期)2021-08-22 01:53:34
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中華詩詞(2019年7期)2019-11-25 01:43:04
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
影視與戲劇評論(2016年0期)2016-11-23 05:26:01