公路平曲線超高橫坡設計
2017-12-27 02:59:02蔣立華
黑龍江交通科技 2017年10期
蔣立華
(鹽城市交通規劃設計院,江蘇 鹽城 224000)
公路平曲線超高橫坡設計
蔣立華
(鹽城市交通規劃設計院,江蘇 鹽城 224000)
針對公路平曲線超高橫坡設計,采用二次拋物線過渡方式進行設計,在明確計算方法、驗證計算結果合乎技術標準的基礎上,分析其在具體工程中設計的方法。
公路平曲線;超高橫坡;橫向力系數;設計
1 公路平曲線超高橫坡設計
超高橫坡取值主要和橫向力系數等有關,選取合理的橫向力系數和超高橫坡,對公路彎道行車安全有重要作用,其中橫向力系數通常用μ表示,超高橫坡通常用i表示。公路彎道行車,因橫向力系數不斷變化,駕車人與乘車人會有不同的感受。在設計工作中,必須確保橫向力系數合理,只有在明確橫向力系數的基礎上才可以得到最佳的超高橫坡。本文按照規范指出的橫向力系數取值,并采用二次拋物線進行過渡,對公路平曲線超高橫坡實施解算。
橫向力系數存在以下關系式
i+μ=V2/127R
(1)
式(1)中:V表示車速;i表示超高橫坡;R表示公路平曲線的半徑;μ表示橫向力系數。
式(1)右側為彎道行車離心加速度,按照公式代入數據即可得出;左側為抵抗這一離心加速度的橫向力系數及超高橫坡。想要通過計算得出超高橫坡,需要知道橫向力系數及超高橫坡的實際分配。
考慮到超高橫坡和曲線曲率有正比例關系,最大的超高橫坡出現在曲線曲率的最大點,此時會使半徑較小的曲線有較大超高橫坡,而半徑較大的曲線卻有較小的超高橫坡,導致橫向力系數偏大,不符合規范要求;如果公路平曲線上的車輛均按照設計時速行駛,借助橫向力對離心力進行平衡,則在超高橫坡上升至最大值以后,余下離心力會改由橫向力承擔,可以解決上述情況下產生的缺陷,但在實際情況中,車輛實際速度通常很難和設計時速完全相同,應以通常情況下為研究對象,確保它們安全行駛。
圖1表示公路平曲線半徑和超高之間的關系與超高值設計計算,圖中的③是將②作為基礎通過改進獲得的,其中②表示的公路設計時速,而③為實際車速。圖中的④主要是在①、②間連接一條曲線,若曲線曲率相對較小,則可按接近③進行取值,借助一定超高橫坡對橫向力進行抵消。伴隨曲線曲率不斷增大,可以采取接近于最大超高進行超高設置,這樣可以很好的彌補以上方法存在的不足。
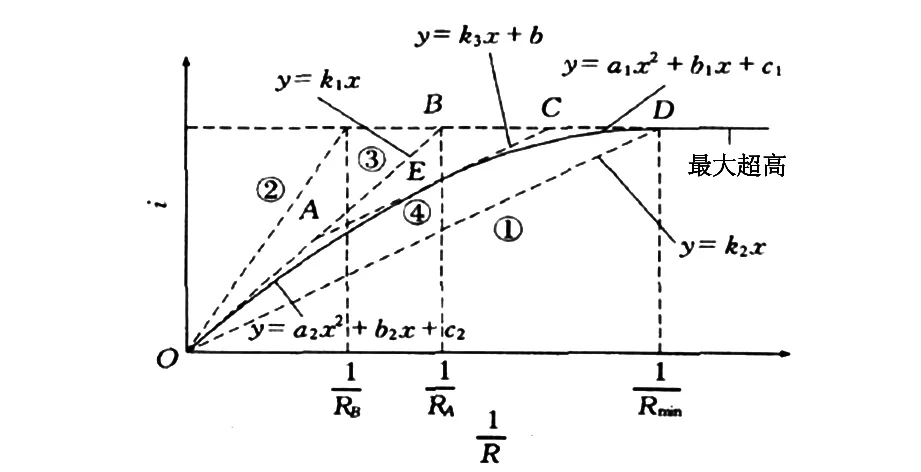
圖1 公路平曲線半徑和超高之間的關系與超高值設計計算
采用以下公式計算得出的RA表示在最大超高條件下當車輛μ等于0時的平曲線半徑。
RA=vA2/127imax
(2)
假設1/R和1/RA相等、i和imax相等,則對應圖1中的B點;假設1/R和1/Rmin相等、i和imax相等,則對應圖1中的D點。連接OB中點和BD中點,再于OAE與ECD處做兩條和直線保持相切位置關系的二次拋物線,此時二次拋物線縱坐標表示不同R值對應的設計超高。
公路平曲線實際車速取85 km/h,最大超高按8%計算,求取二次拋物線的方程。
1/R=127(i+μ)/vA2
(3)
若橫向力等于0,向式(3)中分別代入最大超高和實際車速可得RA為711.122 m;若橫向力取0.15,向式(3)中分別代入最大超高和實際車速可得Rmin為247.347 m。
分別求解y=k1x、y=k2x兩直線方程的k值,即k1為50.394、k2為19.198。在列出A點、C點和D點的坐標之后,采用A點和C點的坐標可以得出y=k3x+b直線方程的k3值和b值,即k3為19.198、b為0.025。根據A點和C點的直線方程,將1/RA代入,可得出其對應的縱坐標E(0.002,0.055)。
得到上述條件之后,可對y=a1x2+b1x+c1、y=a2x2+b2x+c2兩個二次拋物線進行求解。由于y=a1x2+b1x+c1和E點、D點相交,通過求導可得a1、b1和c1的值分別為-3 720.915、31.012和0.015,則其方程可表示為y=-3 720.915x2+31.012x+0.015,橫坐標取值區間為[1/RA,1/Rmin];由于y=a2x2+b2x+c2和O點相交,通過求導可得a2、b2和c2的值分別為-9 825.544、50.394和0,則其方程可表示為y=-9 825.544x2+50.394x,橫坐標取值區間為(0,1/RA)。
又已知實際車速為80 km/h,由此可得出圓曲線半徑、超高值與橫向力系數相互關系(見表1)。
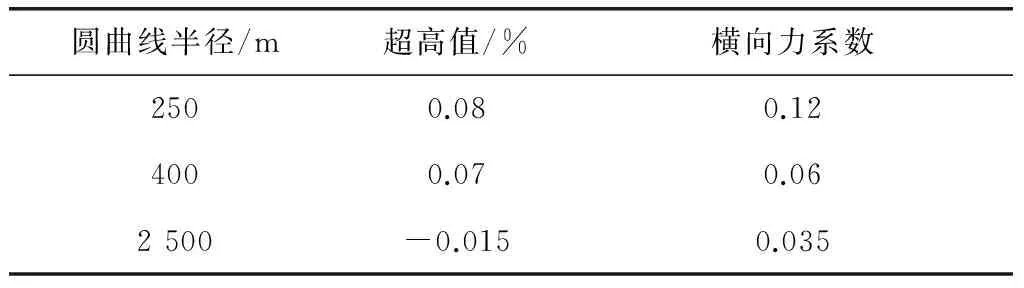
表1 圓曲線半徑、超高值與橫向
表1中,250 m為圓曲線的極限最小半徑,400 m為圓曲線的一般最小半徑,2 500 m為在不設超高條件下得出的半徑值。經驗證,上述結果和現行技術規范完全吻合。
2 公路平曲線超高橫坡設計運用
濱海縣火箭路建設工程的設計速度為60 km/h,最小平曲線半徑為650 m,一般路段道路橫坡為±2%。公路前后縱坡坡度在2%以內,超高值為8%,中小型車輛實際車速取80 km/h,最大橫向力系數取0.1,現對其超高橫坡進行設計。根據以上條件可分別得出兩條二次拋物線方程,即y=-28 569.672x2+90.709x+0.008,橫坐標取值區間為[1/1 417,1/650];y=-44 640.061x2+113.386x,橫坐標取值區間為(1/5 500,1/1 417)。
在方程y=-28 569.672x2+90.709x+0.008的橫坐標中代入1/1 100可得超高橫坡為6.7%,相應橫向力系數為0.036。
大型車輛實際車速取85 km/h,當超高值等于8%時的圓曲線極限最小半徑為316 m,最大橫向力系數保持不變,則可得兩條二次拋物線方程,即y=-7 192.098x2+45.512x+0.008,橫坐標取值區間為(1/711,1/316);y=-11 237.660x2+56.890x,橫坐標取值區間為(1/3 700,1/711)。
在方程y=-11 237.660x2+56.890x的橫坐標中代入1/1 100可得超高橫坡為4.4%,相應橫向力系數為0.01。
由于中小型車輛和大型車輛的實際車速不同,所以對應的超高橫坡也存在一定差別。若超高橫坡取7%,在式(1)中代入85 km/h,可得出橫向力系數為-0.02,說明這種情況下大型車輛行駛產生的水平分力大于離心力;同理,代入40 km/h后橫向力系數為-0.06,說明路面積雪時大型車輛行駛有向圓心處側滑的危險。因此,為確保大型車輛行駛安全,應適當降低超高橫坡;若超高橫坡取4%,在式(1)中代入120 km/h,可得出橫向力系數為0.06,滿足設計規范要求,但和設計時速為100 km/h情況下的700 m圓曲線最小半徑對應的橫向力系數相同,說明4%的超高橫坡取值較小,行車舒適度與安全性易受到影響。
綜合以上分析結論,建議該公路平曲線超高橫坡設置為5%。在這一超高橫坡條件下,當實際車速分別為120 km/h和85 km/h時對應的橫向力系數為0.05和0.02,可有效保證該路段行車安全及舒適度。
3 結 論
(1)若將摩阻力考慮為0,則要重點分析由行車速度差異造成的安全隱患,此時建議利用限制時速的方法,既要限制高速又要兼顧低速。
(2)長直線和半徑較小的曲線相連接時,因直線段車速較高,過渡至曲線后會產生很大離心加速度,為保證行車安全時應適當提高超高橫坡。
(3)車輛速度不同,在相同彎道上會產生不同離心加速度,如果存在多車道情況,則需在不同車道使用相適應的橫坡。
[1] 孫業香,吳立人.公路平曲線超高優化設計在工程實際中的運用[J].工程與建設,2014,(2):191-192+195.
[2] 嚴超群. 新建公路平曲線中的超高設計[J]. 中小企業管理與科技(上旬刊),2013,(1):121-122.
[3] 王敬一,劉亞. 公路平曲線設計中的超高設計[J]. 科技資訊,2014,(26):99-100.
U412
B
1008-3383(2017)10-0019-02
2017-04-28
蔣立華(1982-),男,工程師,研究方向:道路橋梁設計。
猜你喜歡
語數外學習·高中版上旬(2024年18期)2024-02-20 00:00:00
商品與質量(2021年43期)2022-01-18 05:31:32
中學生數理化·中考版(2021年10期)2021-11-22 07:26:38
石油瀝青(2021年4期)2021-10-14 08:50:40
人民交通(2019年16期)2019-12-20 07:04:10
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
中學生數理化·中考版(2017年10期)2017-04-23 06:29:38
中學生數理化(高中版.高二數學)(2017年1期)2017-04-16 05:33:44