諧波齒輪傳動在工業機器人領域的應用分析
2017-12-28 09:10:46王凱
裝備制造技術 2017年10期
王 凱
(咸陽職業技術學院,陜西 咸陽 712000)
諧波齒輪傳動在工業機器人領域的應用分析
王 凱
(咸陽職業技術學院,陜西 咸陽 712000)
諧波齒輪傳動以其獨有的結構特點,已成為現代工業重要的基礎部件。超過60%的諧波齒輪傳動應用在機器人工業系統中。就五自由度機械臂采用諧波齒輪傳動結構進行分析。機器人操作機構有兩種運動關節,分別是轉動關節和移動關節,關節運動最常采用伺服電機經機械傳動裝置減速后驅動。設計采用諧波齒輪傳動實現減速驅動,涉及其運動精度影響因素較多,重點分析誤差源及產生機理等情況。
諧波齒輪傳動;機器人;五自由度機械臂;運動精度
諧波齒輪傳動是二十世紀中期由美國C·Musser發明的,隨著空間技術發展,近代齒輪傳動技術也取得了重大突破。諧波齒輪傳動是一種不同于建立在剛體力學基礎上的新型機械傳動,依靠彈性變形使用柔性構件來實現傳動,它突破了機械傳動采用剛性構件的模式,從而獲得了一系列其他傳動難以達到的特殊功能,正廣泛應用于現代工業的諸多方面。本文通過檢索諧波齒輪傳動應用領域的優勢短板和發展趨勢,觀摩、借鑒國外先進技術和設計理念,探索諧波齒輪傳動裝置的設計原則、制造方法和加工技術,對諧波齒輪傳動運動精度影響因素進行分析,以解決傳統諧波齒輪傳動設計、裝配調試與生產線應用中暴露出的問題。
1 諧波齒輪概述
1.1 諧波齒輪傳動結構型式
諧波齒輪傳動主要由三個基本的構件組成,分別是波發生器、柔輪以及剛輪。可使三個構件中任意一個為固定件,其余兩個構件中一個作為主動件,另一個作為從動件,這樣就實現固定傳動比狀態下的減速或增速傳動,也可以變成兩個輸入端,一個輸出端,這樣就形成了差動傳動。
1.2 諧波齒輪傳動工作原理
諧波齒輪傳動工作原理如圖1所示。在柔性齒輪構件中,通過波發生器的作用,產生一個移動變形波,并與剛輪齒相嚙合,從而達到傳動目的。波發生器為主動元件時,凸輪在柔輪內轉動,就近使柔輪及薄壁軸承發生可控的彈性變形,這時柔輪的齒就在變形過程中進入(嚙合)或退出(嚙離)剛輪的齒間,在波發生器的長軸處處于完全嚙合,而短軸方向的齒就出在完全脫開的狀態。當電機帶動波發生器在柔輪內連續轉動時,其迫使柔輪產生連續的彈性變形,就使柔輪齒的嚙入——嚙合——嚙出——脫開四種狀態下循環往復不斷地改變各自原來的嚙合狀態(錯齒運動),作為減速器就可將輸入的高速轉動變為輸出的低速轉動,從而實現了大的減速比。
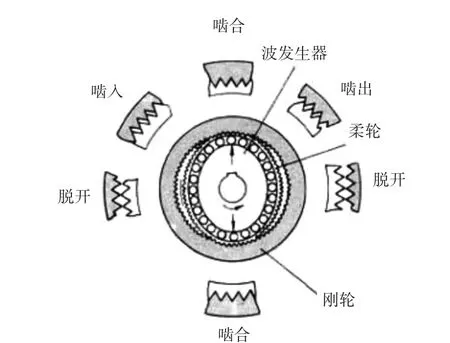
圖1 諧波齒輪傳動工作原理圖
1.3 諧波齒輪傳動特點
諧波齒輪傳動打破了古板的剛性構件死板的傳動模式,靈活的借用了柔軟的構件,完成了機械傳動的功能。其特別之處,通常是指它的傳動設備結構具有重量輕、體積小的優點,同時具備承載力大、傳動比高、效率高等優點,同軸性好,回差小,也可以向密閉的空間進行動力的傳遞。
諧波齒輪傳動是機器人實現運動功能的核心部件,是輕型工業機器人和機械臂可靠,精確運行不可或缺的零部件。目前超過60%的諧波齒輪傳動應用在機器人工業系統當中[1]。我國于2014年5月已發布《機器人用諧波齒輪減速器》標準(GB/T30819--2014)。日本本田公司仿生機器人ASIMO的手臂與腿部至少使用了24套諧波齒輪傳動裝置;美國NASN發射的火星機器人每個則使用了19套諧波齒輪傳動裝置。諧波齒輪傳動已成為現代工業重要的基礎部件。
2 工業機器人介紹
機器人(robot)是能夠根據指令自動執行工作的機器裝置,它既可以受人類實時指揮,又可以運行預先編輯的程序,還可以根據人工智能技術制定的原則綱領來完成相關工作[2]。它的任務是協助或取代人類重復性或危險性較高的工作。工業機器是機器人的一種,是面向工業領域的多關節機械手(臂)或多自由度的機器裝置。
2.1 工業機器人的基本組成
工業機器人由3大部分及6個子系統組成,如圖2所示。3大部分一是機械部分,二是傳感部分,三是控制部分。6個子系統包括機械結構系統、驅動系統、感受系統、控制系統、人機交互系統和環境交互系統。本文主要對其中的的驅動系統和機械結構系統進行說明。
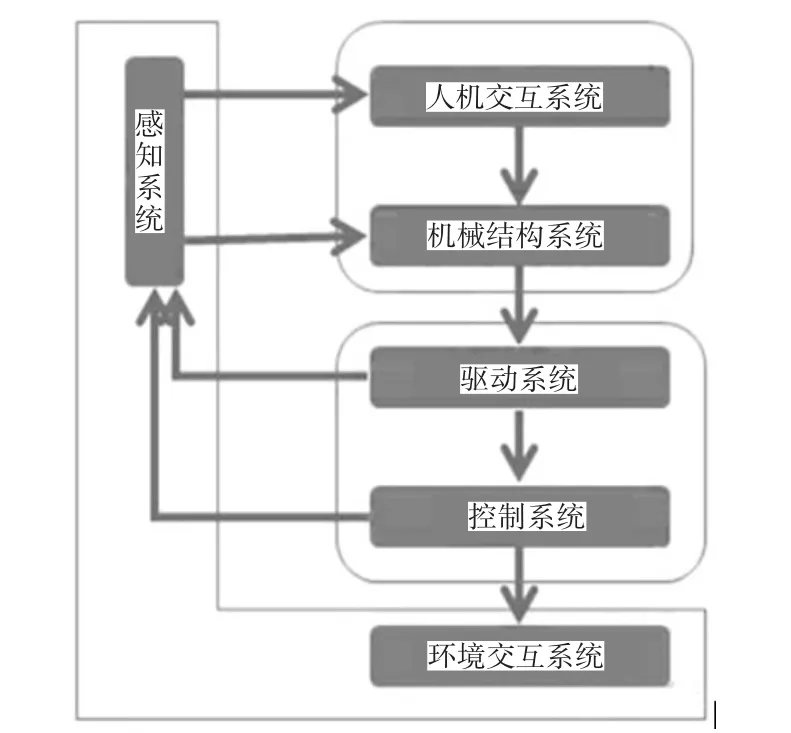
圖2 工業機器人系統組成
2.1.1 驅動系統
驅動系統是一種由多項結構組成的綜合裝置,其包括動力裝置、調節裝置、輔助裝置。要使得機器人設備正常工作,順利進行運作,就需要為機器人的不同部位裝設傳感裝置以及動力體系,這一綜合體系就是驅動系統[3]。
為機器人提供原動力常用的驅動系統有液壓傳動、氣壓傳動和機械傳動。根據需要也可由這三種基本類型組合完成復合式的驅動系統,還可以是直接驅動或者通過同步帶、輪系、諧波齒輪等機械傳動機構進行間接驅動。
2.1.2 機械結構系統
工業機器人的機械機構主要由四大部分構成:機身、臂部、腕部和手部。每一部分都有若干自由度,構成一個多自由度的機械系統,有的還增設行走機構。手部即與物件接觸的部分,常用的手部運動形式有回轉型和平移型。手腕是連接手部和手臂的部件,可用來調整被抓取物件的方位。手臂是支撐被抓物件、手部、手腕的重要部分,其作用是帶動手部去抓取物件,并按預定要求將其搬運到指定位置。
2.2 五自由度機械臂結構介紹
傳統機械臂占地空間大,在某些特定的工作場所需要一種占用空間小,動作靈活的多自由度機械臂。通過對機械臂結構分析,重點要考慮機械臂的動力源和動力傳動方式。實驗可知采用諧波齒輪驅動機械臂具有結構緊湊、傳動精度高、體積小、承載力大、重量輕等優點。如圖3所示,機械臂的運動軸包括——手臂升降軸(Arm Elevator)、手臂伸展軸(Shaulder)、夾爪傾斜軸(Tilt)、手爪旋轉(Wrist)和抓取軸(Gripper),一共為5軸,即五自由度機械臂。
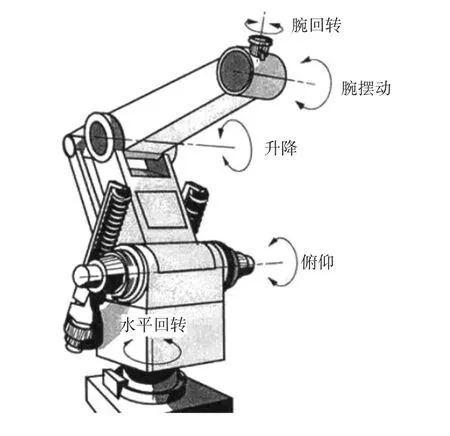
圖3 五自由度機械臂
五自由度機械臂采用一個三軸懸掛機構,外加一個腕節機構,在三維空間中實現五自由度運動。原理是:腰部的回轉是通過直流調速電機再經過一級齒輪傳動來實現;大臂、中臂和小臂的俯仰通過諧波齒輪傳動來實現;腕部的回轉則通過一級諧波再經過二級齒輪來實現。鑒于機械臂從第一關節到末端抓手的重量較大,因此第一關節處電機需要提供巨大的扭矩來啟動和制動整個機械臂,而此處電機的體積也受到一定限制,另外該處運動精度要求更高,設計為諧波齒輪傳動裝置。
3 諧波齒輪傳動運動精度影響因素分析
3.1 傳動誤差
傳動誤差是衡量諧波齒輪傳動的運動精度重要指標之一。依其薄殼彈性變形理論,對機構產生的回差、剛度誤差和傳動誤差進行分析,諧波裝置的三個部件的加工誤差以及裝配誤差,即剛輪、柔輪及波發生器部件在加工和裝配時產生的誤差,都是主要的運動誤差源[4]。諧波齒輪傳動由于具有同時參與嚙合的齒對數較多的特點,因此對運動誤差有補償作用,這就使得諧波齒輪傳動機構和普通齒輪傳動機構相比,前者的運動誤差較小。通過剛輪周節誤差的大小所引起的系統傳動精度的變化情況分析,系統的傳動精度與影響因素(剛輪周節誤差)的大小之間呈線性關系。
3.2 誤差測試
諧波齒輪傳動誤差可以通過理論計算確定,但由于影響因素較多,理論計算結果只能是近似值,而且誤差的測試大多屬于靜態測試,僅能顯示低頻成分,反映不了傳動誤差的高頻成分,因此需要設計諧波齒輪傳動誤差動態測試系統來完成。諧波齒輪傳動機構和普通齒輪傳動機構相比,前者的運動誤差曲線具有高頻化的特點,這是因為諧波齒輪機構的三個構件在加工以及安裝的過程中均出現了低頻誤差高頻化的現象。
3.3 “拍頻”現象
通過分析諧波齒輪傳動的運動誤差曲線,發現該曲線存在“拍頻”現象。諧波齒輪傳動誤差中,存在兩個頻率相差較小的傳動誤差分量,這是由于剛輪和柔輪的偏心向量產生的運動誤差頻率相差較小,這就形成了誤差曲線的“拍頻”現象。
4 結束語
諧波齒輪傳動一般都是小模數齒輪,傳動裝置都有小體積和超小體積傳動裝置的特征,應用在高精密運動控制的眾多機電一體化產品,在工業技術和自然科技領域盡顯優勢,尤其在機器人行業應用最為廣泛。諧波齒輪傳動已成為現代工業重要的基礎部件。機器人是先進制造技術和自動化裝備的典型代表,它涉及機械、電子、自動化控制、計算機、人工智能、傳感器、通信和網絡等多個學科,是多種高新技術不斷發展的綜合體現,因此它的發展與眾多學科發展緊密相連。
[1]李召華,楊 帆,韓 梅.諧波齒輪傳動裝置的傳動精度分析[J].機電產品開發與創新,2010,23(2):9-11.
[2]王保軍,滕少峰.工業機器人基礎[M].武漢:華中科技大學出版社,2015.
[3]王 凱.塑料諧波齒輪傳動可行性研究[C]//烏魯木齊:新疆機械工程學會,2016.
[4]蘭 虎.工業機器人技術及應用[M].北京:機械工業出版社,2014.
Application Analysis of Harmonic Gear Drive in Industrial Robot Field
WANG Kai
(XianYang Vocational&Technical College,Xianyang Shaanxi 712000,China)
Harmonic gear drive,with its unique structural characteristics,has become an important basic component of modern industry.More than 60%of harmonic gear drive is applied in robot industrial system.The harmonic gear drive structure of five degree of freedom mechanical arm is analyzed.The robot operating mechanism has two kinds of motion joints,which are rotating joint and moving joint,and the joint motion is most often driven by servo motor,which is driven by mechanical transmission.The design uses harmonic gear drive to realize the deceleration drive,which involves many factors affecting the motion accuracy,and analyzes the error source and the mechanism.
harmonic gear transmission;robot;5-DOF manipulator;motion precision
TP242.2
B
1672-545X(2017)10-0003-03
2017-07-23
王 凱(1962-),男,陜西咸陽人,副教授,本科,研究方向:機械工程。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
電腦報(2019年40期)2019-09-10 07:22:44
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
家庭影院技術(2017年9期)2017-09-26 03:41:45