純電動汽車動力匹配及校驗仿真
2017-12-28 09:10:46丁舟波李晨旭張君浩
裝備制造技術 2017年10期
關鍵詞:汽車
丁舟波,李 彬,李晨旭,張君浩
(中原工學院,河南 鄭州450007)
純電動汽車動力匹配及校驗仿真
丁舟波,李 彬,李晨旭,張君浩
(中原工學院,河南 鄭州450007)
以某款純電動汽車為例,根據其基本技術參數和設計要求,建立數學模型并對該車的電機和電池進行參數匹配,利用MATLAB對其動力性進行仿真分析,結果表明,動力參數匹配合理,滿足純電動汽車動力性要求。
MATLAB;純電動汽車;參數匹配;仿真分析
0 引言
汽車動力性是汽車各種性能中最基本、最重要的性能[1]。所以,研究純電動汽車的動力性對于其車輛性能有著重要的意義,而動力參數的合理匹配又對于提高純電動汽車動力性起到關鍵作用。本文根據現有的某純電動車電機和電池數據進行參數匹配研究,提高純電動汽車動力性。
1 純電動汽車的動力系統結構
1.1 純電動汽車的組成及主要參數
電動汽車的動力系統主要由四個部分組成,即電動機、動力電池、傳動系以及控制系統[2]。表1為參考的純電動汽車的主要參數。
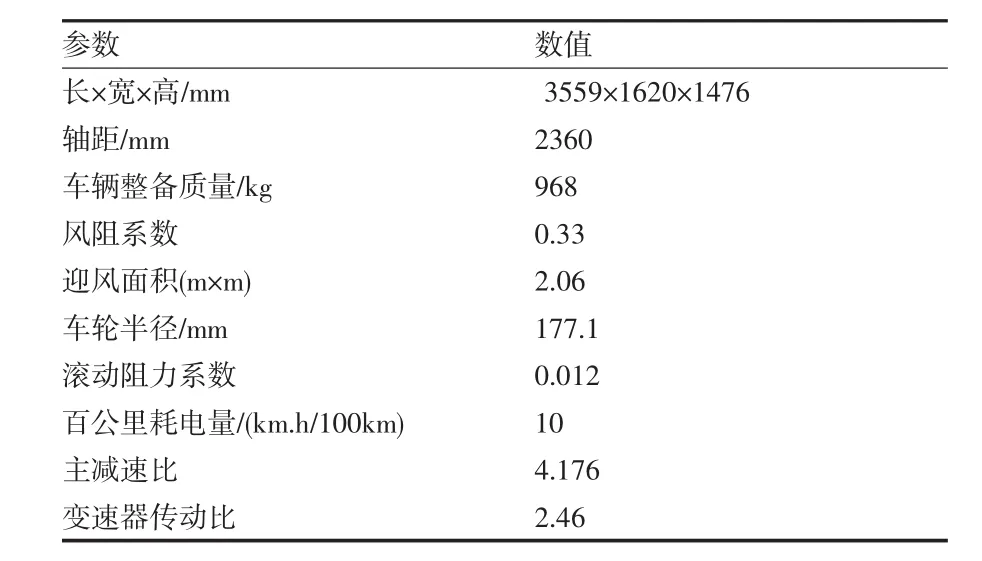
表1 純電動汽車的整車主要參數
1.2 純電動汽車動力性能要求
車輛動力性的三大指標分別是最高車速、加速時間以及最大爬坡度,所以主要按照這三個方面得到純電動汽車的設計要求如表2所示。
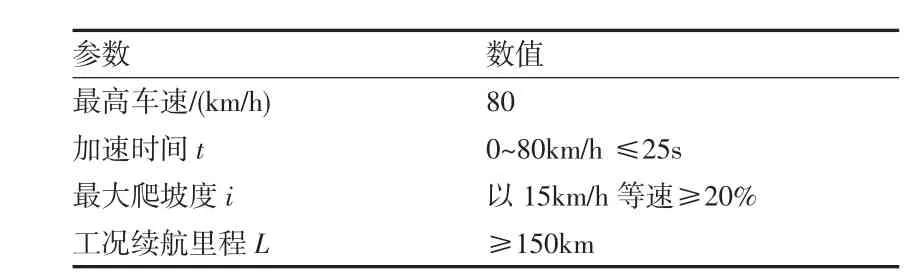
表2 設計要求
2 純電動汽車動力參數匹配
2.1 驅動電機匹配
城市電動汽車經常出現停車、加減速和爬坡等過程,所以電動汽車的電機往往不在額定的工作狀態,它對轉矩的動態要求很高。因此,不僅需要依據電機持續功率,而且需要獲取電機的最大轉矩、最大功率以及最大轉速。
2.1.1 電機轉矩
電機最大轉矩應該滿足最大爬坡度的設計要求,所以當汽車用一檔以最大爬坡度要求爬坡時,速度為15 km/h,不存在加速阻力,故應該滿足公式:

2.1.2 電機功率
電機功率一般分為瞬時功率(即最大功率)和持續功率(即額定功率)。
首先以滿足最高穩定行駛車速來確定最大額定功率,經單位換算后得到汽車功率平衡方程式:

其中Pemax為最大額定功率,umax為汽車穩定行駛的最高速度。求得Pe≥8.94 kW.
當車輛達到設計要求的最大速度時,車輛的最大額定功率也可以確定下來[3]。
然后根據汽車爬坡度來確定其最大功率,故有公式:

其中Pmax1為電機所需的最大功率,由以上公式求得Pmax1≥17.75 kW.
2.1.3 電機轉速
電動汽車以最大速度行駛的工況對應的是電機的最大轉速,所以有公式:

式中np為電機的最大轉速,求得np≥5 006.52 rpm,同時如果代入常規車速,取值35 km/h可以得到電機的額定轉速為nm=2 190.35 rpm.
結合上述結論確定電機參數如表3所示。
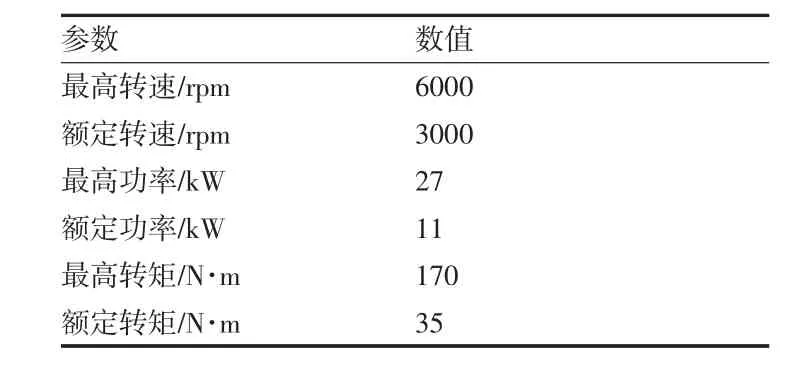
表3 電機基本參數
2.2 電動汽車電池的匹配
2.2.1 電池類型的選擇
電池技術是電動汽車的瓶頸,所以選擇合適的電池類型對于汽車而言尤為重要[4],綜合考慮整車的性能和成本等各項因素后,選用鋰離子電池最為合適。
2.2.2 電池參數匹配
首先計算出電池的實際能量W實(kW/h):

其中Ue指電池組的平均電壓(V);C指單體電池的容量(Ah).
然后計算出電動汽車所需要消耗的能量W需,先假設汽車正常行駛速度ve以40 km/h勻速行駛,計算出所需功率P需,有:


得到電動汽車行駛里程s所需的能量W需必須滿足W實≥ W需.
最后,由上述條件可以算出純電動汽車的巡航里程s為:s=Ue×C×ξ×Ve/P需.
其中ξ為電池的有效放電容量,取0.8.所以勻速下續航里程按照150 km計算的話,選擇電池組電壓為336 V,則由此公式計算出電池容量C=39.4 Ah,所以初步確定電池組的總電壓為336 V,容量為50 Ah.前面忽略了附件的功率消耗,相關資料表明電動汽車附件的能量消耗大約占整車能量的15%左右,所以真正所需要的能量還應該除以85%,在與電池的實際能量作比較。計算得W實=16.8 kW,W需/85%=12.47 kW,滿足設計要求。
所以選擇電池參數如表4所示。

表4 磷酸鐵鋰電池主要參數
3 動力參數匹配結果驗證
根據上述計算結論,并根據汽車理論知識,利用動力因子對車輛動力性進行評價。建立純電動汽車的仿真模型,進而對純電動車的動力性能,即最高車速、加速時間以及爬坡度進行結果驗證。
3.1 加速時間驗證
根據已知的驅動電機的外特性、傳動系統的效率以及整車的基本參數,通過簡單的數學計算,可以得到汽車速度0~80 km/h的加速時間:

其中,v1為加速測試時對應的初始車速,取值為0;v2為加速測試時對應的末速度,取值22.22 m/s;Tp(v)代表電機的外特性轉矩。通過MATLAB計算模型得到結果如下。
由圖1可知汽車速度從0~80 km/h的加速度時間為21.42 s.
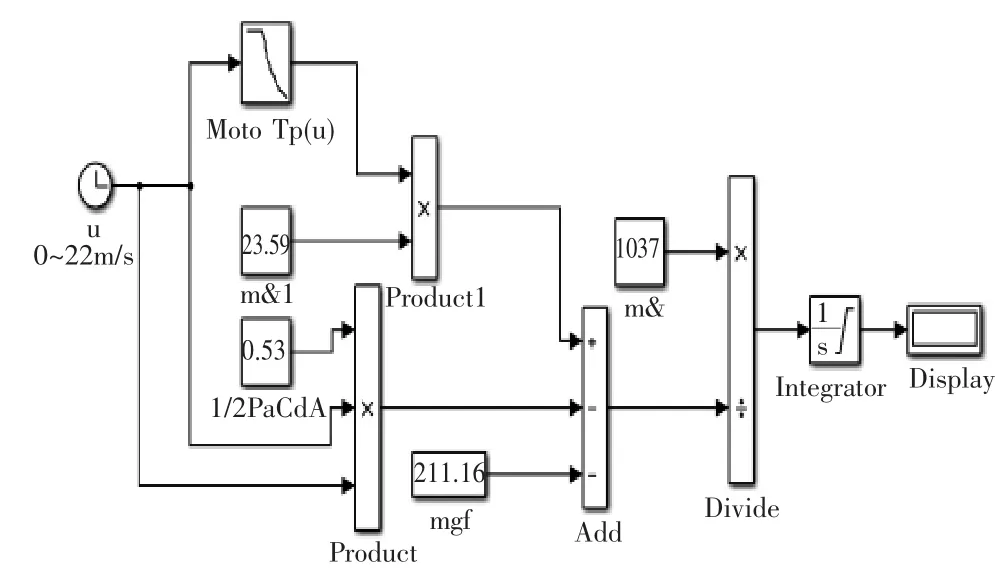
圖1 加速性能的仿真計算模型
3.2 爬坡度和最高車速的驗證
依據已知的電機外特性數據和整車參數,利用MATLAB軟件將其編寫成m文件并運行程序,然后將離散的數據點擬合整理得到驅動力行駛阻力平衡圖和車速爬坡度曲線(如圖2、圖3).
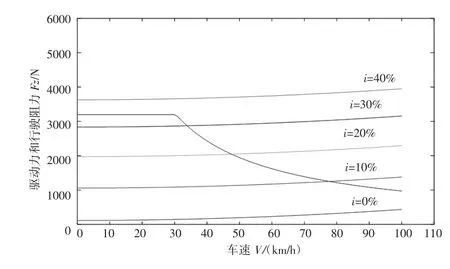
圖2 驅動力行駛阻力平衡圖
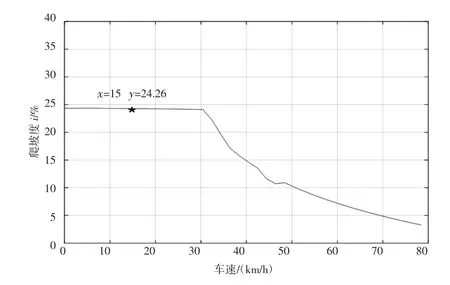
圖3 車速爬坡度曲線
圖2 中間的斜線表示電機作用在車輪上的驅動力,其余的5條線表示車輛分別在0、10%、20%、30%、40%的爬坡度的條件下所對應的行駛阻力。由圖2可知,當i為零時,即車輛在平坦的路面行駛,行駛阻力曲線與驅動力曲線是沒有交點的,此時車輛的最高車速由電機的最大轉速決定。因此,當電機轉速為6 000 rpm時,計算得到對應的最高車速為95.875 km/h.由圖3可知,當下車速為15 km/h時,對應的最大爬坡度24.26%.
由表5可以看出,純電動汽車的動力系統的參數設計滿足整車動力性的指標要求,同時也驗證了文中所匹配的參數與設計方法的可行性[5]。
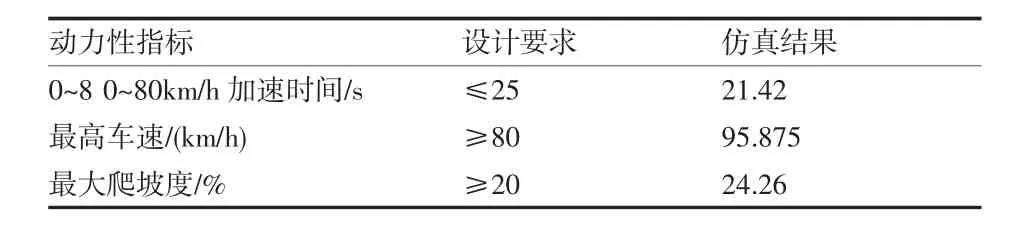
表5 整車動力性能指標驗證結果
4 結束語
以某款純電動汽車為例,根據其動力性能要求,對其機電傳動系統進行匹配計算,并驗證了其可行性,該純電動車傳動系統匹配方法對整車模型的搭建與系統工程的實現具有理論指導意義。
[1]余志生.汽車理論[M].北京:機械工業出版社,2009:7-8.
[2]李夏楠.純電動汽車動力參數優化方法仿真研究[D].武漢:武漢理工大學,2013.
[3]James T,Darren B.The Lotus Range Extender Engine[J].SAE,2010(1):25-30.
[4]郭自強.電動車電池的發展現狀[J].電池工業,2008(1):55-59.
[5]何小明.電動汽車動力蓄電池系統仿真及其管理系統的研究[D].上海:上海交通大學,2004.
Power Matching and Calibration Simulation of Pure ElectricVehicle
DING Zhou-bo,LI Bin,LI Chen-xu,ZHANG Jun-hao
(Zhongyuan University of Technology,Zhenzhou 450007,China)
Taking a pure electric vehicle as an example,according to the requirements of the basic technical parameters and design,establish mathematical model and matching of the car’s motor and battery parameters,using MATLAB simulation analysis,the dynamic performance results show that the reasonable matching of the dynamic parameters,to meet the requirements of electric vehicle.
MATLAB;pure electric vehicle;parameter matching;simulation analysis
U469.72
A
1672-545X(2017)10-0006-03
2017-07-30
河南省高等學校重點科研項目計劃(17B120003)
丁舟波(1974-),男,浙江舟山人,講師,博士,主要研究方向為新能源汽車及電池SOC分析。
猜你喜歡
人民交通(2020年22期)2020-11-26 07:36:44
小學生優秀作文(低年級)(2020年4期)2020-07-24 08:31:08
汽車與安全(2019年9期)2019-11-22 09:48:03
汽車與安全(2019年8期)2019-09-26 04:49:10
汽車與安全(2019年5期)2019-07-30 02:49:51
汽車觀察(2019年2期)2019-03-15 06:00:06
汽車與新動力(2018年2期)2018-05-09 00:31:56
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50