模糊聚類的多雷達航跡關聯算法*
2018-01-02 17:25:40張良陶海軍楊釩王驚曉
現代防御技術 2017年6期
關鍵詞:關聯
張良,陶海軍,楊釩,王驚曉
(陸軍軍官學院a.軍用光電工程教研室;b.研究生管理大隊;c.高等教育研究室,安徽 合肥 230051)
0 引言
隨著科技高速發展,現代作戰越來越依賴高精度的雷達系統進行有效的對敵軍目標進行定位,這就要求在戰爭中需要依靠多雷達對設定目標進行全方位、全天時以及全天候的定位探測,多雷達系統分布獨立定位設定目標,這就需要設置多個傳感器對目標航跡進行測量,對被測目標航跡進行關聯及融合處理,得到設定目標航跡的狀態估計,形成系統航跡[1]。
雷達系統對目標進行精確定位的前提是對目標的航跡進行精確估計,多雷達系統的各個傳感器將各自測量信號發送到其自帶跟蹤器形成局部航跡周期性的送往融合中心進行航跡融合,形成系統航跡,因此,對于此多傳感器系統測量的航跡關聯是影響雷達系統數據融合精度的較為重要的因素[2]。
目前對于航跡關聯較為常用的方法主要為:人工智能算法以及灰色理論等。人工智能算法的計算速度較快,但是需要大量的精確數據作為其關聯基礎,并且對參數實測數據精度要求較高[3]。而灰色關聯理論對于參數實測數據質量要求較低,但是其算法本身只能是對目標航跡的局部進行最優化處理[4]。
目前已經報道文獻中,主要是基于模糊理論[5-6]以及統計理論[7-8]對目標航跡進行關聯處理的。傳統的統計理論并不能實現對設定目標進行精確的航跡測量,如果測量信號中有大量的噪音存在,導致其不能很好的對目標航跡信息進行關聯融合。
綜上所述的各類航跡融合的問題,本文基于模糊理論對多目標模糊航跡進行關聯運算,對多傳感器測量到的多個航跡進行模糊化聚類統計,當目標眾多導致采集的數據量較大時,采用分步法對航跡信息進行模糊聚類處理,實現對多目標航跡信息數據的精確關聯融合。
1 分布的基于模糊聚類的多雷達航跡關聯算法
1.1 算法描述
(1) 設X=(X1,X2,…,Xn)′與Y=(Y1,Y2,….Yn)′為傳感器1和2的一組量測數據(列向量),模糊聚類的損失函數為[9]
(1)
馬氏距離為
d=ΔTG-1Δ,
(2)
式中:Δ=X-Y。
雷達采集數據聚類算法中心為
?i,
(3)
采集樣本的權值xk與各采集數據的聚類中心vi的隸屬度方程為
?i,k.
(4)
本文在對多雷達系統采集的數據進行航跡聚類關聯時,應先給出數據聚類關聯中心點的初始值V(0),通過迭代算法求得U(k),V(k+1),k=1,如果
(5)
ε為迭代收斂的判斷精度要求,并ε>0。
G=E[ΔΔT]=PX+PY-PXY-PYX,PX和PY分別是X和Y的協方差矩陣,PXY是X和Y的互協方差矩陣,PYX是Y和X的互協方差矩陣,有
PX=E{[X-E(X)][X-E(X)]T},
(6)
PY=E{[Y-E(Y)][Y-E(Y)]T},
(7)
PXY=E{[X-E(X)][Y-E(Y)]T},
(8)
PYX=E{[Y-E(Y)][X-E(X)]T}.
(9)
如果這2組量測數據是互相獨立的,那么PXY和PYX都是0矩陣,相應的算法是加權統計距離檢驗法;如果這2組量測數據不是獨立的,PXY和PYX不一定是0矩陣,相應的算法是修正的加權統計距離檢驗法。
(2)X和Y是否代表同一個目標的檢驗[10]
H0:d<χ2,X和Y是同一目標;
H1:d>χ2,X和Y不是同一目標。
在H0的假設條件下,統計距離d滿足自由度為狀態向量維數的χ2分布,即
(10)
式中:τ(n)為伽馬(Gamma)分布。滿足τ(n)=(n-1)!。
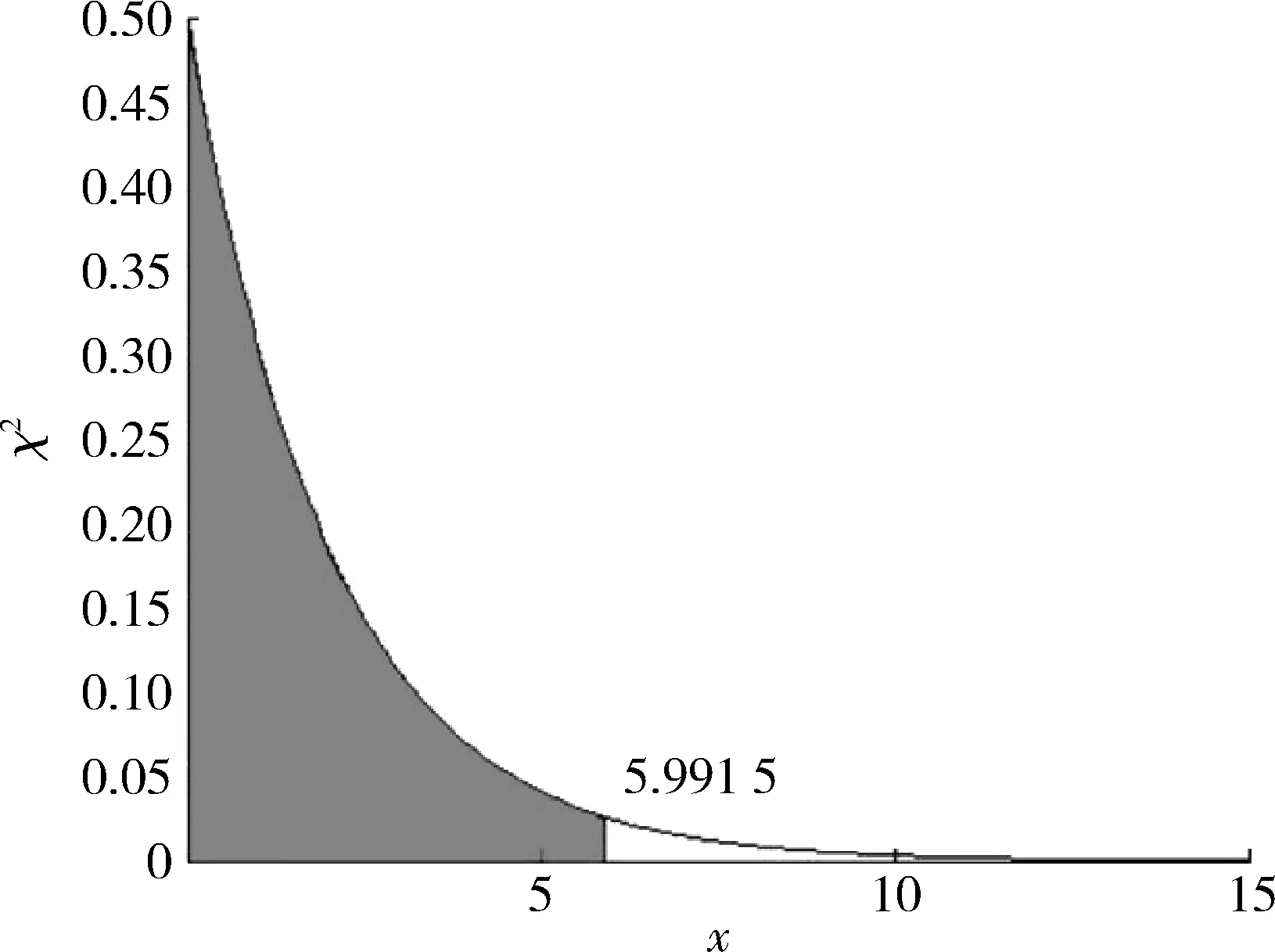
圖1 自由度為2的χ2分布Fig.1 χ2 distribution degree of freedom of 2
1.2 算法步驟
算法步驟如下[11-12]:

(1) 計算真實量測和預測值的距離
).
(11)
(2) 計算馬氏距離

(12)
(3) 對馬氏距離進行變換,這里采用變換形式如下:
y=e-x,
(13)
式中:x為馬氏距離;y為變換后的結果。
這里也可以考慮其他變換形式。
(4) 歸一化
(14)
(15)
(16)

(17)
得到的li(k)是k時刻最終的點跡選取個數。
(6) 計算li(k)個關聯概率,對這li(k)個關聯概率進行歸一化處理。
2 算法仿真[14-15]
假設跟蹤門內有3個量測,X(k)=(S(k),ST(k))T表示水平位置和水平速度構成的向量,初始值取(0, 5)T。Z(k)=S(k)表示水平位置,初始值取0。其他量取為T=1,F=(1,T;0, 1),G=(T·T/2,T)T,H=(1, 0),PD=1,PG=0.9,λ=0.5,γ=0.5,η=0.9。狀態噪聲為0均值、方差0.5的高斯白噪聲;量測噪聲為0均值、方差分別為0.5,1,3(對應3個點跡)的高斯白噪聲。仿真結果如圖2所示。
仿真結果:該算法通過閾值的選取,在保證計算精度的前提下,解決了傳統濾波跟蹤算法中計算量太大的問題,節省了計算時間,可以滿足實時性的要求。從圖2中可以看到,與量測值比較,利用該算法獲得的估計值更加接近實際數值。
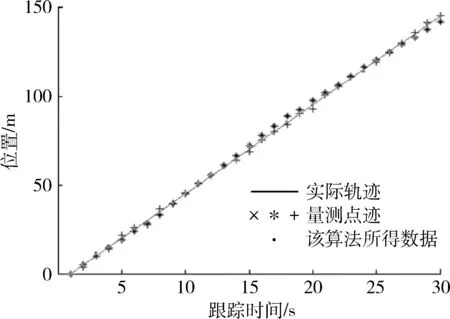
圖2 新的點跡選取方法仿真Fig.2 Simulation of new flight choosing method
為驗證本文給出的關聯算法和航跡管理表的可行性,考慮一個比較復雜的情形:①航跡距離較近的目標;②機動目標航跡;③交叉飛行目標航跡。觀測過程中有新的目標出現以及某些目標的終止。具體仿真情景如下:10個勻速直線飛行的目標,其運動速度為560 m/s,其航跡編號分別是從上到下為1~10。航跡編號1~5是航跡距離較近的目標,其間距均為560 m。6~8是機動目標航跡的目標,8~10為交叉飛行目標航跡,相鄰直線間的夾角是6°。假定在1~10 s雷達僅能檢測到航跡編號為4,5和9,10 4個目標的量測,從11~47 s所有目標的量測都可檢測到。從48~60 s,只能量測到航跡號從3~8的目標。雷達的距離量測誤差在x,y2個方向上都是60 m。

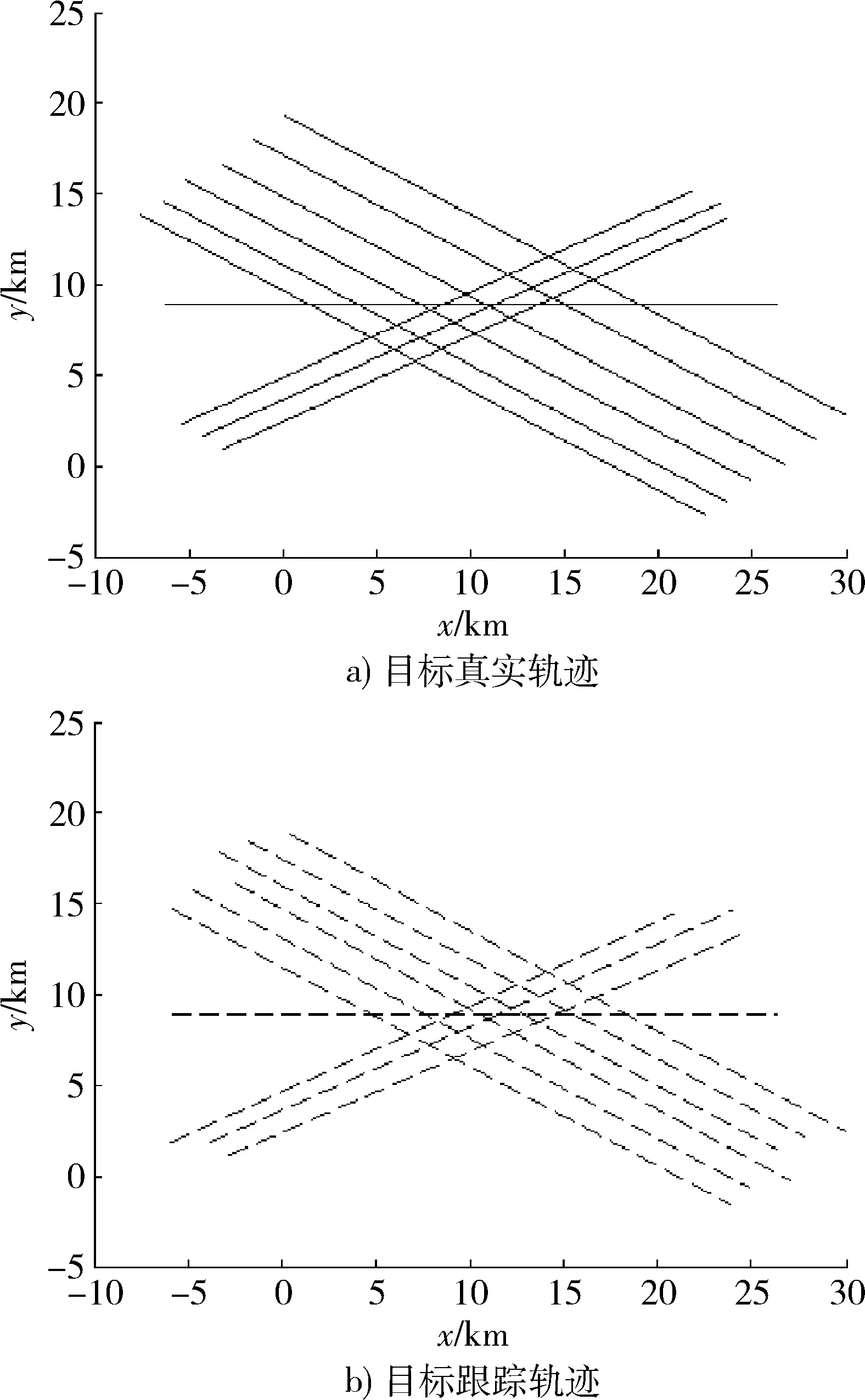
圖3 目標真實和目標跟蹤軌跡Fig.3 Target real trajectory and target tracking trajectory
圖4給出了本文所提聚類算法的目標定位算法仿真對比圖。圖4表明,雷達系統采用本文所提采集數據聚類算法對空中目標進行定位追蹤時,傳統的濾波跟蹤算法與目標真實航跡偏差較大,而采用本文的模糊數據聚類算法對空中目標進行定位時的精度較高,對于較大范圍的空中目標進行定位預測時較傳統的濾波跟蹤算法的精度要高出很多,更加貼近空中目標真實航跡,而對于密度較大的目標群,本文所提模糊聚類算法更加精確的對目標進行預測定位跟蹤。
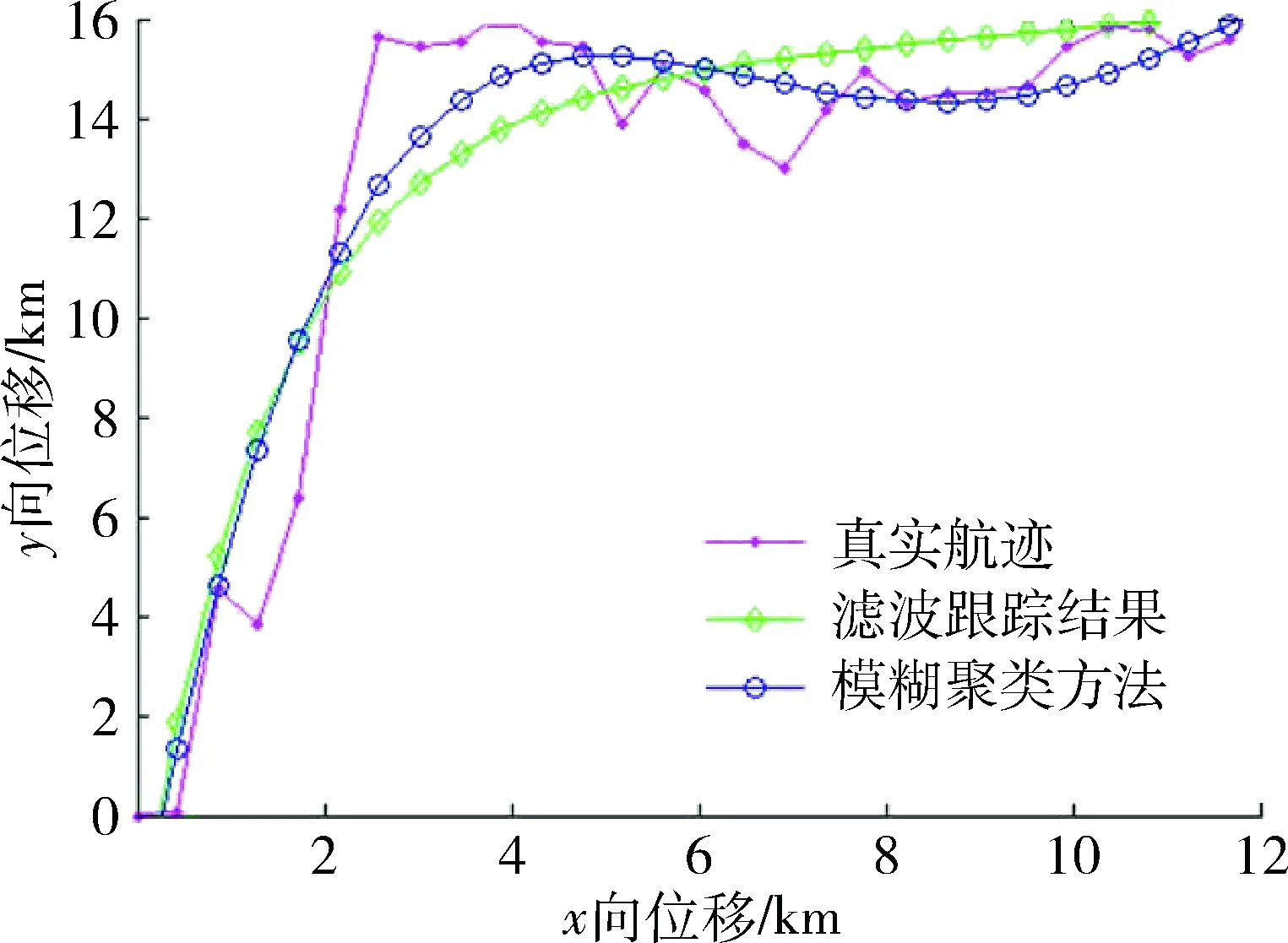
圖4 雷達跟蹤算法的跟蹤效果對比Fig.4 Tracking effect comparison of radar tracking algorithm in multisite radar
圖4表明在實際的雷達航跡測量過程中,只要設定某一合理的門限因子,就可以得到較好的追蹤效果。使用鏈路預算分析來確定檢測門限的方法對航跡探測準確率具有較高的探測精度,所以在門限因子確定后如何應用門限檢測方法,具有較高的探測航跡準確度。
綜上所述,基于模糊聚類算法對雷達系統中的定位具有較高的精度,其計算時間較之傳統濾波跟蹤算法相差不大,因此可以在雷達系統對目標定位追蹤等領域進行大規模應用。
3 結束語
本文基于模糊聚類算法對雷達定位技術中的多目標數據關聯進行了仿真研究,首先介紹了模糊聚類算法的原理并建立模型,通過設定的空中被測目標的位置,分別采用傳統濾波跟蹤算法以及本文所提算法對其進行定位跟蹤,并且將二者定位跟蹤結果與目標實際航跡進行對比分析,結果表明本文所提算法較傳統的濾波跟蹤算法精度較高,并且由于算法本身特性,其計算量亦較小,因此,現代作戰中的雷達系統采用模糊聚類算法對空中目標進行精確定位是較為可行的,并且可以較為精確的反映出實時特性。
[1] PULFORS W G.Data Fusion of Multi-Radar System by Using Gene Tic Algorithm[J].IEEE Trans on Aerospace and Electronic System,2002,38(2):601-611.
[2] 徐欣,周一宇,盧啟中.雷達截獲系統實時信號分選處理技術研究[J].系統工程與電子技術,2001,23(3):12-15.
XU Xin,ZHOU Yi-yu,LU Qi-zhong.Research on Real Time Deinter Leaving Technology for Radar Intercept System[J].Systems Engineering and Electronics,2001,23(3):12-15.
[3] Kenichi Nishiguchi,Masaaki Kobayashi.Improved Algorithm for Estimating Pulse Repetition Intervals[J].IEEE Transactions on Aerospace and Electronic Systems,2000,36(3),497-421.
[4] Stormon Charles D.An Associative Processor Architecture and Application[M].The Coherent Processor Technical Manual.Coherent Research Inc.,1991.
[5] KENNEDY J,BEERNAERT R.Particle Swarm Optimization[C]∥Proceedings of IEEE International Conference on Neutral Networks.Perth,Australia:IEEE,1995:1942-1948.
[6] LEWIS J T,P FISTER C E.Thermodynamic Probability Theory:Some Aspects of Large Deviations[J].Russian Math.Surveys,1995,50(2):279-317.
[7] SHANNON C E.A Mathematical Theory of Communication (Part I)[J].Bell Syst.Tech.J.1948(27):379-423.
[8] CHANG C S,THOMAS J A.Effective Bandwidth in High-Speed Digital Networks[J].IEEE JSAC,1995,13(6):1091-1100.
[9] CHANG C S,CHIU Y M,SONG T W.On the Performance of Multiplexing Independent Regulated Inputs[J].ACM SIGMETRICS Performance Evaluation Review,2001,29(1):184-193.
[10] 王石記,司錫才.雷達信號分選新算法研究[J ].系統工程與電子技術,2003,25 (9):1079-1083.
WANG Shi-ji,SI Xi-cai.Research on an Improved Sorting Method for Radar Signal[J].Systems Engineering and Electronics,2003,25(9):1079-1083.
[11] Seong Taek Park,JANG G,YU Lee.Improved Kalman Filter Design for Three-Dimensional Radatracking[J].IEEE Transactions on Aerospace and Electronic Systems,2001,37(2):727-739.
[12] HOLLANDS P.Use of Simulation Methods as a Design Tool in the Developments of an ESM Processing System[J ].IEE Proc,1985,24(4):292-297.
[13] 張振千,胡明寶,孟鑫,等.門限設置對雷達數據質量的影響研究[J].雷達科學與技術,2015,13(5):491-492.
ZHANG Zhen-qian,HU Ming-bao,MENG Xin,et al.Improving the Quality of Weather Radar Data Using Threshold[J].Radar Science and Technology,2015,13(5):491-492.
[14] 李國萬,索繼東,柳曉鳴.基于門限體積最小準則的認知雷達波形選擇方法研究[J].網絡與通信,2015(9):62-64.
LI Guo-wan,SUO Ji-dong,LIU Xiao-ming.Research on the Selection Method of Cognitive Radar Waveforms Based on the Minization of Criterion Gate Volume[J].Network and Communication,2015(9):62-64.
[15] 張大海,劉向陽,李華.基于滿意度門限檢測的多雷達航跡對提取研究[J].艦船電子工程,2011,31(7):67-68.
ZHANG Da-hai,LIU Xiang-yang,LI Hua.Study on Track Extracting of Multi-Radar Based on Threshold Checking of Satisfactory Degree[J].Ship Electronic Engineering,2011,31(7):67-68.
猜你喜歡
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:30
當代陜西(2021年17期)2021-11-06 03:21:36
原道(2020年2期)2020-12-21 05:47:06
當代陜西(2019年15期)2019-09-02 01:52:00
中國非營利評論(2018年2期)2018-06-18 10:48:50
學苑創造·A版(2018年11期)2018-02-01 06:29:20
自動化學報(2017年1期)2017-03-11 17:31:17
讀者(2017年5期)2017-02-15 18:04:18
西藏科技(2016年5期)2016-09-26 12:16:39
振動工程學報(2015年1期)2015-03-01 01:15:42