鉸鏈四桿機構的急回特性分析
2018-01-17 00:58:32龐立軍
鋒繪 2018年4期
龐立軍
摘要:最近幾年,在給學生講解鉸鏈四桿機構的急回特性時,我才用了項目引導教學法,用實際例子,給出任務,指導學生按照講述內容的思路,動手實做,逐步畫出分析的機構,整個過程要求學生耐心、仔細,控制作圖誤差在允許的范圍內。任務驅動,學生感到更充實,把學生摁在座位上,踏踏實實地完成任務,取得了較好的效果。
關鍵詞:鉸鏈四桿機構;極限位置;極位夾角;行程速比系數
鉸鏈四桿機構的急回特性是其重要的運動特性,它是通過機構的極位夾角和行程速比等參數反映出來的。所以,研究四桿機構的急回特性,是設計機構應用的重要知識點,全面系統的解析是我們教學工作的重要任務。下面就我在教學實施過程中的思路和過程進行闡述。
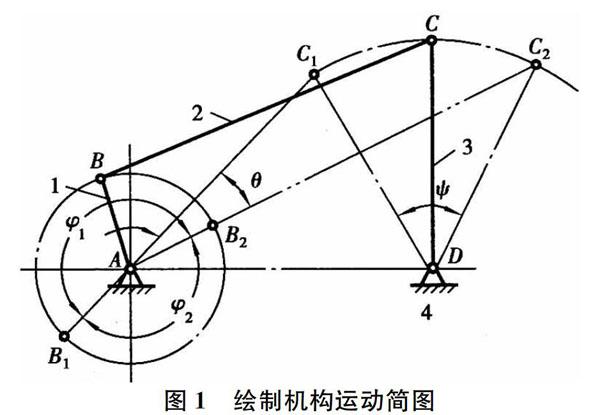
1 繪制機構運動簡圖
進行急回特性的分析,要把問題落實到實際機構中,因此,首先給出相應尺寸,繪制鉸鏈四桿機構的運動簡圖,帶著學生進行定量分析。如圖所示,該機構由4個桿,用4個鉸鏈連接而成,四個桿的長度分別為LAB=20mm,LBC=60mm,LCD=40mm,LAD=50mm,接下來需要判斷其類型。四個桿的長度滿足長度和條件,最短桿為連架桿,所以最短桿AB為曲柄,桿CD為搖桿,該機構為曲柄搖桿機構。現在明確思路,畫出該機構的運動簡圖,過程如下,在作圖平面上畫出水平線段AD,標注固定符號,設定為機架,以A點為圓心20mm為半徑畫出圓周,表明曲柄上的B點運動軌跡是該圓周,在圓周上任意確定一點B。連接AB,確定曲柄的一個任意位置,當曲柄位置確定以后,連桿BC和搖桿CD的位置相應就確定了,關鍵是找到C點,以D點為圓心40mm為半徑畫出C點運動軌跡圓弧,C點的運動軌跡是該圓弧的一段曲線,也就是說C點在這個圓弧上,再以B點為圓心60mm為半徑畫另一段圓弧,那么,兩圓弧的焦點就是C點的位置,連接B點和C點,連接C點和D點,用鉸鏈簡單符號表示4個桿的連接處,就得到了該鉸鏈四桿機構的機構運動簡圖。曲柄整周連續轉動,可以到達360度任何一個位置,搖桿在擺角范圍內來回擺動,存在左右兩個極限位置。因此,需要確定搖桿的擺動范圍,確定搖桿的兩個極限位置。機構在運動過程中,曲柄和連桿有兩次共線的位置,當重疊共線時,搖桿處于最左端,展開共線時搖桿處于最右端。所以,以A點為圓心40mm為半徑,畫圓弧與C點軌跡圓弧的交點為C1,連接C1D,此處就是搖桿的左端極限位置,連接C1A延長到B點圓周交點為B1,AB1C1D就是該曲柄搖桿機構左邊極限位置的形狀。然后,以A點為圓心,80mm為半徑畫圓弧,該圓弧與C點軌跡圓弧的交點為C2,連接C2D,此處就是搖桿的右端極限位置,連接C2A, C2A與B點軌跡圓周的交點為B2,AB2C2D就是該機構在最右端極限位置形狀。現在就展示出曲柄搖桿機構的三個位置,一個一般位置,左右兩個極限位置,C1D和C2D夾角為搖桿的行程擺角Ψ,AC1和AC2夾角θ為該機構的極位夾角。用量角器可以測量擺角θ和極位夾角Ψ。
2 急回特性的分析
設曲柄AB為原動件,則原動件AB在轉動一周過程中,有兩次與連桿BC共線,共線位置為AC1和AC2。鉸鏈中心A與C之間的最短距離為AC1,最長距離為AC2,所以,C1D和C2D分別是從動搖桿CD向左和向右擺動的兩個極限位置。對應于搖桿處于兩極限位置時曲柄所在AB1和AB2兩位置之間所夾的銳角θ稱為極位夾角。
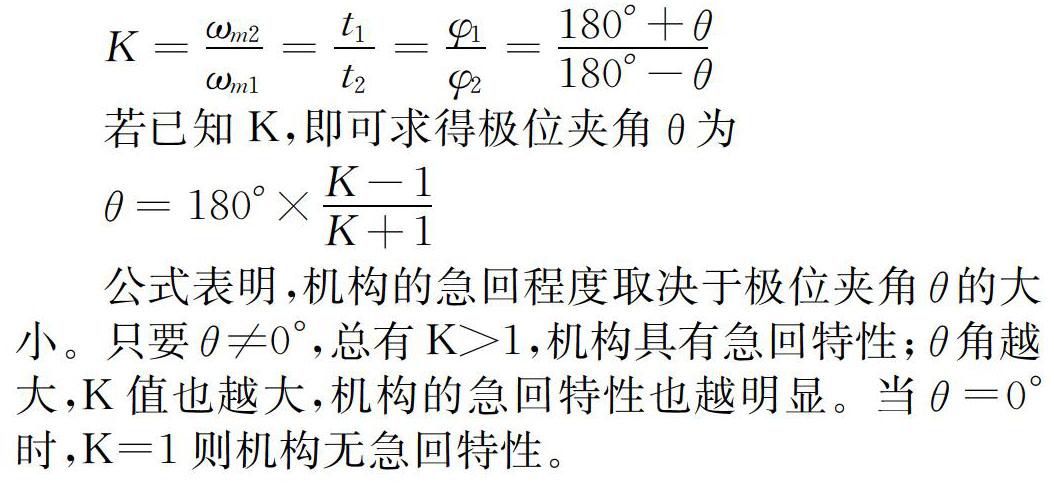
當曲柄以等角速度ω順時針轉過角φ1時,搖桿由位置C1D擺動到C2D(工作行程),擺角為Ψ,所需時間為t1,搖桿CD擺動的平均角速度為ωm1。當曲柄繼續轉過角φ2時,搖桿由位置C2D擺動到C1D(空回行程)擺角仍為Ψ,所需時間為t2,搖桿的平均角速度為ωm2。由圖可知,曲柄所對應的兩個轉角φ1和φ2分別為:φ1=180°+θ,φ2=180°-θ。由于φ1>φ2,因此曲柄以等角速度ω轉過這兩個角度時,對應的時間t1>t2,且φ1/φ2= t1/t2。搖桿CD的平均角速度為ωm1=Ψ/t1,ωm2=Ψ/t2,顯然,ωm1<ωm2。由此可見,當曲柄等速轉動時,做往復運動的搖桿在空回行程的平均速度大于工作行程的平均速度,這一性質稱為四桿機構的急回特性。機構的急回特性用ωm2和ωm1的比值K來表示,它說明機構的急回程度,通常將K稱為行程速比系數。
若已知K,即可求得極位夾角θ為
公式表明,機構的急回程度取決于極位夾角θ的大小。只要θ≠0°,總有K>1,機構具有急回特性;θ角越大,K值也越大,機構的急回特性也越明顯。當θ=0°時,K=1則機構無急回特性。
