
基于矢量控制的電動自行車控制器設計
2018-01-22 00:50:48劉鍇王宜懷徐達
現代電子技術 2018年2期
關鍵詞:永磁同步電機
劉鍇+王宜懷+徐達
摘 要: 電動自行車傳動系統中對節能和降噪的需求日益提高,相比傳統使用兩兩導通120°方波驅動方式的無刷直流電機,采用矢量控制方式的永磁同步電機具有噪聲小、能效低等優點。在滿足基本功能的前提下,設計一套低成本的控制器硬件,并描述了兩個零矢量交替使用的七段式空間矢量脈寬調制、單電阻采樣定子電流重構的基本原理、電動自行車基本功能的軟件實現。最后通過基于STM32F031C6T6的實驗平臺進行驗證,實驗結果表明,矢量控制系統對電動自行車傳動系統性能有較大提升,相比方波控制器具有更高的性價比。
關鍵詞: 電動自行車; 永磁同步電機; 矢量脈寬調制; 單電阻采樣; 電流重構; 轉矩脈動
中圖分類號: TN345+.5?34; TM301.2; TM571 文獻標識碼: A 文章編號: 1004?373X(2018)02?0111?05
Abstract: The demands of electric bicycle transmission system for energy saving and noise reduction are increased. In comparison with the traditional brushless DC motor driven in the 120° square wave drive mode with conduction in pairs, the permanent magnet synchronous motor in the mode of vector control has the advantages of low noise and low energy efficiency. Under the premise of satisfying the basic functions, a low?cost hardware of the controller was designed. The basic principle of the seven?step space vector pulse width modulation (SVPWM) that two zero vectors are utilized alternately and single?resistance sampling stator current reconstruction, and the software implementation of the electric bicycle′s basic functions are described. The controller was verified on the experiment platform based on STM32F031C6T6. The experimental results show that the vector control system can enhance the performance of the electric bicycle drive system greatly, and has higher cost performance than the square wave controller.
Keywords: electric bicycle; permanent magnet synchronous motor; SVPWM; single?resistance sampling; current reconstruction; torque ripple
現在生活空氣污染日益加劇,作為綠色交通工具的電動自行車擁有靈活、輕巧、零排放、價格低廉等優點,在我國市場保有量很大且前景十分廣闊[1]。目前為止,電動自行車的電機大都采用無刷直流電動機,這種電機控制結構簡單且生產成本較低,但其定子電流和氣隙磁通為方波或梯形波,有轉矩脈動大、靜音效果差等缺點[2?3]。隨著對電動自行車傳動系統的要求提升,近年來基于矢量控制的永磁同步電機被應用于代替無刷直流電機,用以克服以上問題。永磁同步電機的定子電流和氣隙磁通都接近正弦波,配合矢量控制器使用能明顯改善轉矩脈動和噪聲等問題[4]。本文重點介紹了七段式矢量脈寬調制(SVPWM)算法、單電阻采樣電流重構的基本原理,并在不增加成本的基礎上設計了一款基于STM32F031C6T6的矢量控制器。
1 矢量控制器系統組成及核心硬件設計
1.1 矢量控制器系統組成
1.1.1 矢量控制系統框圖
電動自行車控制器系統如圖1所示。控制器可分為電源功率電路和控制信號電路,其中電源功率電路包括48 V蓄電池電源、開關電源、驅動電路和逆變電路。控制信號電路則包括了以STM32F031C6T6為基礎的主控電路、母線電流采樣放大電路、霍爾信號電路及轉把、剎車等信號電路。
在電動自行車控制系統中,轉把將模擬信號傳入MCU的A/D輸入口經MCU解析后來控制速度。剎車、助力等模擬信號則直接轉換為高低電平傳入MCU進行解析。電流采樣電路接入主控芯片的A/D輸入口,根據實時轉子位置設定采樣點采集電流[5]。霍爾信號每次變化代表轉子轉過60°電角度,MCU通過霍爾反饋信息估算速度和加速度并據此推算轉子實時位置,根據實時電流和轉子位置加載矢量控制算法實現電機的矢量運轉。
1.1.2 矢量控制系統基本原理
矢量控制最終目的是模仿直流電機,對其定子電流的轉矩分量和勵磁分量解耦控制,實現電機轉矩和磁通的獨立控制。但一般不同控制對象下選取定子電流參考值的方式不同[6?8],針對電動自行車用表貼式輪轂電機的特點,采用Id= 0控制方式來簡化控制策略。
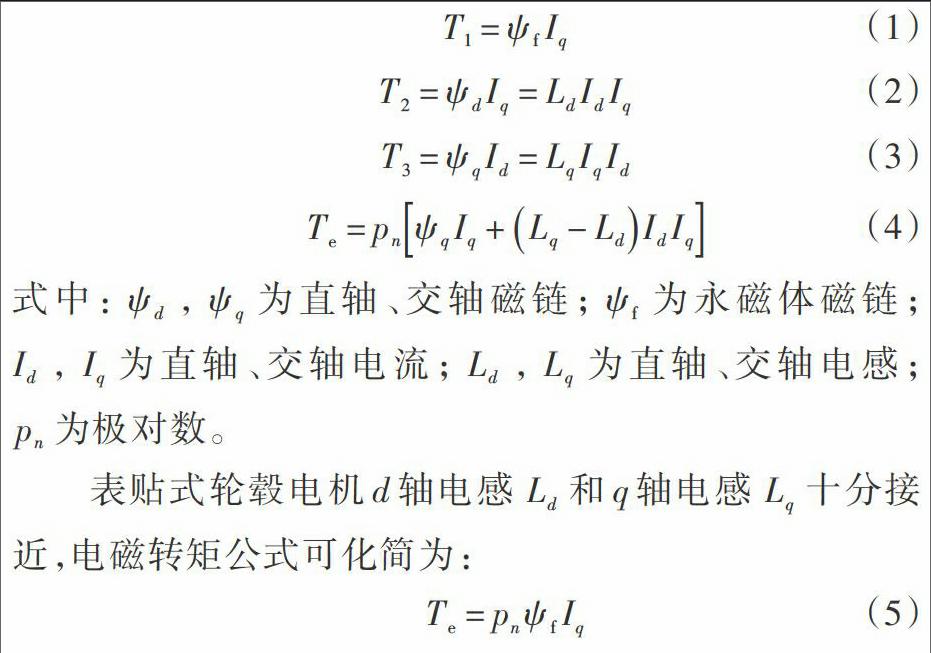
理想永磁同步電機電磁轉矩主要由三部分組成,永磁磁鏈與交軸電流產生轉矩T1,直軸磁鏈和交軸電流產生的轉矩T2,交軸磁鏈與直軸電流產生的轉矩T3,三者合成后的電磁轉矩為Te,表示如下:endprint
由上述公式可知表貼式輪轂電機電磁轉矩直接受電流控制,因此采用= 0控制,可以實現對控制策略的簡化。
根據霍爾信號的變化估算出轉速,估算出的轉速信號與轉把給定的轉速信號比較,通過PI控制器算出定子電流q軸參考值,并將d軸參考值設為0。將采集到的定子電流Ia,Ib和Ic,通過Clark變換等效成兩相靜止坐標系下的電流Iα和Iβ,再通過Park變換等效為旋轉坐標系下的直流電流Id和Iq。其中Ia相當于直流電動機的勵磁電流,Iq相當直流電動機的轉矩電流。接下來通過與它們的參考值相比較,經過PI調節器可獲得控制量Ua和Uq,這兩個控制量通過Park逆變換后變為Uα和 Uβ,最后根據SVPWM的合成方法合成所需的矢量,達到矢量控制的目的。矢量控制框圖如圖2所示。
1.2 矢量控制器核心硬件設計
矢量控制器硬件包括電源功率部分和信號控制部分,其中信號控制部分的電流采樣和電源功率部分的功率管驅動是實現矢量控制的核心環節,電流采樣一般有:電流傳感器采樣、單電阻采樣、三電阻采樣三種方法。其中電流傳感器成本過高無法滿足成本要求,三電阻采樣法需要在電路中加入三個采樣電阻使硬件設計變得復雜,綜合考慮采用單電阻的采樣方法可以控制成本并簡化設計。考慮到成本因素,功率管驅動部分采用分離器件搭建。電流采樣和功率管驅動電路圖如圖3所示。
采樣的電阻會影響系統平衡和電路效率,因此所選用采樣電阻的大小應該控制在毫歐級,具備幾十安培以上的過流能力,通過電流變化引起運放輸入端零點幾伏的電壓變化,并配合放大電路完成A/D輸入。矢量控制器中電流采樣由兩根5 mΩ的康銅絲并聯實現。它是銅鎳構成的電阻合金,其溫度系數低,工作溫度范圍寬,生產加工簡單,在焊接時可以調整焊接長度來調整阻值。
低速運放已經無法滿足矢量控制的電流采樣要求,因此使用SGM8632,SOP?8封裝的軌對軌高速運放采樣平均電流和相電流。由于運放輸入端的采樣電壓可能會產生溢出,因此通過R79,R48和R36,R69對采樣值進行電壓抬升偏移以確保采樣有效,U3A將采樣值放大8.78倍傳入MCU的A/D口用來控制平均電流,U3B去掉了輸入端的RC濾波電路且將放大倍數增至22倍,用于實時采樣相電流。
驅動部分為了滿足成本需求采用分離器件搭建,以W相為例,當上臂輸入低電平時三極管Q17打開,Q17打開后Q2隨之打開,通過D14,D4,R98,R10打開MOS管V7,反之當上臂輸入高電平時Q17關閉,Q2也隨之關閉,C15存儲的電能隨之放出,V7關閉。W相下臂驅動采取和上臂完全對稱的結構實現MOS管的打開與關閉。
2 矢量控制器核心軟件設計
2.1 七段式SVPWM算法
SVPWM是由三相功率逆變器的6個功率開關元件組成的特定開關模式產生的脈寬調制波,能夠使輸出電流波形盡可能接近于理想正弦波行。空間電壓矢量PWM與傳統正弦PWM不同,它是從三相輸出電壓的整體效果出發,著眼于如何使電機獲得理想圓形磁鏈軌跡,相比SPWM技術,繞組電流波形諧波成分小,電機轉矩脈動小,旋轉磁場更接近圓形,而且直流母線電壓利用率更高。
三相逆變橋的6個開關管,根據不同的導通狀態可以產生8種不同的電壓基本矢量。七段式SVPWM算法就是在某個時刻電壓矢量旋轉到某個區域中時,可由組成這個區域的兩個相鄰的非零矢量和零矢量在施加時間上的不同組合來得到。兩個非零矢量和兩個零矢量的作用時間在一個采樣周期內分多次施加,從而控制四個電壓矢量的作用時間,使電壓空間矢量接近按圓軌跡旋轉。
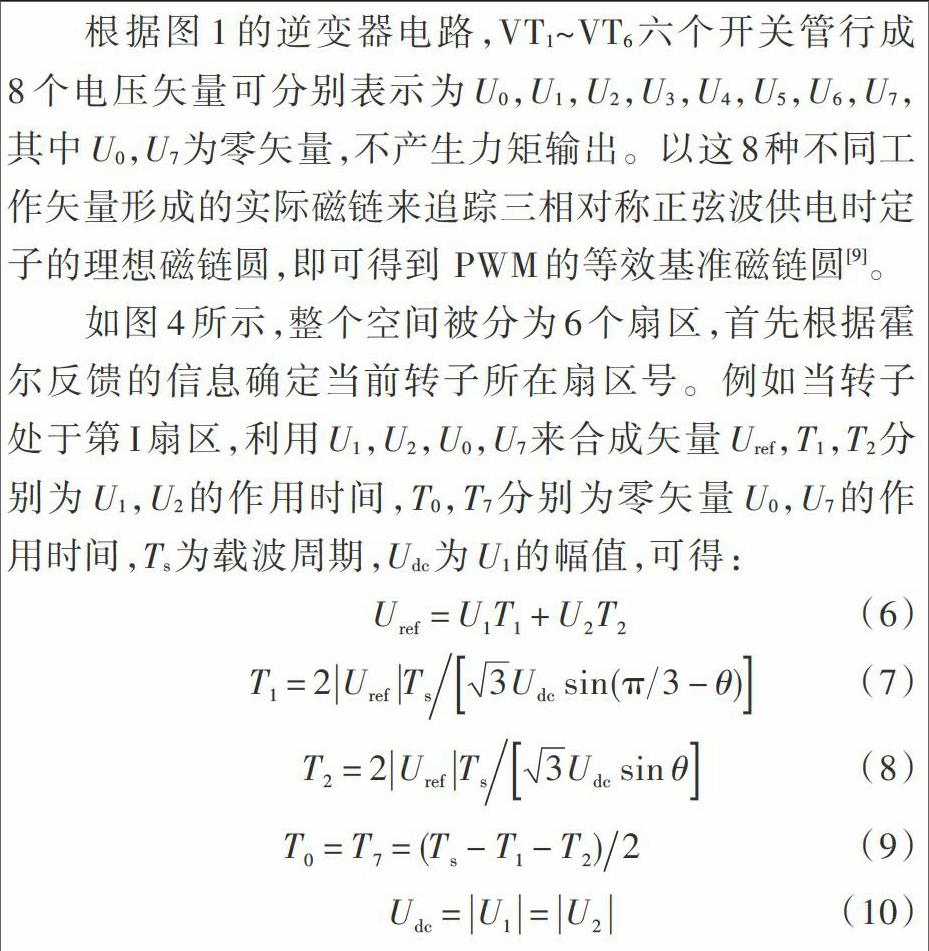
根據圖1的逆變器電路,VT1~VT6六個開關管行成8個電壓矢量可分別表示為U0,U1,U2,U3,U4,U5,U6,U7,其中U0,U7為零矢量,不產生力矩輸出。以這8種不同工作矢量形成的實際磁鏈來追蹤三相對稱正弦波供電時定子的理想磁鏈圓,即可得到 PWM的等效基準磁鏈圓[9]。
如圖4所示,整個空間被分為6個扇區,首先根據霍爾反饋的信息確定當前轉子所在扇區號。例如當轉子處于第I扇區,利用U1,U2,U0,U7來合成矢量Uref,T1,T2分別為U1,U2的作用時間,T0,T7分別為零矢量U0,U7的作用時間,Ts為載波周期,Udc為U1的幅值,可得:
依據式(6)~式(10)可以得出各個調制波的占空比,為了減少開關損耗,在每次開關狀態轉換時,只改變其中一相的狀態,并對零矢量的時間采取平均分配的方法,以使產生的PWM對稱,從而有效地降低PWM的諧波分量。仍以第I扇區為例,基本矢量的切換順序為:U0,U1,U2,U7,U2,U1,U0這一順序保證每次矢量切換只改變一相的開關狀態,是實現七段式SVPWM的最佳方法,三相PWM加載值如圖5所示。
七段式SVPWM每個周期要進行6次開關切換,PWM輸出波形完全對稱,使諧波得到了很好的抑制,電機轉矩脈動小,母線電壓利用率得到了提升。
2.2 單電阻采樣定子電流重構
矢量控制算法為了實現電流閉環控制,需要對電機的相電流進行實時檢測,為了控制成本采用單電阻的母線電流檢測方法,在一個開關周期內采集兩相電流,由于三相電流和為零,可以根據兩相電流推算另外一相電流[10]:
相電流和母線電流的關系需要根據功率管的開關狀態和相應導通相來確定,對于不同的電壓空間矢量,相電流與直流母線電流的對應關系如表1所示。
表1說明了母線電流和相電流的對應關系,在對應的開關狀態選取其中點時刻進行采樣,如圖5所示Ishunt行分別在U1,U2的中點時刻采集兩個電流值Ia,-Ic,只要開窗時間足夠長這種方法可以實現大多數位置的電流正常采樣和重構,但是在處于相鄰空間矢量邊界或低調制比狀態時,由于開窗時間無法滿足,因此需要通過插入有效矢量的方法來實現相電流的正常采樣和重構。以第一和第二扇區空間矢量的邊界為例,此時有兩個橋臂的PWM占空比幾乎相同,如圖6所示,這時在一個開關周期內只能采樣一相電流-Ic,無法完成電流重構。因此在邊界區域需要插入有效矢量來完成另一相電流采樣,如圖6所示,在時間段U7中插入一個能滿足采樣時間的有效矢量,并保持整個占空比不變,矢量插入后有足夠的開窗時間采集電流-Ia。這一方法對整個系統影響較小且可以實現轉子在邊界或低調制比區域的電流采集和重構。endprint
3 實 驗
基于以上調制算法和硬件設計,搭建以STM32F031C6T6為核心的平臺進行實驗。選擇的測試電機數據如下,額定電壓48 V,額定輸出功率為 500 W,額定轉速為460 r/min,選擇MOS管 ST100N8,80 V,100 ℃時通態電流為70 A,驅動器件采用分立器件。實物如圖7所示。
當改變轉把給定值時,可以觀測到電機速度隨之變化,改變電機負載可以觀測到電流的大小變化,電機速度保持恒定,觀測到兩個負載下的電流波形,如圖8a)和圖8c)所示,同時測量了在兩種負載下的方波控制器電流波形如圖8b)、圖8d)所示,可以看出矢量控制系統的電流波形轉矩脈動有很大改善。用分貝儀測試了在400 r/min下兩種控制器的噪聲參數,矢量控制器的噪聲峰值為53 dB,均值為49 dB,方波控制器噪聲峰值為65 dB,均值為59 dB,可知矢量控制系統對噪聲也有很大改善。
4 結 語
根據電動自行車傳動系統升級的需求,基于單片機STM32F031C6T6,設計了一套針對永磁同步電機的低成本矢量控制系統。首先對矢量系統的整體框架進行了介紹,接下來對核心硬件和SVPWM算法以及單電阻電流重構進行了詳細分析并針對一些特殊情況提出了解決方法。實驗結果表明,依據上述設計方案可以完成電動自行車矢量控制器的設計,相比傳統方波控制器具有轉矩脈動小、噪聲低等優點,且整體成本增加少,有較高的性價比。
參考文獻
[1] 陳君科,范蟠果.電動自行車控制器設計與實現[J].電力電子技術,2008,42(3):81?83.
CHEN Junke, FAN Panguo. Design and realization of electric bicycle controller [J]. Power electronics technology, 2008, 42(3): 81?83.
[2] 曾慶初.永磁無刷直流電機噪聲分析及降噪設計方法的研究[D].哈爾濱:哈爾濱工業大學,2009.
ZENG Qingchu. Permanent magnet brushless DC motor noise analysis and noise reduction design method [D]. Harbin: Harbin Institute of Technology, 2009.
[3] 李有凱,蔣玲.無刷直流電機調速系統轉矩脈動抑制方法研究[J].現代電子技術,2016,39(7):142?144.
LI Youkai, JIANG Ling. Research on torque ripple reduction of brushless DC motor speed control system [J]. Modern electronics technique, 2016, 39(7): 142?144.
[4] 江劍峰,曹中圣,楊喜軍,等.電動自行車永磁同步電機矢量控制調速策略的設計[J].電機與控制應用,2011,38(6):21?25.
JIANG Jianfeng, CAO Zhongsheng, YANG Xijun, et al. Design of permanent magnet synchronous motor vector?control speed regulation strategy for electric bicycle [J]. Electric machines & control application, 2011, 38(6): 21?25.
[5] 胡學青,陳文,郭煥銀.電動自行車控制器的硬件設計[J].電源技術,2012,36(10):1520?1523.
HU Xueqing, CHEN Wen, GUO Huanyin. Hardware design of electric bicycle controller [J]. Power technology, 2012, 36(10): 1520?1523.
[6] 劉文良,張國政.永磁同步電機單位功率因數控制[J].微電機,2012,45(2):63?67.
LIU Wenliang, ZHANG Guozheng. Power factor control of permanent magnet synchronous motor [J]. Microelectrics, 2012, 45(2): 63?67.
[7] 李長紅,陳明俊,吳小役.PMSM調速系統中最大轉矩電流比控制方法的研究[J].中國電機工程學報,2005,25(21):169?174.
LI Changhong, CHEN Mingjun, WU Xiaoyi. Research on the maximum torque current ratio control method in PMSM speed control system [J]. Proceedings of the CSEE, 2005, 25(21): 169?174.
[8] 黃坤.基于新型卡爾曼濾波的永磁同步電機無傳感器控制系統研究[D].徐州:中國礦業大學,2013.
HUANG Kun. Research on sensorless control system of permanent magnet synchronous motor based on new Kalman filter [D]. Xuzhou: China University of Mining and Technology, 2013.
[9] 陶夢江.電動自行車控制器研究與設計[D].徐州:中國礦業大學,2015.
TAO Mengjiang. Electric bicycle controller research and design [D]. Xuzhou: China University of Mining and Technology, 2015.
[10] 徐亞雷,王志川,陶夢江.輪轂電機控制器的單電阻電流重構算法研究[J].微特電機,2016,44(4):56?59.
XU Yalei, WANG Zhichuan, TAO Mengjiang. Research on single?resistor current reconfiguration of hub motor controller [J]. Small motor, 2016, 44(4): 56?59.endprint
猜你喜歡
現代電子技術(2017年1期)2017-02-16 11:49:32
汽車工程學報(2016年5期)2017-01-16 02:42:50
計算技術與自動化(2016年4期)2017-01-11 14:06:23
電子技術與軟件工程(2016年19期)2016-12-19 18:43:28
中國科技博覽(2016年15期)2016-08-23 00:59:37
電腦知識與技術(2016年13期)2016-06-29 21:41:37
科技視界(2016年12期)2016-05-25 11:07:56
電腦知識與技術(2016年2期)2016-03-22 22:21:46
電腦知識與技術(2016年1期)2016-03-22 15:49:38
哈爾濱理工大學學報(2015年6期)2016-02-18 00:26:49
