純電動Tip-In/Out工況的前饋校正與主動阻尼防抖控制?
2018-03-01 03:40:46趙治國李蒙娜
汽車工程 2018年1期
關(guān)鍵詞:系統(tǒng)
趙治國,王 晨,,張 彤,李蒙娜
(1.同濟(jì)大學(xué)新能源汽車工程中心,上海 201804; 2.科力遠(yuǎn)混合動力技術(shù)有限公司,上海 201501)
前言
復(fù)合功率分流混合動力系統(tǒng)電機(jī)直接與行星排連接,傳動系中阻尼元件不足。系統(tǒng)純電動運(yùn)行時(shí),電機(jī)轉(zhuǎn)矩響應(yīng)靈敏,在驅(qū)動轉(zhuǎn)矩及擾動的快速、大幅激勵(lì)下極易發(fā)生傳動系扭轉(zhuǎn)振動[1-2]。同時(shí),電機(jī)低速轉(zhuǎn)矩紋波也會加劇抖振幅度[3],嚴(yán)重影響整車駕乘舒適性。
文獻(xiàn)[4]中針對單級減速傳動系統(tǒng)進(jìn)行分析,定位傳動軸半徑和長度以及減速器齒輪間隙為系統(tǒng)扭轉(zhuǎn)振動的主要影響因素。文獻(xiàn)[5]和文獻(xiàn)[6]中分別應(yīng)用前饋校正和加速度反饋來抑制轉(zhuǎn)速閉環(huán)控制時(shí)的傳動系扭轉(zhuǎn)振動。文獻(xiàn)[7]中針對共振頻率超過100Hz的高速傳動系統(tǒng),采用改進(jìn)PID控制器來抑制轉(zhuǎn)速閉環(huán)控制時(shí)的傳動系扭轉(zhuǎn)振動。然而,上述策略均針對轉(zhuǎn)速伺服控制,較難直接應(yīng)用于基于轉(zhuǎn)矩控制的混合動力汽車驅(qū)動系統(tǒng)。文獻(xiàn)[3]中采用時(shí)頻分析法定位定子繞組電流階次分量引起的電機(jī)轉(zhuǎn)矩波動是導(dǎo)致車輛純電動起步縱向抖動的主要原因,通過在定子電壓矢量坐標(biāo)系中加入頻率補(bǔ)償器,以及對相電流傳感器信號進(jìn)行濾波處理,抑制電機(jī)相電流畸變。文獻(xiàn)[8]中采用車速與電流雙閉環(huán)控制策略,對純電動汽車起步平順性進(jìn)行優(yōu)化。然而,上述方案均落實(shí)在電機(jī)本體控制層面,限制了其應(yīng)用范圍。文獻(xiàn)[9]中通過細(xì)分純電動起步工況,采用多參數(shù)標(biāo)定的方法對起步平順性進(jìn)行了優(yōu)化。文獻(xiàn)[10]中設(shè)計(jì)高階濾波器將電機(jī)傳感器誤差等噪聲信號剝離,再利用PD調(diào)節(jié)器進(jìn)行反饋控制,抑制傳動系的轉(zhuǎn)速波動。文獻(xiàn)[11]中通過實(shí)時(shí)計(jì)算部件轉(zhuǎn)速跟蹤誤差,設(shè)計(jì)滑模變結(jié)構(gòu)控制器對傳動系扭轉(zhuǎn)振動實(shí)施主動阻尼控制。文獻(xiàn)[12]中基于輪速和電機(jī)反饋轉(zhuǎn)矩,利用卡爾曼濾波器對輸出端實(shí)際轉(zhuǎn)矩進(jìn)行觀測,并與期望轉(zhuǎn)矩進(jìn)行偏差控制以改善傳動系扭轉(zhuǎn)振動。然而,上述策略的控制效果依賴準(zhǔn)確的輪速信息,但車輛制動系統(tǒng)反饋的輪速信號存在通信延遲,并且在極低車速下不反饋輪速信號,其實(shí)際應(yīng)用受到限制。
本文中分別設(shè)計(jì)前饋校正和主動阻尼防抖策略,以抑制功率分流式混合動力汽車純電動工況下的傳動系扭轉(zhuǎn)振動。首先,考慮扭轉(zhuǎn)減振器、傳動軸和輪胎彈性,對復(fù)合功率分流式混合動力系統(tǒng)進(jìn)行動態(tài)建模。然后,對動態(tài)模型進(jìn)行簡化,基于頻域分析方法對系統(tǒng)扭轉(zhuǎn)振動特性進(jìn)行分析。其次,基于簡化的雙質(zhì)量模型設(shè)計(jì)前饋校正器和輪速觀測器,并對其極點(diǎn)配置方法進(jìn)行研究。最后,以純電動Tip-In/Out工況(將快速增加油門稱為Tip-In工況,將快速釋放油門稱為Tip-Out工況)為例,對兩種防抖策略進(jìn)行仿真和實(shí)車驗(yàn)證。
1 系統(tǒng)建模
1.1 結(jié)構(gòu)方案
如文獻(xiàn)[13]和文獻(xiàn)[14]中所述,復(fù)合功率分流式混合動力系統(tǒng)采用共用行星架和齒圈的雙行星排結(jié)構(gòu)。發(fā)動機(jī)經(jīng)扭轉(zhuǎn)減振器與變速器輸入軸相連,電機(jī)1和電機(jī)2分別與小、大太陽輪相連,三者動力由行星排復(fù)合后經(jīng)齒圈、傳動系傳遞至輪邊。濕式制動器1,2分別用于鎖止行星架和小太陽輪。混合動力系統(tǒng)結(jié)構(gòu)如圖1所示,雙行星排及混合動力變速器實(shí)物如圖2所示,整車及動力系統(tǒng)參數(shù)見表1。
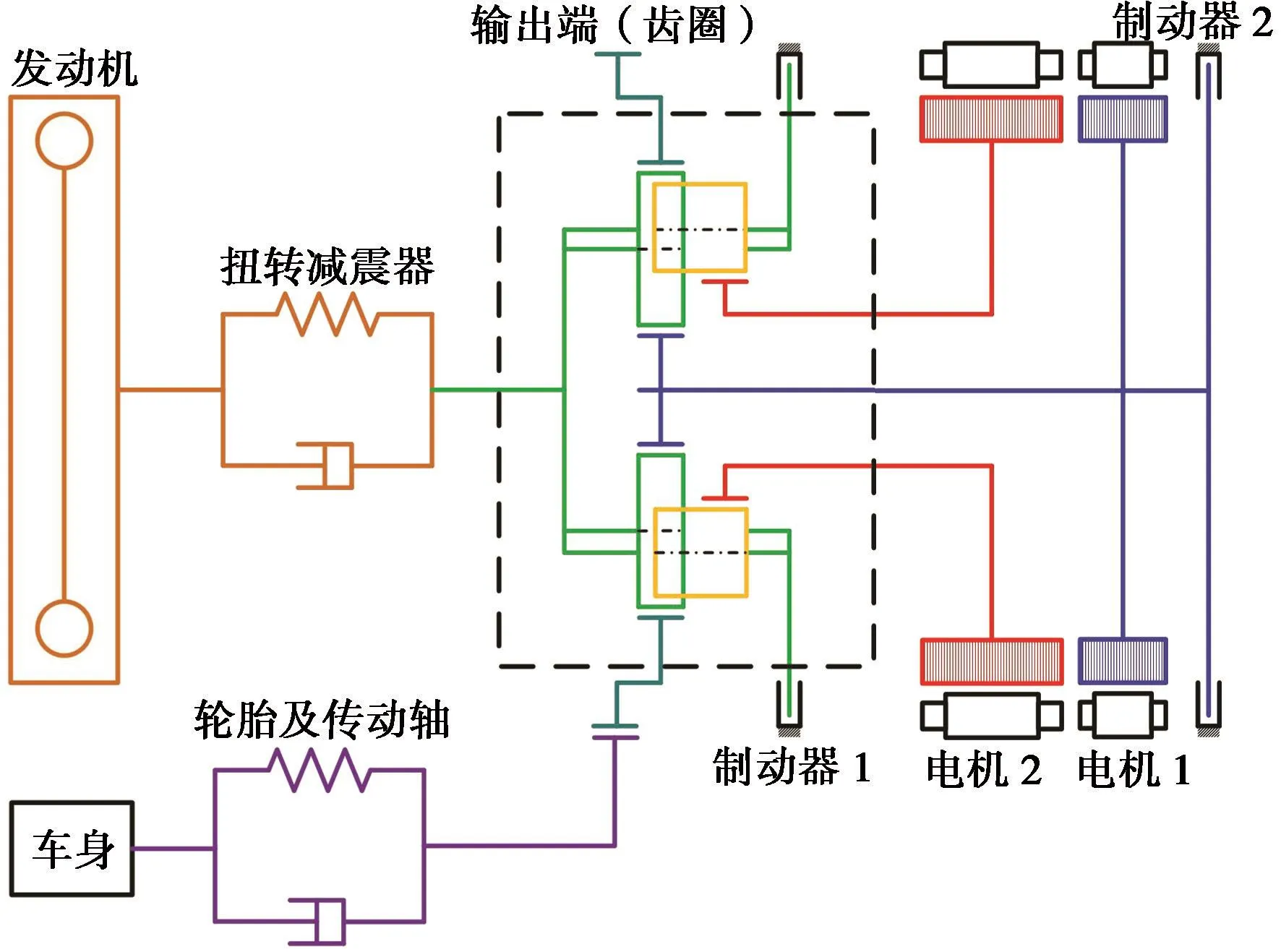
圖1 復(fù)合功率分流式混合動力系統(tǒng)結(jié)構(gòu)示意圖
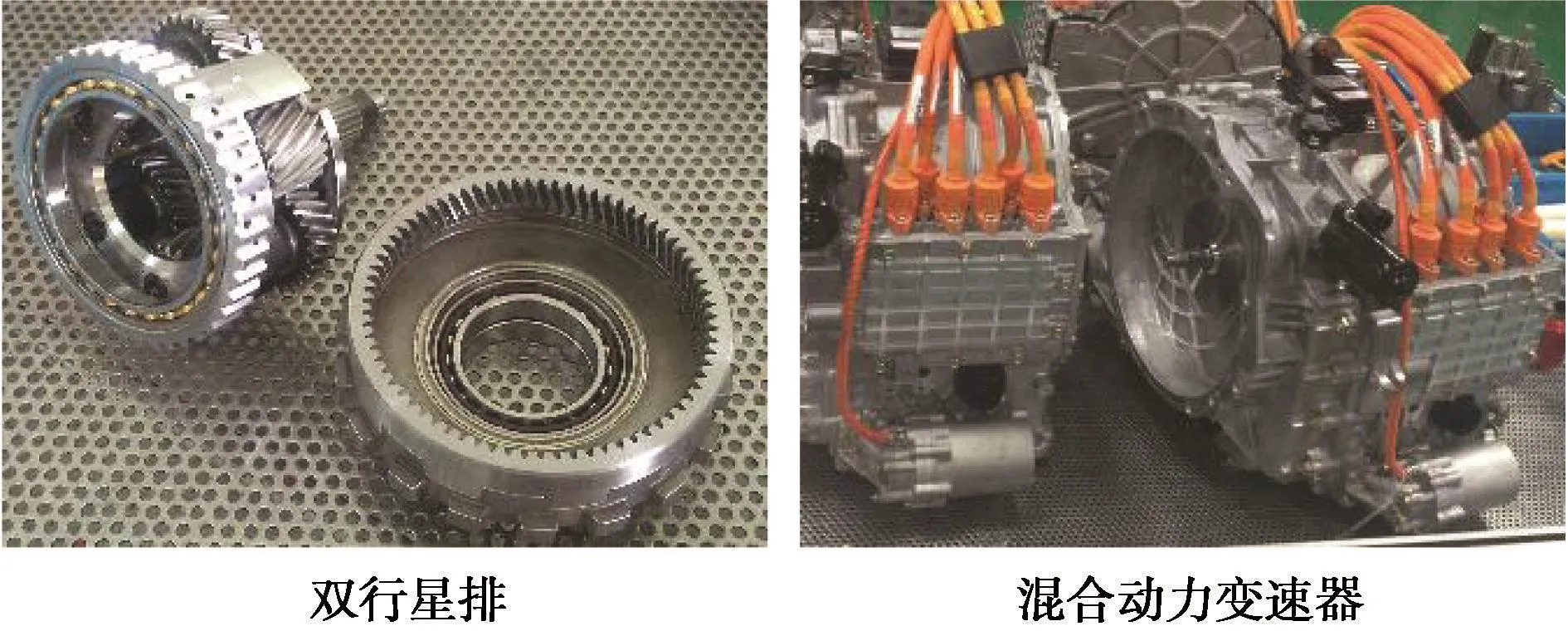
圖2 雙行星排及混合動力變速器實(shí)物
1.2 數(shù)學(xué)模型
忽略行星輪、太陽輪轉(zhuǎn)動慣量及齒輪嚙合間隙,圖1所示復(fù)合功率分流式混合動力系統(tǒng)各軸動力學(xué)關(guān)系式為


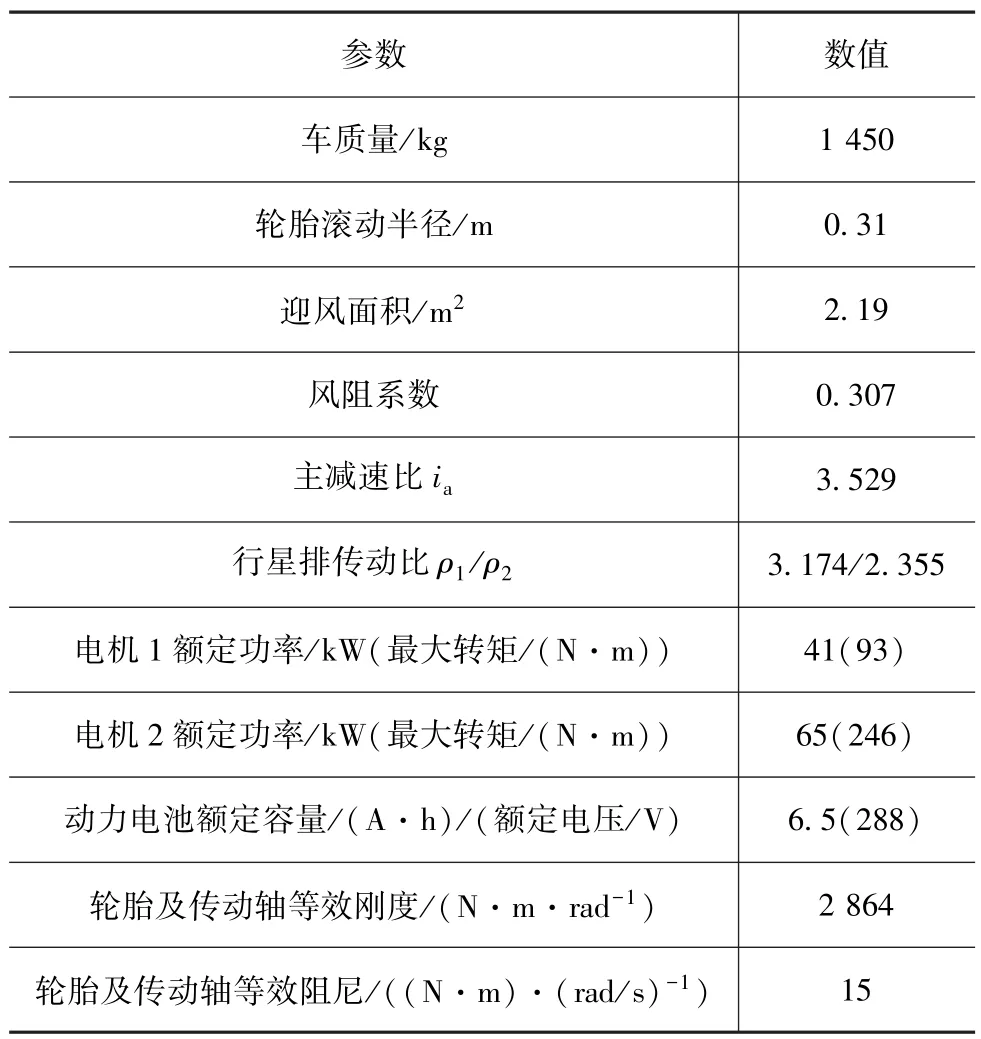
表1 整車和動力系統(tǒng)參數(shù)
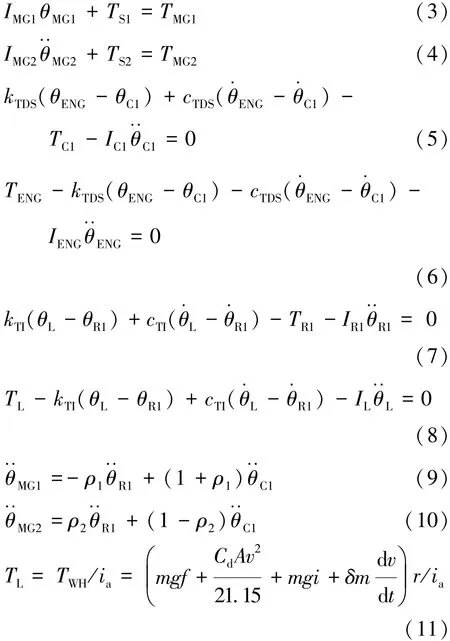
式中:I,θ和T分別代表轉(zhuǎn)動慣量、角位移和轉(zhuǎn)矩;k和c分別代表等效剛度和等效阻尼;下標(biāo) ENG,MG1,MG2,TDS,TI,L 和 WH 分別代表發(fā)動機(jī)、電機(jī)1、電機(jī)2、扭轉(zhuǎn)減振器、等效傳動系、整車和車輪;下標(biāo)S1,S2,C1和R1分別代表小太陽輪、大太陽輪、共用行星架和共用齒圈;m為整車質(zhì)量;f為滾動摩擦因數(shù);Cd為風(fēng)阻系數(shù);A為迎風(fēng)面積;v為車速;i為坡度;δ為旋轉(zhuǎn)部件的等效質(zhì)量換算系數(shù);r為輪胎半徑;ia為主減速比。
1.3 純電動模式
該復(fù)合功率分流式混合系統(tǒng)包含制動器1鎖止和打開兩種純電動模式。為充分發(fā)揮系統(tǒng)純電動模式下的動力性和經(jīng)濟(jì)性,優(yōu)先采用制動器1鎖止的純電動模式[15]。此時(shí),電機(jī)1和電機(jī)2可分別以速比ρ1,ρ2驅(qū)動車輛前行。兩種驅(qū)動方式僅存在傳動比和傳動效率上的差別。下文僅以電機(jī)2單獨(dú)驅(qū)動為例進(jìn)行論述,該模式等效杠桿[16]如圖3所示。
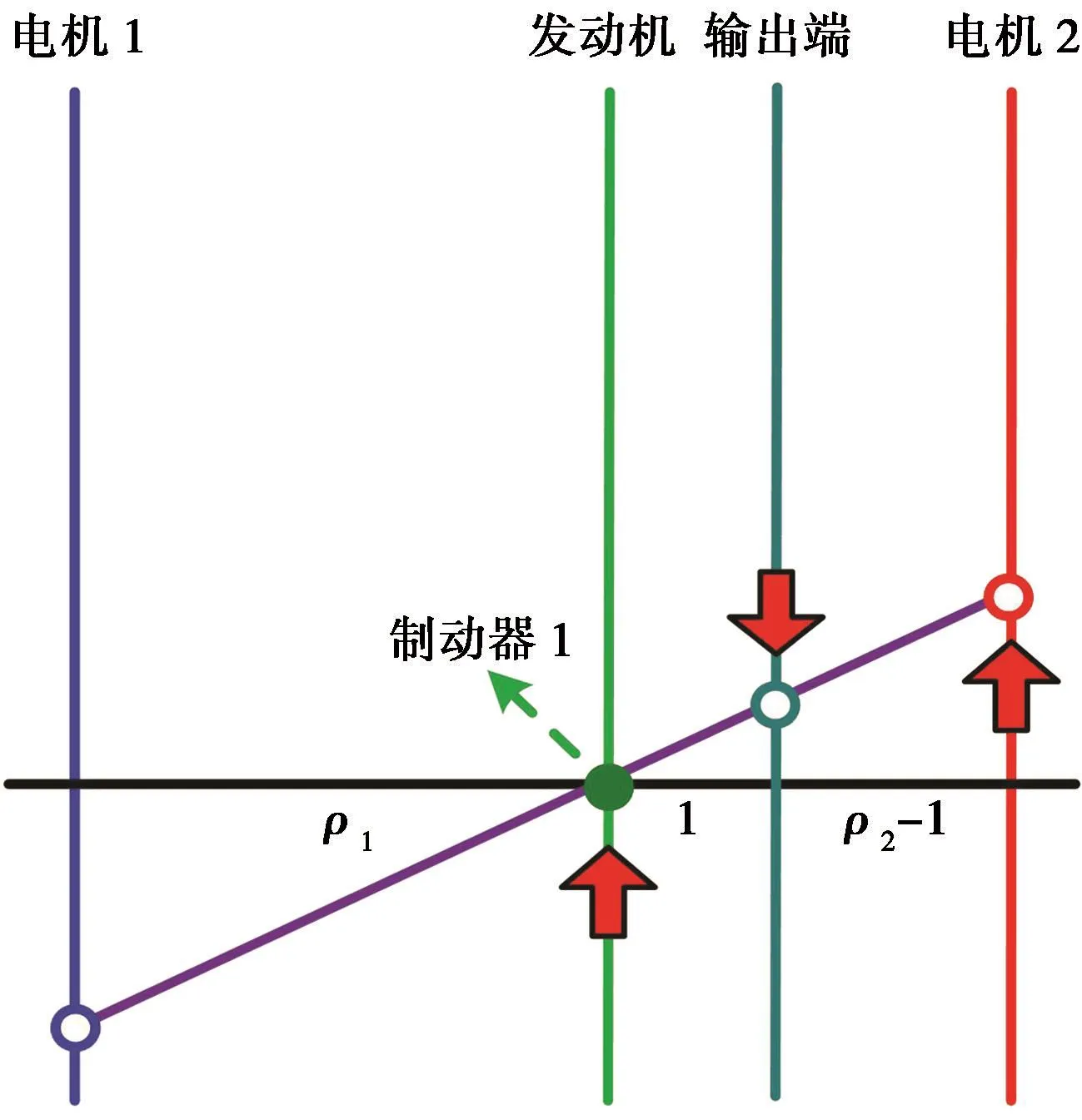
圖3 電機(jī)2純電動模式杠桿圖
2 防抖策略設(shè)計(jì)
2.1 模型簡化與分析
如圖3所示,制動器1鎖止時(shí)提供鎖止轉(zhuǎn)矩,發(fā)動機(jī)和扭轉(zhuǎn)減振器對傳動系的作用忽略不計(jì)。該模式下,系統(tǒng)簡化為一僅包含單級主減速器的雙質(zhì)量模型,如圖4所示。其動力學(xué)關(guān)系為
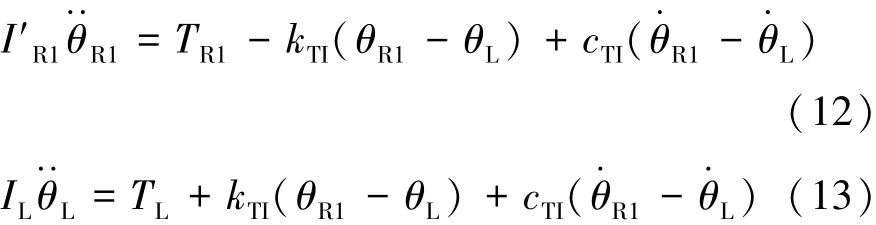
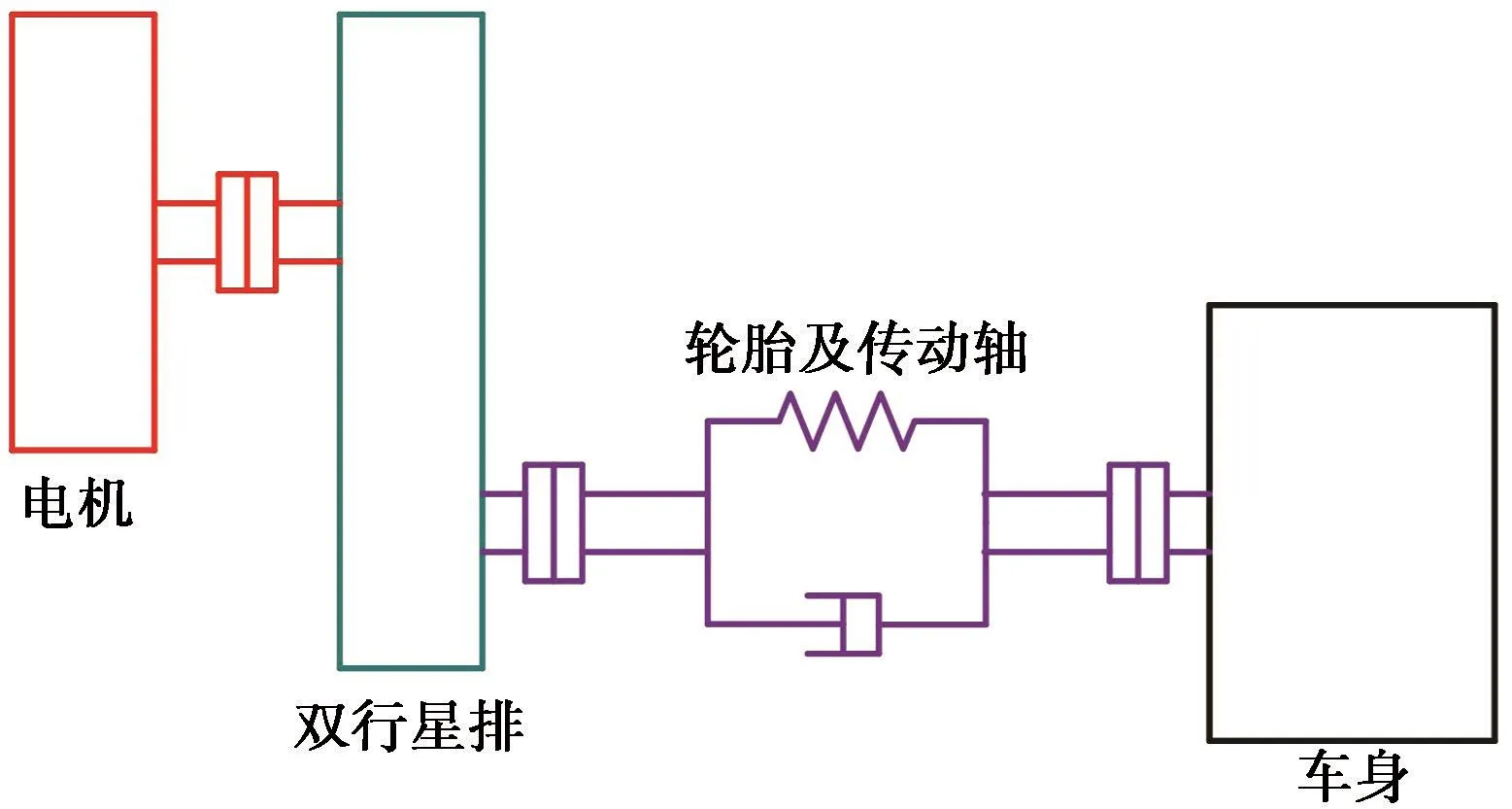
圖4 系統(tǒng)簡化模型

式中I′R1為齒圈輸出端的等效轉(zhuǎn)動慣量。
選取狀態(tài)變量、控制變量和擾動分別為
得簡化后系統(tǒng)的狀態(tài)方程為
由式(15)得系統(tǒng)傳遞函數(shù)矩陣,其中齒圈轉(zhuǎn)矩轉(zhuǎn)速和齒圈轉(zhuǎn)矩 輪速的傳遞函數(shù)表達(dá)式分別為
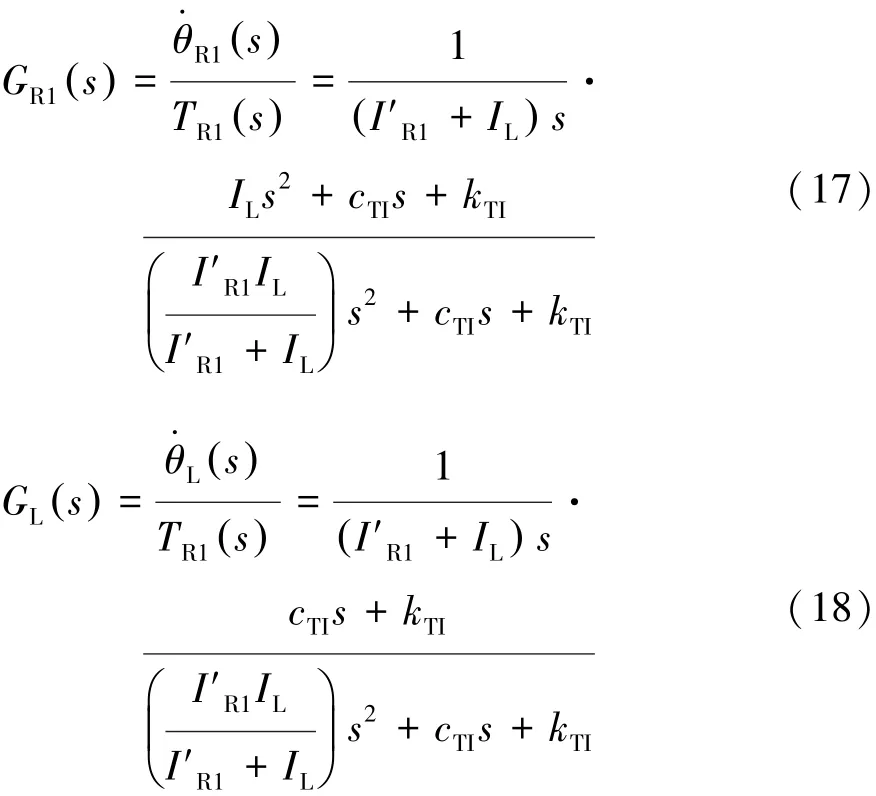
其中,式(17)的零極點(diǎn)分布如圖5所示,式(17)和式(18)的對數(shù)幅、相頻特性如圖6所示。
由圖5和圖6可知:在齒圈轉(zhuǎn)矩作用下,齒圈轉(zhuǎn)速和輪速在2.74Hz頻率范圍附近產(chǎn)生低頻共振,其中齒圈轉(zhuǎn)速和輪速的對數(shù)幅頻響應(yīng)分別為-2.774和-26.01dB。該固有特性由接近虛軸但又不十分接近零點(diǎn)的一對共軛復(fù)極點(diǎn)-0.782+17.3i和-0.782-17.3i確定,其僅與齒圈等效轉(zhuǎn)動慣量、整車等效轉(zhuǎn)動慣量、傳動軸和輪胎的等效剛度和等效阻尼有關(guān)。
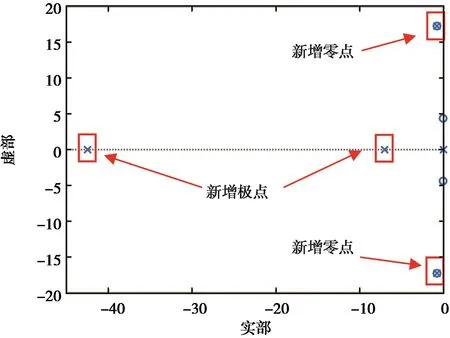
圖5 齒圈轉(zhuǎn)矩 轉(zhuǎn)速零極點(diǎn)分布
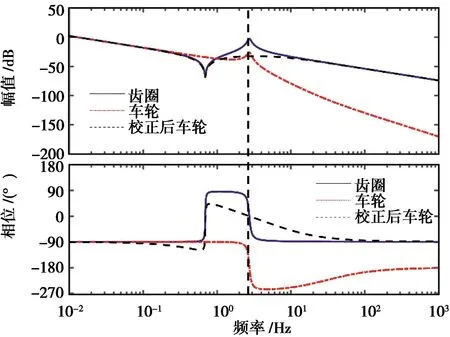
圖6 齒圈轉(zhuǎn)速、輪速幅頻和相頻特性
2.2 前饋校正防抖策略
2.2.1 控制策略設(shè)計(jì)
前饋校正防抖控制策略邏輯架構(gòu)如圖7所示。
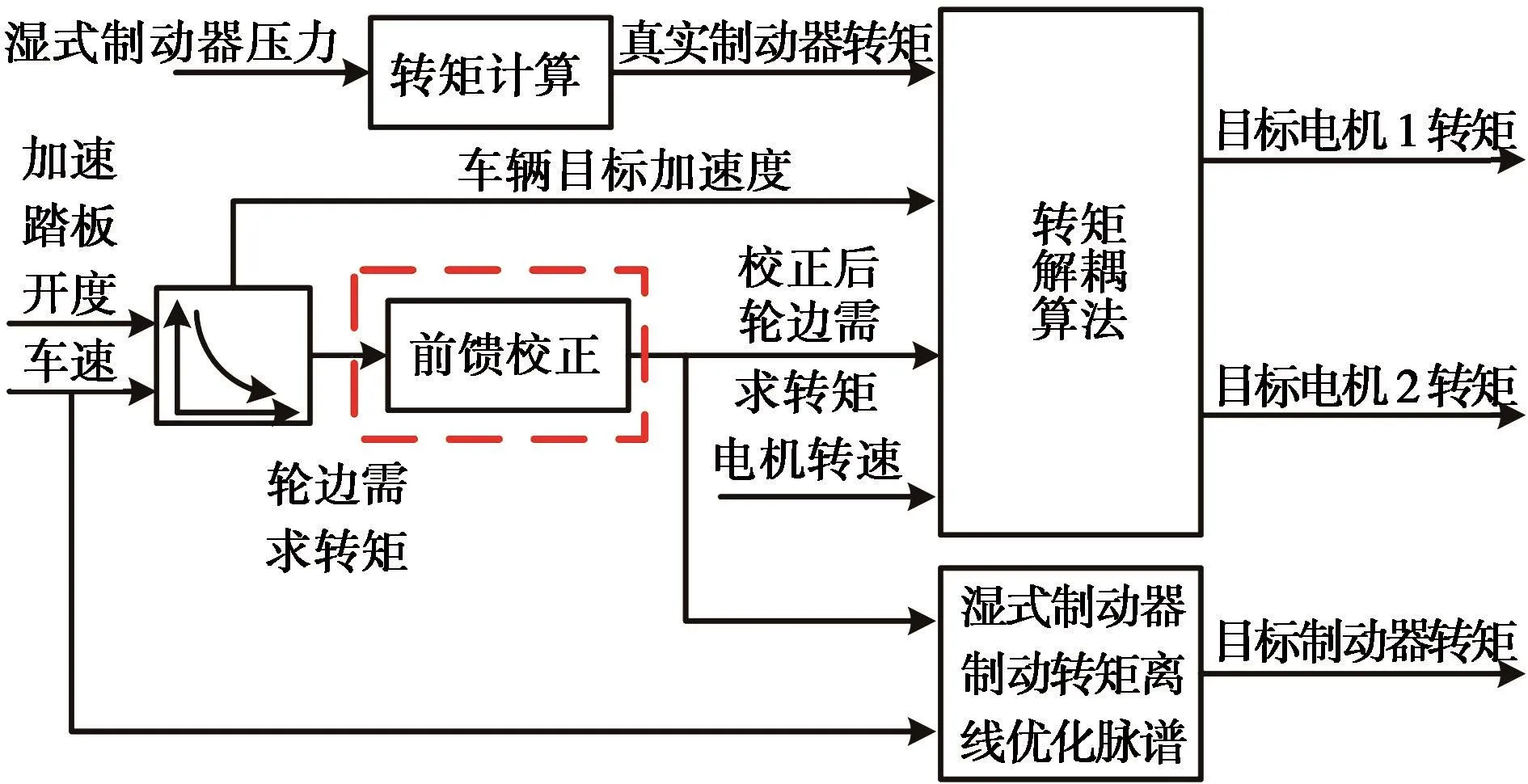
圖7 前饋防抖控制策略邏輯架構(gòu)
由圖7可知:整車控制器根據(jù)加速踏板開度和車速查表獲取輪邊需求轉(zhuǎn)矩和目標(biāo)車輛加速度。其中前饋校正器對輪邊需求轉(zhuǎn)矩進(jìn)行校正,校正后的輪邊需求轉(zhuǎn)矩和車速用于查表獲取濕式制動器最優(yōu)需求轉(zhuǎn)矩,其中濕式制動器最優(yōu)轉(zhuǎn)矩脈譜[15]根據(jù)系統(tǒng)效率最優(yōu)原則,采用瞬時(shí)優(yōu)化方法在線計(jì)算得到。最后,整車控制器根據(jù)電機(jī)反饋轉(zhuǎn)速、由制動器反饋壓力計(jì)算而得的真實(shí)制動器轉(zhuǎn)矩、校正后輪邊需求轉(zhuǎn)矩和目標(biāo)車輛加速度,采用轉(zhuǎn)矩解耦方法[17]實(shí)時(shí)計(jì)算電機(jī)目標(biāo)需求轉(zhuǎn)矩。
2.2.2 校正器設(shè)計(jì)
前饋校正器一方面通過引入新零點(diǎn)消除原主導(dǎo)極點(diǎn)對系統(tǒng)動態(tài)性能的不利影響,另一方面保證新增極點(diǎn)對系統(tǒng)動態(tài)特性無不利影響。
設(shè)計(jì)前饋校正器傳遞函數(shù)為

式中:ξa和ωn分別為原系統(tǒng)特征方程阻尼比和自然頻率;ξd為校正器特征方程阻尼比。
該前饋校正器的幅頻和相頻特性如圖8所示,其中幅頻特性滿足如下關(guān)系式:

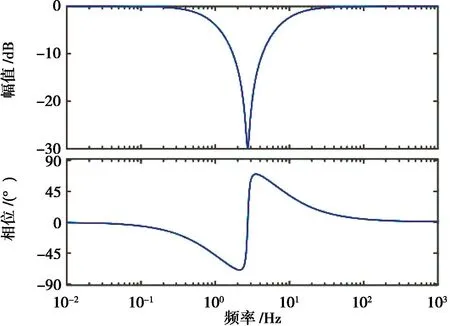
圖8 校正器幅頻及相頻特性
由圖8可知:前饋校正器對指定頻率附近的輸入信號進(jìn)行陷波,陷波幅值由設(shè)計(jì)人員根據(jù)系統(tǒng)性能指標(biāo)給定,進(jìn)而根據(jù)式(20)確定校正器特征方程阻尼比。校正器對指定頻率附近信號的相頻特性產(chǎn)生影響,對低于陷波頻率一定范圍的輸入信號相位響應(yīng)滯后,對高于陷波頻率一定范圍的輸入信號相位響應(yīng)超前,在指定頻率附近的輸入信號相位響應(yīng)發(fā)生急劇變化。
本文中針對原系統(tǒng)的固有振動特性,將前饋校正器陷波幅值定為30dB,添加前饋校正器后的系統(tǒng)零極點(diǎn)分布和對數(shù)幅頻、相頻特性分別如圖5和圖6所示。
由圖5可知,校正器相當(dāng)于在原系統(tǒng)主導(dǎo)極點(diǎn)處引入一對新共軛復(fù)數(shù)零點(diǎn),消除由原主導(dǎo)極點(diǎn)表征的系統(tǒng)低頻共振特性的影響。同時(shí),引入一對遠(yuǎn)離虛軸和原主導(dǎo)極點(diǎn)的實(shí)數(shù)極點(diǎn),減輕前饋校正器自身對系統(tǒng)動態(tài)特性的影響。
由圖6可知,校正后系統(tǒng)僅改變共振頻率附近輸入信號的幅頻響應(yīng),對低于共振頻率一定范圍的輸入信號的相位響應(yīng)略有滯后,對高于共振頻率一定范圍的輸入信號相位響應(yīng)略有超前,遠(yuǎn)離共振頻率處信號的幅頻、相頻特性與校正前保持一致。
2.3 主動阻尼防抖策略
2.3.1 控制策略設(shè)計(jì)
由圖6可知,共振頻率處,輪速的幅頻響應(yīng)約為齒圈轉(zhuǎn)速幅頻響應(yīng)的1/10,即齒圈轉(zhuǎn)矩對輪速動態(tài)特性的影響十分有限。考慮到純電動模式下,輪速與齒圈轉(zhuǎn)速具有固定速比關(guān)系,所以,將輪速經(jīng)速比變換后作為齒圈轉(zhuǎn)速的參考軌跡進(jìn)行偏差控制,以實(shí)現(xiàn)傳動系主動阻尼調(diào)節(jié)。其策略架構(gòu)如圖9所示。
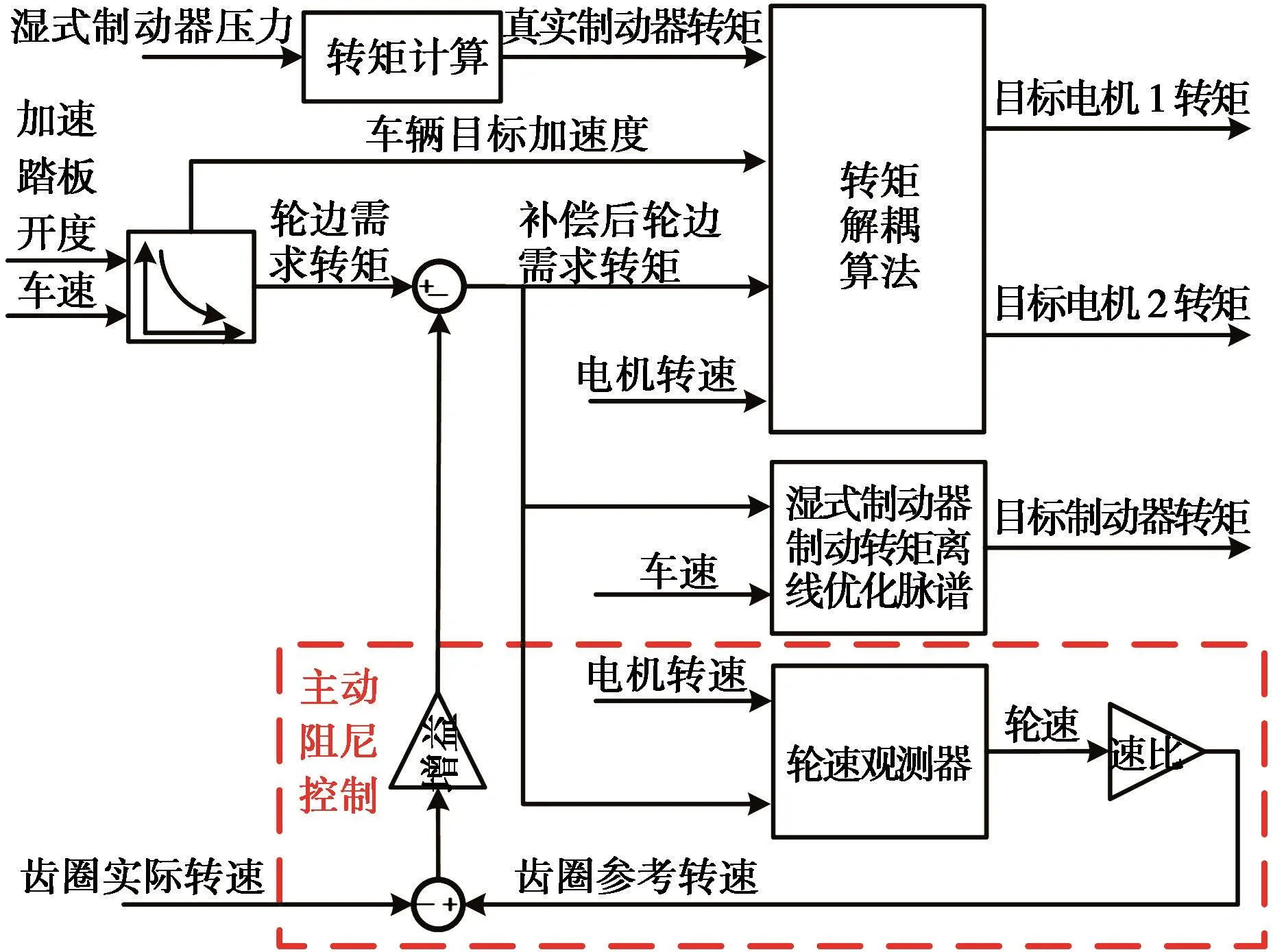
圖9 主動阻尼控制策略邏輯架構(gòu)
由圖7和圖9可知,主動阻尼與前饋校正防抖策略的區(qū)別在于:根據(jù)齒圈實(shí)際轉(zhuǎn)速和參考轉(zhuǎn)速的偏差產(chǎn)生輪邊補(bǔ)償轉(zhuǎn)矩,其中齒圈參考轉(zhuǎn)速由觀測輪速經(jīng)速比變換而來。
2.3.2 觀測器設(shè)計(jì)
齒圈實(shí)際轉(zhuǎn)速可以根據(jù)電機(jī)反饋轉(zhuǎn)速直接獲取,而輪速和角度差則通過設(shè)計(jì)的觀測器獲取。將式(15)中整車負(fù)載轉(zhuǎn)矩視為一種擾動,其與整車質(zhì)量、坡度等因素有關(guān),相對于齒圈轉(zhuǎn)矩而言,該擾動不能突變。所以,將負(fù)載轉(zhuǎn)矩作為狀態(tài)變量并重寫狀態(tài)方程如下:
簡化后系統(tǒng)的狀態(tài)方程為
由式(21)和式(22)系數(shù)矩陣可知,系統(tǒng)可觀測。所以,設(shè)計(jì)狀態(tài)觀測器:

式中:Lp為觀測器反饋增益;C′為觀測器輸出矩陣,C′=I;′為觀測器狀態(tài)變量;′為觀測器輸出變量。
2.3.3 極點(diǎn)配置
鑒于高階系統(tǒng)的動態(tài)響應(yīng)不僅與極點(diǎn)位置有關(guān),還與零點(diǎn)位置有關(guān)。本文中分別以觀測齒圈轉(zhuǎn)速和輪速為例,描述觀測器的極點(diǎn)配置方法。
假設(shè)輪速可測并對齒圈轉(zhuǎn)速進(jìn)行觀測,則將式(22)原系統(tǒng)輸出方程中的輸出矩陣C替換為[0 1 0 0]。如圖10所示,引入閉環(huán)反饋后,觀測器極點(diǎn)由3個(gè)增加為4個(gè),零點(diǎn)由2個(gè)增加為3個(gè)。為簡化系統(tǒng)設(shè)計(jì)并加快觀測器收斂速度,首先,根據(jù)典型2階系統(tǒng)瞬態(tài)性能指標(biāo)確定觀測器的阻尼系數(shù)和自然頻率,由此確定觀測器的兩個(gè)極點(diǎn)位置。然后,將觀測器的另兩個(gè)極點(diǎn)位置配置在實(shí)軸上,并且距虛軸的距離5倍于前兩個(gè)極點(diǎn)距虛軸的距離,使前兩個(gè)極點(diǎn)成為主導(dǎo)極點(diǎn)。
圖10 齒圈轉(zhuǎn)速觀測器極點(diǎn)配置
由圖10可知,兩個(gè)復(fù)數(shù)共軛零點(diǎn)距虛軸的距離遠(yuǎn)大于兩個(gè)主導(dǎo)極點(diǎn)距虛軸的距離,其對系統(tǒng)動態(tài)特性的影響可以忽略。系統(tǒng)簡化為僅包含一個(gè)閉環(huán)零點(diǎn)和兩個(gè)閉環(huán)共軛極點(diǎn)的2階系統(tǒng),其標(biāo)準(zhǔn)形式下的階躍響應(yīng)為
由于0<ζ<1,式(25)取拉氏反變化后得系統(tǒng)在時(shí)域坐標(biāo)下的階躍響應(yīng)為
由于觀測器閉環(huán)零點(diǎn)處于原點(diǎn)(即z=0),則時(shí)域響應(yīng)中由零點(diǎn)引起的分量y2(t)為零,系統(tǒng)的動態(tài)特性完全由閉環(huán)極點(diǎn)決定。當(dāng)觀測器采用不同的阻尼比和角頻率時(shí),齒圈轉(zhuǎn)速的觀測結(jié)果如圖11所示。
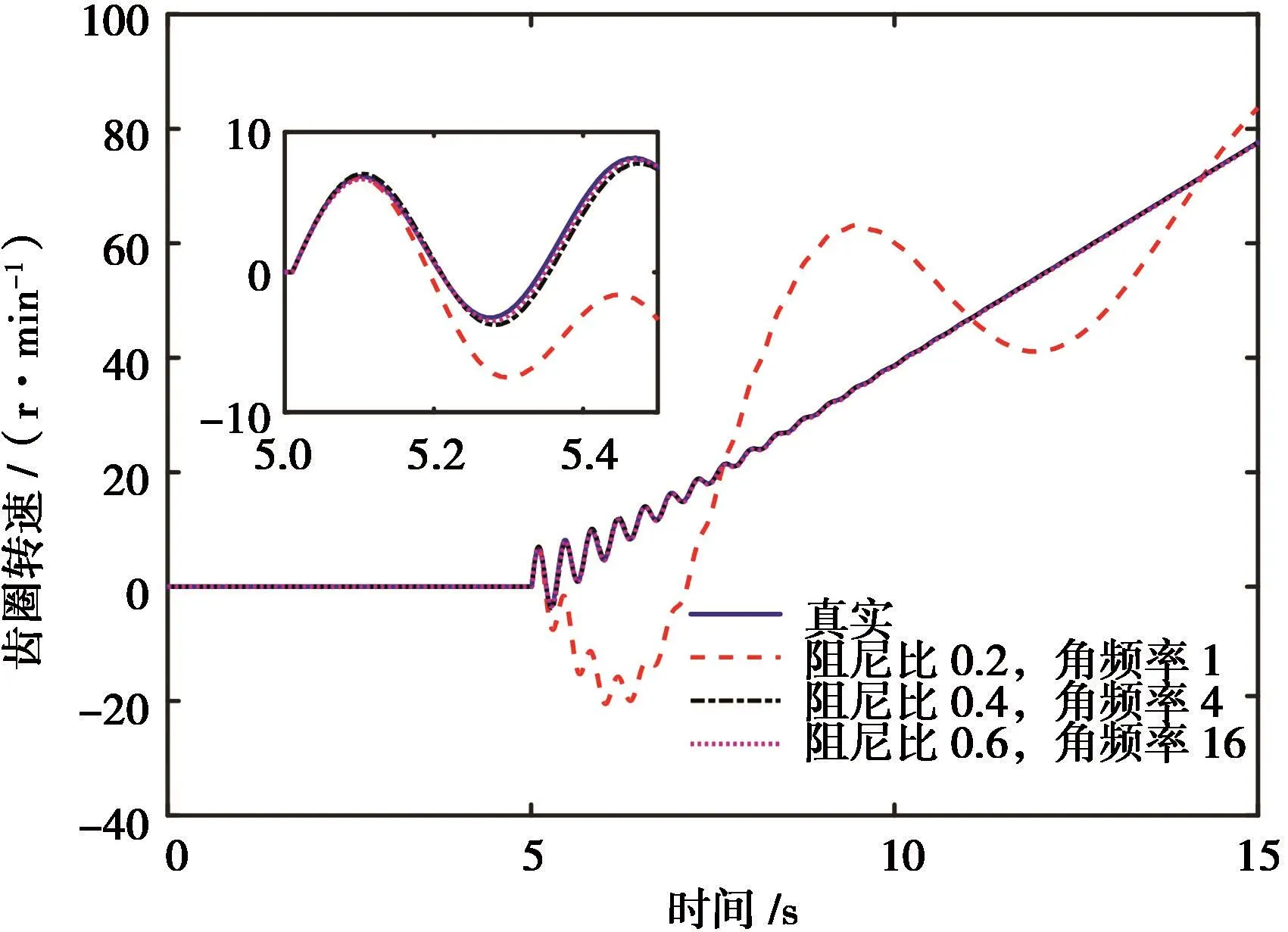
圖11 齒圈轉(zhuǎn)速觀測結(jié)果
由圖11可知:觀測器的收斂速度與目標(biāo)極點(diǎn)的位置有關(guān)(即與簡化后的2階閉環(huán)系統(tǒng)的阻尼比和角頻率有關(guān))。阻尼比越大,超調(diào)量越小;角頻率越大,調(diào)整時(shí)間越短。所以,首先根據(jù)超調(diào)量指標(biāo)確定觀測器阻尼比。然后,固定阻尼比并增加角頻率,使觀測器維持較小超調(diào)量的同時(shí)縮短調(diào)整時(shí)間。
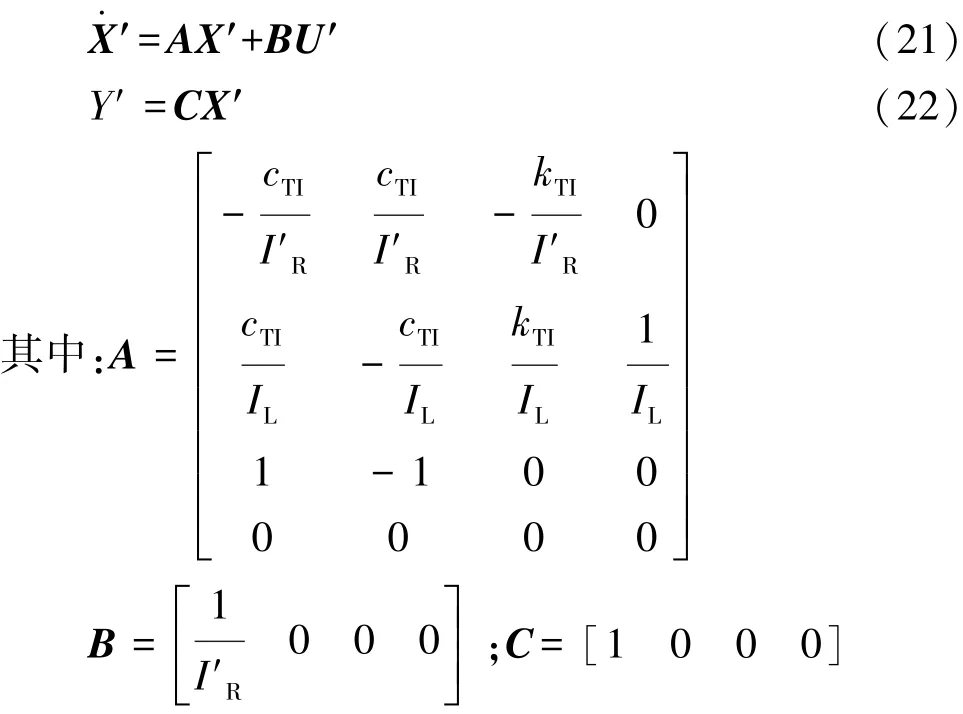
假設(shè)齒圈轉(zhuǎn)速可測并對輪速進(jìn)行觀測,則維持系統(tǒng)輸出矩陣C不變。如圖12所示,引入閉環(huán)反饋后,觀測器極點(diǎn)由2個(gè)增加為4個(gè),零點(diǎn)由1個(gè)增加為3個(gè)。由式(26)可知,位于原點(diǎn)處的閉環(huán)零點(diǎn)對系統(tǒng)動態(tài)響應(yīng)無影響,而另外一對共軛復(fù)數(shù)零點(diǎn)接近虛軸并遠(yuǎn)離原點(diǎn),其使根軌跡向左移動或彎曲,有助于提升系統(tǒng)穩(wěn)定性,縮短瞬態(tài)過程時(shí)間。現(xiàn)將兩組極點(diǎn)距虛軸的距離配置相差5倍以上,則系統(tǒng)簡化為一包含2極點(diǎn)、2零點(diǎn)的2階系統(tǒng),系統(tǒng)動態(tài)性能取決于零點(diǎn)和極點(diǎn)的距離。配置不同極點(diǎn)位置的輪速觀測結(jié)果如圖13所示。
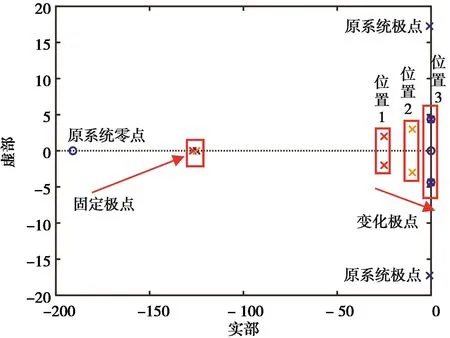
圖12 輪速觀測器極點(diǎn)配置
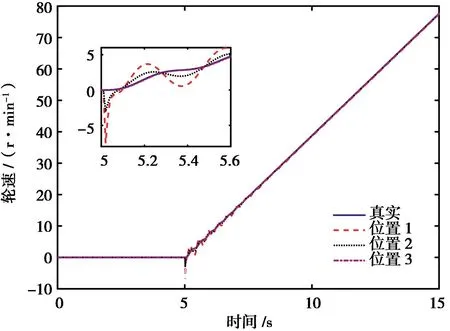
圖13 輪速觀測結(jié)果
由圖12和圖13可知,兩個(gè)閉環(huán)復(fù)數(shù)共軛極點(diǎn)越接近兩個(gè)閉環(huán)復(fù)數(shù)共軛零點(diǎn),系統(tǒng)的動態(tài)響應(yīng)越好。當(dāng)其完全重合(形成一對偶極子)時(shí),系統(tǒng)的動態(tài)響應(yīng)最佳。
3 仿真與結(jié)果分析
采用Matlab/Simulink軟件對圖1所示混合動力系統(tǒng)、圖7和圖9所示防抖策略進(jìn)行建模。其中將校正器方程式(19)、觀測器方程式(23)和式(24)經(jīng)Z變換從連續(xù)時(shí)間域轉(zhuǎn)換至離散時(shí)間域,并將仿真步長設(shè)置為0.002s。以低車速全油門Tip-In/Out工況為例進(jìn)行對比仿真,整車及關(guān)鍵零部件參數(shù)如表1所示,控制前后的齒圈需求轉(zhuǎn)矩、齒圈實(shí)際轉(zhuǎn)速以及整車沖擊度[18]分別如圖14~圖16所示。
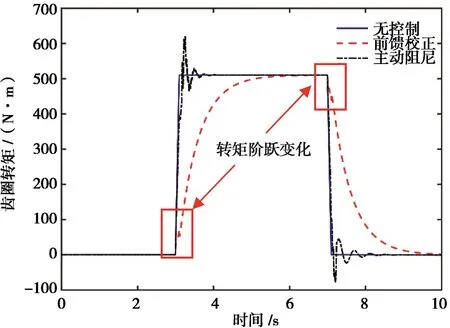
圖14 控制前后齒圈需求轉(zhuǎn)矩
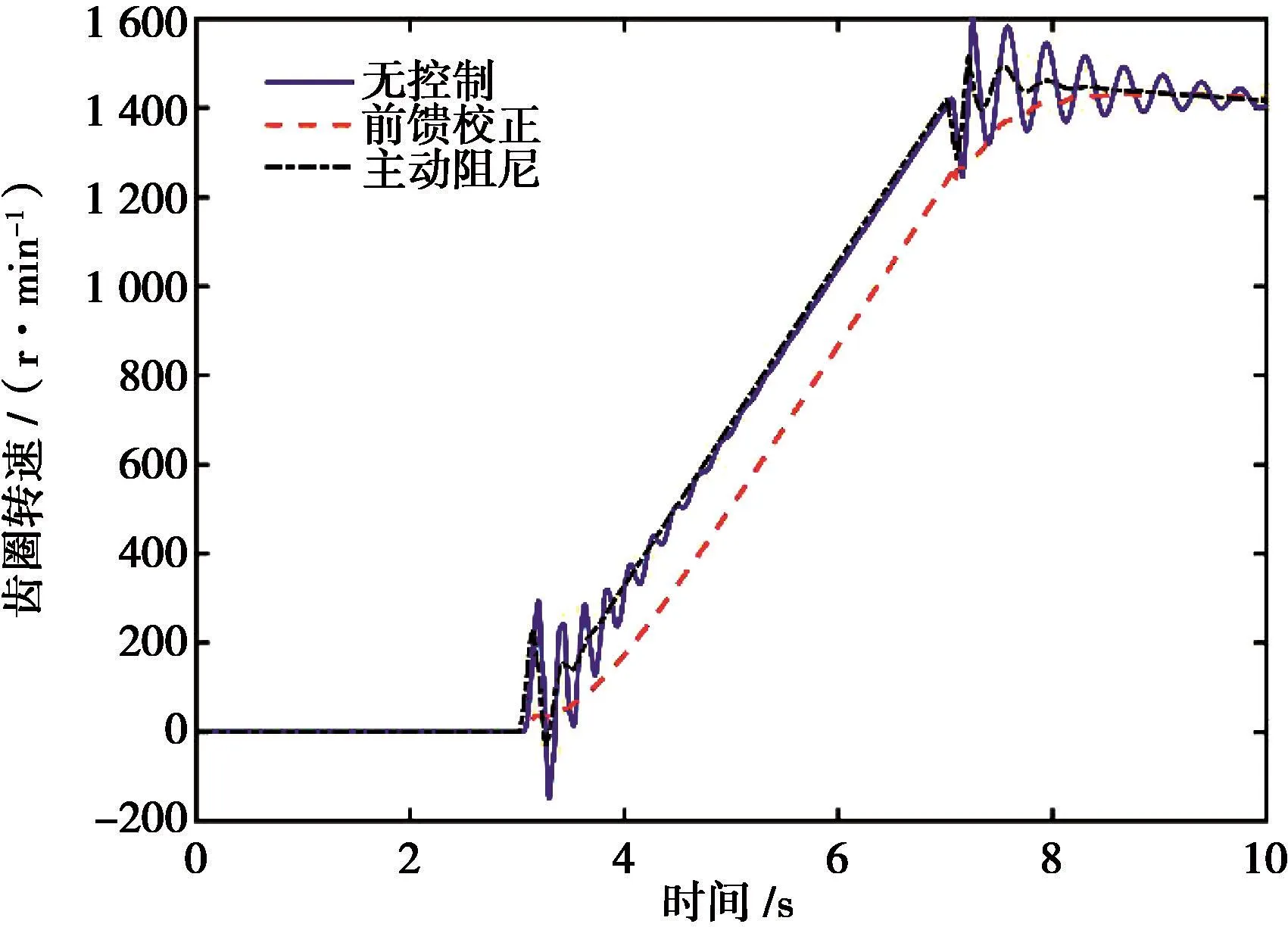
圖15 控制前后齒圈轉(zhuǎn)速
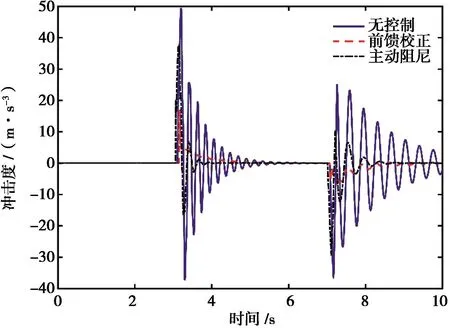
圖16 控制前后整車沖擊度
由圖14可知,防抖控制前,齒圈需求轉(zhuǎn)矩呈方波變化,階躍時(shí)間約為0.1s。主動阻尼控制后,齒圈需求轉(zhuǎn)矩圍繞原始目標(biāo)轉(zhuǎn)矩疊加阻尼轉(zhuǎn)矩,轉(zhuǎn)矩上升階段超調(diào)量為21.6%、調(diào)整時(shí)間為0.41s(取誤差帶寬度5%),轉(zhuǎn)矩下降階段超調(diào)量為15.3%、調(diào)整時(shí)間為0.36s。前饋校正后,齒圈需求轉(zhuǎn)矩上升時(shí)間為1.93s,轉(zhuǎn)矩變化先急后緩,變化梯度總體1階連續(xù),僅在Tip-In階段3~3.11s處和 Tip-Out階段7~7.11s處,轉(zhuǎn)矩有階躍變化。
由圖15可知:防抖控制前,在Tip-In/Out初期齒圈轉(zhuǎn)速有明顯波動并逐漸衰減,Tip-In/Out階段轉(zhuǎn)速波動峰峰值最大分別達(dá)450.2和355r·min-1;主動阻尼控制后,Tip-In/Out階段齒圈轉(zhuǎn)速波動最大峰峰值分別為256.9和232r·min-1,分別比控制前下降43%和34.7%。盡管主動阻尼控制對齒圈初始轉(zhuǎn)速波動抑制效果有限,但轉(zhuǎn)速調(diào)節(jié)時(shí)間相比不施加控制時(shí)明顯縮短。前饋校正后,Tip-In/Out階段齒圈轉(zhuǎn)速均無明顯波動,上升速率與校正前無明顯差異,但轉(zhuǎn)速上升時(shí)間相對校正前延遲0.47s。
由圖16可知,防抖控制前,在Tip-In/Out階段整車沖擊度波動劇烈,但逐漸衰減,整車沖擊度分別在3.2和 7.17s達(dá)到峰值 49.33和-36.76m·s-3。主動阻尼控制后,Tip-In/Out階段整車沖擊度從第2個(gè)振蕩周期開始快速衰減,其分別在3.15和7.11s達(dá)到峰值37.74和-29.48m·s-3,分別降低 23.5%和19.8%。前饋校正后,在Tip-In/Out階段整車沖擊度振蕩明顯減弱,分別在3.17和7.34s達(dá)到峰值17.08和-5.93m·s-3,與無控制相比分別降低65.4%和83.9%。
由上述可知:前饋校正和主動阻尼控制通過校正或補(bǔ)償齒圈轉(zhuǎn)矩,有效抑制Tip-In/Out工況下整車沖擊度和齒圈轉(zhuǎn)速波動,改善整車駕駛平順性。其中,前饋校正策略的振動抑制效果好,但犧牲了整車動力性;而主動阻尼策略的初期抖動抑制效果不佳,但整車動力性表現(xiàn)較好。
4 實(shí)車試驗(yàn)與結(jié)果分析
將圖7前饋校正策略移植至整車控制器并維持控制器執(zhí)行周期為0.01s。為提升輪速觀測精度和阻尼控制效果,將圖9輪速觀測器和主動阻尼控制策略移植至電機(jī)控制器并加快執(zhí)行周期至0.002s。其余部分策略移植至整車控制器,并維持執(zhí)行周期0.01s。整車控制器將驅(qū)動的電機(jī)目標(biāo)轉(zhuǎn)矩發(fā)送給電機(jī)控制器,由電機(jī)控制器在驅(qū)動轉(zhuǎn)矩基礎(chǔ)上疊加主動阻尼轉(zhuǎn)矩。
試驗(yàn)中,齒圈需求轉(zhuǎn)矩和齒圈轉(zhuǎn)速波動通過采集整車控制器內(nèi)部信號獲取,整車沖擊度則通過對安裝在座椅導(dǎo)軌上縱向加速度信號進(jìn)行微分、低通濾波后獲取。試驗(yàn)環(huán)境如圖17所示,試驗(yàn)結(jié)果分別如圖18~圖20所示。

圖17 實(shí)車試驗(yàn)環(huán)境
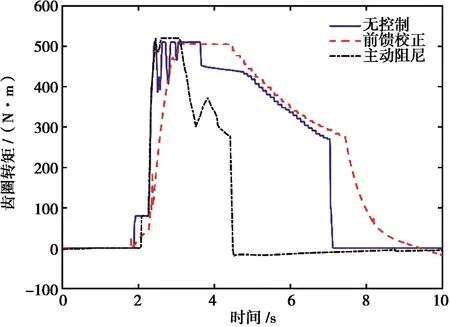
圖18 控制前后齒圈需求轉(zhuǎn)矩
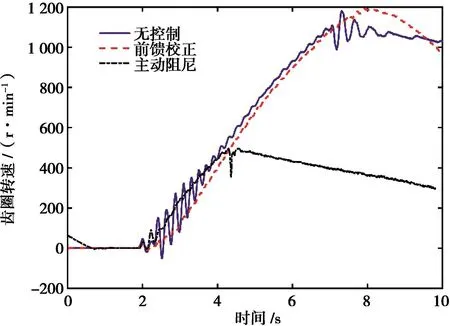
圖19 控制前后齒圈轉(zhuǎn)速
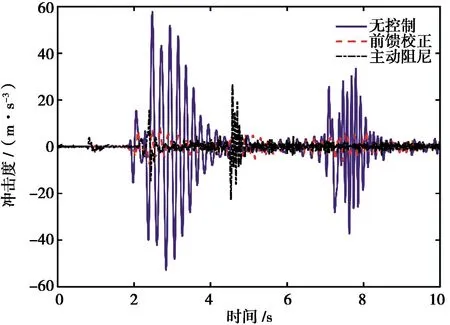
圖20 控制前后整車沖擊度
由圖18可知:防抖控制前,2.26s進(jìn)入Tip-In階段,齒圈需求轉(zhuǎn)矩上升時(shí)間為0.55s,到達(dá)峰值后因電機(jī)能力受限(轉(zhuǎn)速波動引起)轉(zhuǎn)矩出現(xiàn)振蕩,3.07至3.61s轉(zhuǎn)矩維持峰值輸出,隨后因動力電池功率受限逐漸下降,7.04s進(jìn)入Tip-Out階段,齒圈需求轉(zhuǎn)矩下降時(shí)間0.08s且無轉(zhuǎn)矩波動;主動阻尼控制后,齒圈需求轉(zhuǎn)矩僅在Tip-In階段初期疊加補(bǔ)償轉(zhuǎn)矩,隨后平穩(wěn)約0.7s后下降,經(jīng)過一個(gè)較大波動后,在約4.5s時(shí)進(jìn)入Tip-Out階段,轉(zhuǎn)矩急劇下降至零;前饋校正后,Tip-In階段齒圈需求轉(zhuǎn)矩上升時(shí)間為1.27s,在Tip-In階段,轉(zhuǎn)矩有兩處階躍變化至4.38s時(shí),因動力電池功率受限開始逐漸下降,7.44s進(jìn)入Tip-Out階段,齒圈需求轉(zhuǎn)矩先急后緩地下降,其間在8.18s處,轉(zhuǎn)矩有小階躍變化。
由圖19可知:防抖控制前,在Tip-In/Out初期齒圈轉(zhuǎn)速波動明顯并逐漸衰減,Tip-In/Out階段轉(zhuǎn)速波動峰峰值最大分別達(dá) 246.26和 196.3r·min-1;主動阻尼控制后,Tip-In/Out初始階段齒圈轉(zhuǎn)速波動較小,峰峰值分別降至65和148r·min-1,且轉(zhuǎn)速波動后被快速抑制,調(diào)整時(shí)間明顯縮短;前饋校正后,Tip-In/Out階段齒圈轉(zhuǎn)速均無明顯波動,上升速率與校正前無明顯差異,但轉(zhuǎn)速上升時(shí)間相對校正前延遲0.16s。
由圖20可知:防抖控制前,在Tip-In/Out階段初期,整車沖擊度波動明顯,Tip-In/Out階段整車沖擊度分別在 2.48和 7.36s達(dá)到峰值 57.98和-37.65m·s-3,隨后逐漸衰減;主動阻尼控制后,在Tip-In/Out階段初期整車沖擊度波動明顯減小,分別在2.40和4.59s達(dá)到峰值 15.73和26.81m·s-3,然后被快速抑制,抑制后的平均幅值維持在15m·s-3以內(nèi);前饋校正后,在 Tip-In/Out階段整車沖擊度均無明顯波動,幅值維持在10m·s-3以內(nèi)。
綜上所述,前饋校正和主動阻尼防抖策略的試驗(yàn)結(jié)果與仿真結(jié)果基本一致。可見,通過校正或補(bǔ)償齒圈需求轉(zhuǎn)矩,能夠有效抑制Tip-In/Out工況下整車沖擊度和齒圈轉(zhuǎn)速波動,改善整車駕駛平順性。
5 結(jié)論
本文中基于傳動系模型設(shè)計(jì)前饋校正器和輪速觀測器,并對齒圈轉(zhuǎn)矩進(jìn)行校正和補(bǔ)償控制,有效抑制復(fù)合功率分流式混合動力轎車純電動Tip-In/Out工況的整車縱向抖振。主要結(jié)論如下:
(1)前饋校正器能夠?qū)χ付l率范圍內(nèi)的齒圈轉(zhuǎn)速響應(yīng)進(jìn)行陷波,陷波幅值可任意配置,但由于前饋控制屬于開環(huán)控制,其控制效果依賴準(zhǔn)確的系統(tǒng)結(jié)構(gòu)參數(shù);
(2)通過輪速觀測器能夠快速、精確地觀測輪速,當(dāng)輪速觀測器的兩個(gè)閉環(huán)極點(diǎn)與閉環(huán)零點(diǎn)構(gòu)成一對偶極子時(shí),觀測器性能最佳;
(3)利用觀測輪速并實(shí)施齒圈轉(zhuǎn)速閉環(huán)控制,能有效抑制整車縱向沖擊和齒圈轉(zhuǎn)速波動,由于采用閉環(huán)控制,其對傳動系中因擾動或參數(shù)變化引起的轉(zhuǎn)速波動同樣能產(chǎn)生抑制效果。
為提高前饋校正控制的自適應(yīng)性,和主動阻尼控制的魯棒性,下一階段工作將著眼于傳動系扭振頻率的在線識別和觀測器噪音的抑制。
[1] LA C,POGGI M,MURPHY P,et al.NVH considerations for zero emissions vehicle driveline design[C].SAE Paper 2011-04-1545.
[2] SYED F U,KUANG M L,YING H.Active damping wheel-torque control system to reduce driveline oscillations in a power-split hybrid electric vehicle[J].IEEE Transactions on Vehicular Technology,2009,58(9):4769-4785.
[3] 張立軍,鄭鵬,孟德建,等.混合動力轎車純電動模式起步時(shí)縱向抖振的試驗(yàn)研究與控制[J].汽車工程,2013,35(3):212-218.
[4] VALENZUELA M A,BENTLEY J M,LORENZ R D.Evaluation of torsional oscillations in paper machine sections[J].Industry Applications, IEEE Transactions on,2005,41(2):493-501.
[5] VALENZUELA M A,BENTLEY J M,VILLABLANCA A,et al.Dynamic compensation of torsional oscillation in paper machine sections[J].Industry Applications, IEEE Transactions on,2005,41(6):1458-1466.
[6] MAKKAPATI V P,REICHHARTINGER M,HORN M.Performance improvement of servo drives with mechanical elasticity via extended acceleration feedback[C].Control Applications(CCA),2012 IEEE International Conference on,2012:1279-1284.
[7] MUSZYNSKI R,DESKUR J.Damping of torsional vibrations in high-dynamic industrial drives[J].IEEE Transactions on Industrial Electronics,2010,57(2):544-552.
[8] 汪貴平,馬建,楊盼盼,等.電動汽車起步加速過程的動力學(xué)建模與仿真[J].長安大學(xué)學(xué)報(bào)(自然科學(xué)版),2009(6):98-102.
[9] 胡建軍,杜瑞,吉毅.純電動汽車起步控制策略[J].重慶大學(xué)學(xué)報(bào),2013,36(8):19-25.
[10] BANG J S,KO Y-K,JUNG T-H.The active damping control to reduce driveline oscillations for electric vehicles using wheel speeds[C].SAE Paper 2015-01-1113.
[11] KOU Y S,WESLATI F.Development of a hybrid powertrain active damping control system via sliding mode control scheme[C].SAE Paper 2013-01-0486.
[12] AMANN N, BOCKER J, PRENNER F.Active damping of drive train oscillations for an electrically driven vehicle[J].IEEE/ASME Transactions on Mechatronics,2004,9(4):697-700.
[13] YU Haisheng, ZHANG Jianwu, ZHANG Tong.Control strategy design and experimental research on a four-shaft electronic continuously variable transmission hybrid electric vehicle[J].Proceedings of the Institution of Mechanical Engineers,Part D:Journal of Automobile Engineering,2012,226(12):1594-1612.
[14] 趙治國,代顯軍,王晨,等.復(fù)合功率分流混合電動轎車驅(qū)動模式切換的協(xié)調(diào)控制[J].汽車工程,2015,37(3):260-265.
[15] ZHAO Z,WANG C,ZHANG T,et al.Control optimization of a compound power-split hybrid transmission for electric drive[C].SAE Paper 2015-01-1214.
[16] BENFORD H L,LEISING M B.The lever analogy:A new tool in transmission analysis[C].SAE Paper 810102.
[17] 趙治國,王晨,張彤,等.復(fù)合功率分流變速器的設(shè)計(jì)與驗(yàn)證[J].汽車工程,2015,37(4):407-415,390.
[18] 張俊智,李波,薛俊亮,等.混合動力電動汽車沖擊度的試驗(yàn)[J].機(jī)械工程學(xué)報(bào),2008,44(4):87-91.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32