新型打結裝置打結過程的關鍵參數研究*
2018-03-13 08:30:28黃松檀呂俊杰馬亮亮應富強
機電工程 2018年3期
黃松檀,胡 沖,呂俊杰,馬亮亮,應富強
(浙江工業大學 特種裝備制造與先進加工技術教育部重點實驗室,浙江 杭州 310014)
0 引 言
目前包裝袋行業的打結,依舊是人工打死扣的方式,勞動強度大、效率低。現在打結器主要用于農業,如對牧草進行打結捆扎的D型打結器,外科手術最后縫線動作的絲線打結器等,因此對包裝袋手繩的打結裝置進行設計研究具有一定的科研和市場價值。
國內外學者對打結裝置開展了大量研究,包括打結器運動仿真、動作功能及運動時序分析[1-3],結構性能分析[4-5],空間結構參數分析[6-7],改進設計與試驗[8-9],新型打結器設計等[10-12]。如在打結器運動仿真方面,江蘇大學的尹建軍等對D型打結器及其輔助機構進行了運動仿真與時序分析,揭示了D型打結器的成結原理,確定了各構件耦合動作時序關系;中國農業大學的陳龍健等利用逆向工程技術對D型打結器進行了三維重構,并進行了運動仿真研究;在結構性能分析方面,內蒙古大學的劉智強對D型打結器的鉗嘴結構性能進行了分析研究,確定了鉗嘴的應力分布及疲勞壽命;在空間結構參數分析方面,中國農業大學的張安琪分析了割繩脫扣機構的空間結構參數,對打結器割繩脫扣機構進行運動學分析,建立了其參數設計理論模型,描述了與其他機構之間的參數匹配關系;在結構優化、改進設計及試驗方面,中國農業大學的李海濤等對割繩脫扣機構進行了磨損分析與改進設計,提出以凸輪理論廓面的等距圓弧面代替現有柱面輪廓的解決方案,通過磨損試驗對比有明顯改善;在新型打結器設計方面,HE Long, ZHANG Qin和CHARVET H J設計了一種機械化操作的新型繞繩機器人,其原理是以一根格狀線基準軸,通過氣缸與勾子做繞繩動作,最后由鉗子完成成結動作;天津大學自行研制了“妙手”系列的外科手術機器人;哈爾濱工業大學的李哲與王宇銳進行了海帶打結原理的研究以及新一代海帶打結機器人的系統設計。上述研究均未涉及包裝袋手繩打結過程中關鍵參數如繞繩角度及成結移動距離的研究,因此有必要對包裝袋手繩打結過程的關鍵參數進行研究,有助于包裝袋手繩打結實現機械自動化,降低工人勞動強度,提高生產效率。
本研究將針對包裝袋手繩打結設計一種新型打結裝置,并對其打結過程中的關鍵參數進行研究,進而制作樣機進行試驗驗證。
1 新型打結裝置的設計
打結裝置包括繞繩機構、傳動機構及移動成結機構,繞繩機構由主動齒輪、從動齒輪、夾子及夾持板組成,傳動機構由傳動齒輪、主從動斜齒輪及相應的連接軸組成,移動成結機構由勾槽、移動軸及不完全齒輪組成。
打結裝置示意圖如圖1所示。
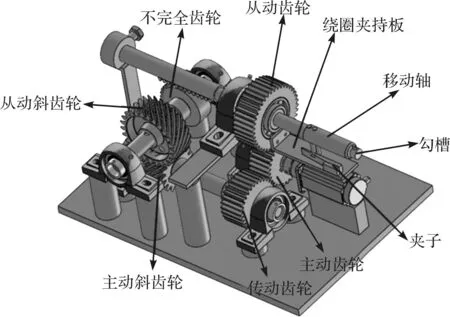
圖1 打結裝置示意圖
繞繩機構繞繩圈動作,主動輪帶動從動輪及固定在從動輪上的繞圈夾持板轉動,夾持板上的夾子就能夾住手繩進行繞圈動作。
繞繩圈如圖2所示。
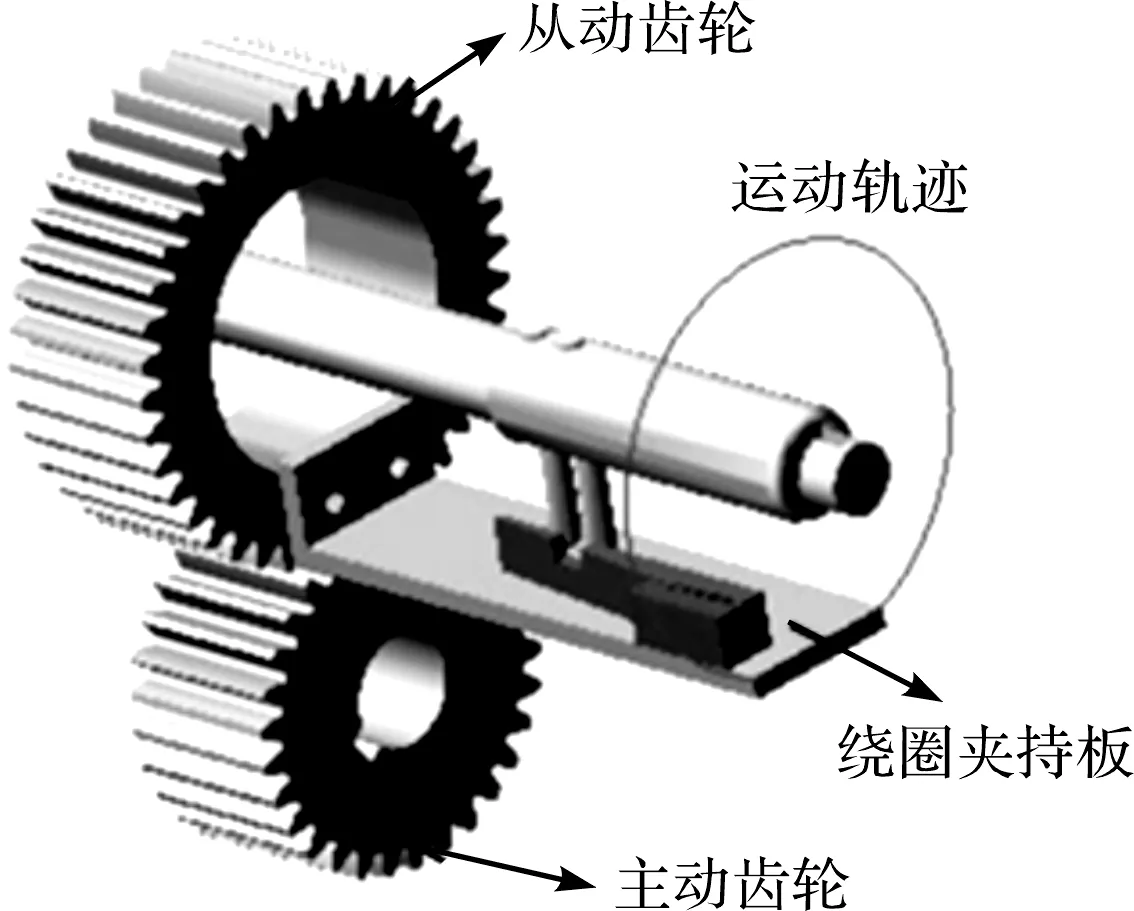
圖2 繞繩圈
成結機構由電機輸入驅動到主動齒輪,其再通過傳動齒輪將動力傳遞到與之同軸的交錯斜齒輪機構,進而帶動不完全齒輪機構工作,移動軸實現勻速直線運動。
機構及軌跡如圖3所示。
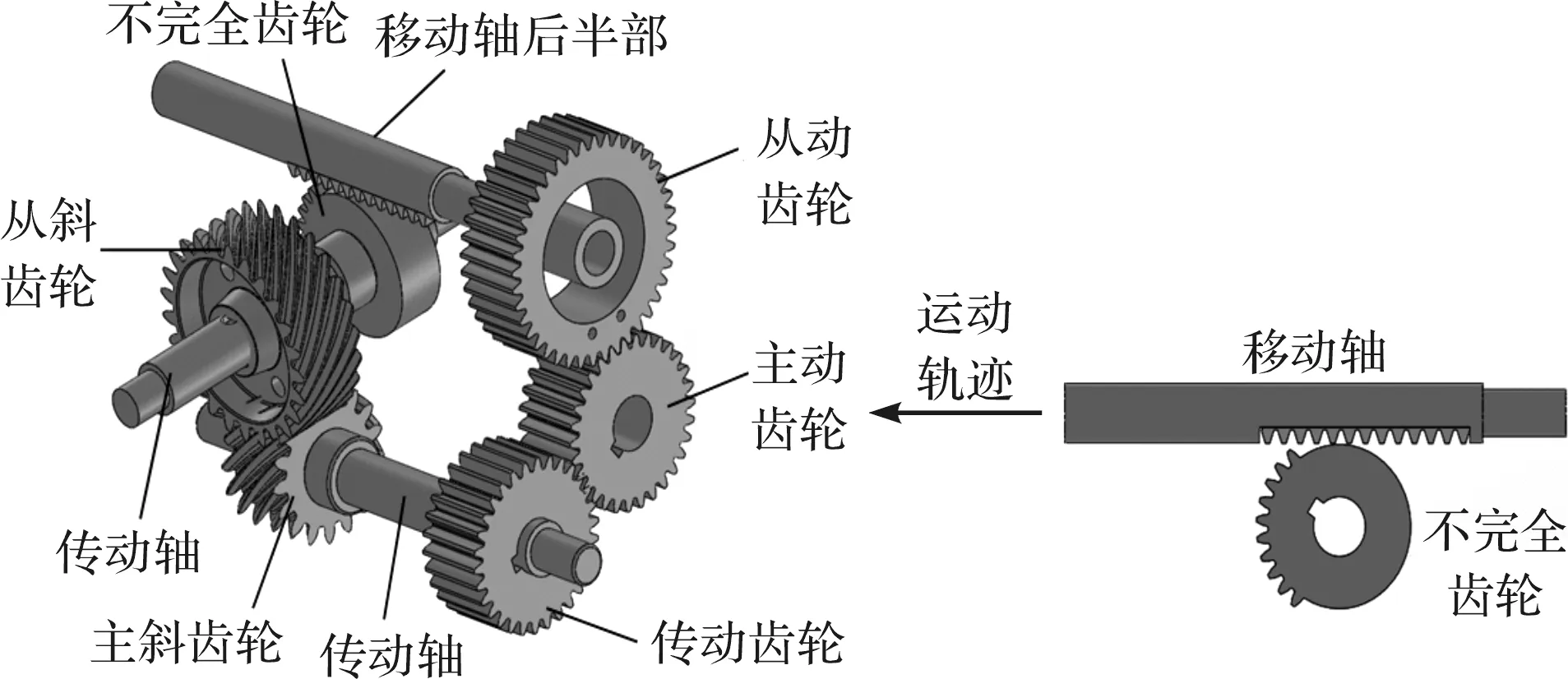
圖3 成結機構及移動軸運動軌跡
2 打結過程關鍵參數計算
打結裝置機構簡圖如圖4所示。
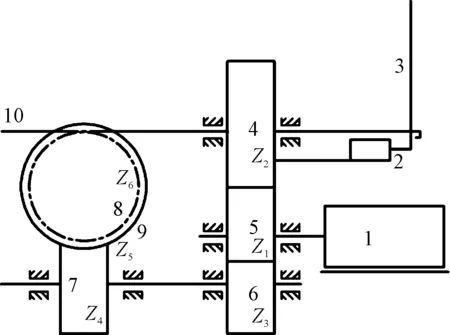
圖4 打結裝置機構簡圖1—電機;2—夾子;3—手繩;4—從動齒輪;5—主動齒輪;6—傳動齒輪;7—主動斜齒輪;8—不完全齒輪;9—從動斜齒輪;10—移動軸
本研究根據機械設計知識,以繩子開始繞圈到繞到凹槽總用時為橋梁,計算得到傳動比、繞繩圈數及移動距離之間的關系,進一步確定3者的范圍。設繩子開始繞圈到繞到凹槽總用時為t,其由繩子繞到凹槽時移動軸移動時間和從動齒輪旋轉出繩圈所用時間組成,設為t1和t2,總的繞繩圈數為k,繩子繞到凹槽時移動軸移動距離為s。
從移動軸移動開始分析,不完全齒輪的轉速、移動軸移動速度、移動軸移動距離及從動齒輪周長公式如下所示:
(1)
式中:n—電機轉速;i—傳動比;w6—不完全齒輪角速度;d6—不完全齒輪分度圓直徑;z2—從動齒輪齒數;m2—模數。
由式(1)可得:
(2)
(3)
從動齒輪總的旋轉圓周長為:
C′=C·k=πm2z2k
(4)
所以從動齒輪帶著夾持機構中的繩子繞到凹槽時間:
(5)
總時間為:
t=t1+t2
(6)
聯立式(2,3,5,6),得傳動比、繞繩圈數及移動距離關系式:
i12d6.(k-1)·π=2s
(7)
式中:k-從動齒輪帶動夾持機構中的繩子繞到凹槽的繞圈數,其值應小于從動齒輪的總繞圈周數為1.3圈~1.6圈,故可以設定k∈[1,1.2]。
根據實際手工模擬打結動作可知,當繩子繞到凹槽時移動軸移動的距離一般在s∈[10,30]。
至此,可以確定變量的范圍如表1所示。
表1 各變量范圍
3 打結過程仿真分析
3.1 前處理
本研究利用Adams軟件對打結過程進行仿真分析,確定轉動角度和移動距離的值,并為樣機制作及試驗提供一定的指導。首先筆者將建立好的模型進行簡化,再將三維模型轉換成Parasolid格式導入到Adams中,根據實際運動情況創建各相鄰構件之間的運動副。
繞繩機構帶動手繩繞繩圈和移動軸帶動手繩成結是打結過程中的關鍵環節,所以仿真時夾子鎖定在安裝板上,安裝板鎖定在從動齒輪上,對從動齒輪添加旋轉驅動,移動軸與地面通過移動副相連并對其添加位移驅動,手繩用同規格的圓柱體通過軸套力bushing相連,軸套力的添加通過宏程序實現[13-14]。
命令如下:
…………..
variable create variable_name=ip integer_value=1
while condition=(ip<300)
marker create &
marker_name=(eval(".model_1.part_"http://ip//".MARKER_327"http://ip+1000))&location=-77.4192478322,149.7071613161,(eval((ip-420)*1)) &
……………
3.2 結果分析
本研究經過上述驅動及約束設置和宏程序添加后,利用Adams求解器對打結裝置虛擬樣機模型進行仿真。
其仿真結果如圖5所示。
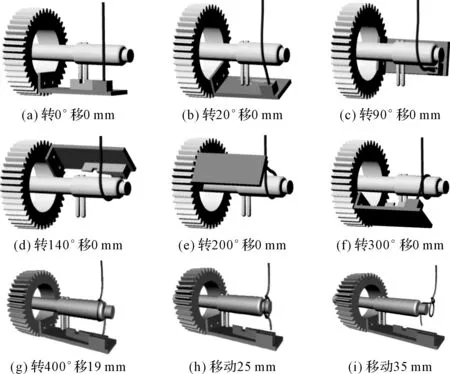
圖5 打結裝置打結仿真過程圖
同時得到轉動角度與時間的關系曲線和移動距離與時間的關系曲線。
其中角度與時間關系如圖6所示。
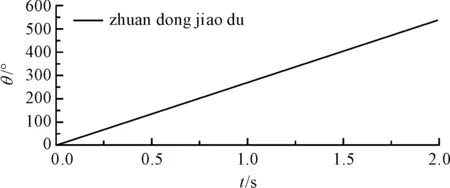
圖6 轉動角度與時間的關系
從圖6可知:由于電機提供穩定不變的動力,則從動齒輪的角速度即繞繩機構的角速度也為勻速,所以繞繩機構在整個過程中的轉動角度是勻速增加的。
距離與時間關系如圖7所示。
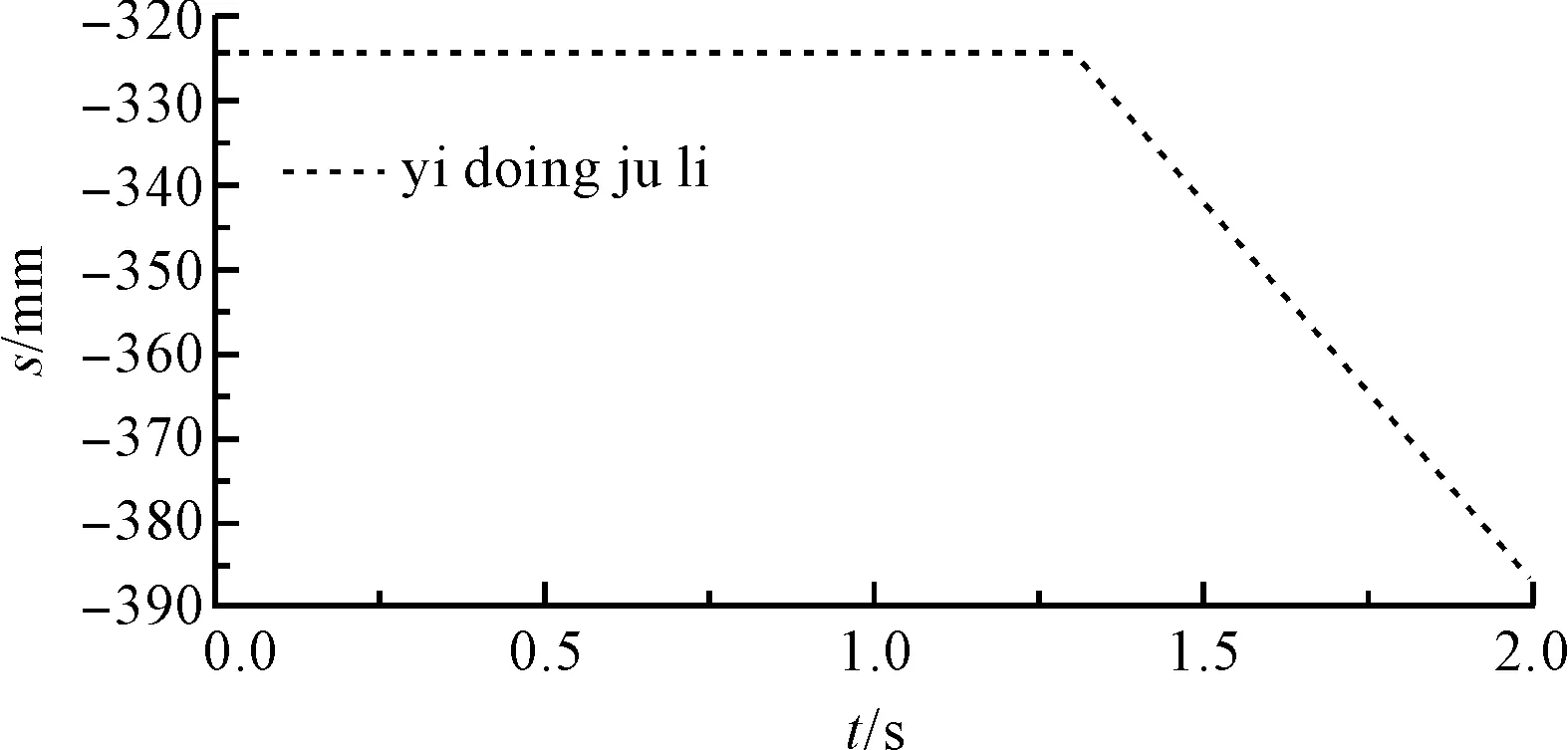
圖7 移動距離與時間關系
由圖7可知:成結機構在t=1.3 s之前沒有移動量,處于靜止狀態,而這個時間區間剛好是繞繩機構繞出繩圈的階段。過了這個時間點繩圈被繞出,成結機構也從此時開始移動,由于整個系統只有一個動力源而且是勻速的,移動軸移動過程也是勻速進行的,而且這個過程中繞繩機構保持旋轉。t=2 s時,整個打結裝置停止工作,移動軸停止運動,完成打結,總移動量為60 mm左右,這符合實際所需的成結要求。
本研究對轉動角度-時間關系曲線和移動距離-時間關系曲線進行擬合,得到的三者關系如圖8所示。

圖8 移動距離—時間—轉動角度關系
由圖8可知:P點坐標(343,1.51,400),其含義是繩體繞入到勾槽,移動軸移動19 mm、時間1.51 s和轉動角度400°左右,也就是說停止繞繩圈,移動軸夾住繩端穿過繩圈進行最后成結動作。得出結果,繞繩400°,移動軸移動,繩體進入勾槽中。
對圖8得到的P點進一步分析,將i12=4/3,d6=60 mm代入前面移動距離的參數關系式(7),可得:
s=40π(k-1)
(8)
其中:s∈[10,30],k∈[1,1.2]。
本研究利用Matlab繪制移動距離s與繞繩圈數k的關系圖,如圖9所示。
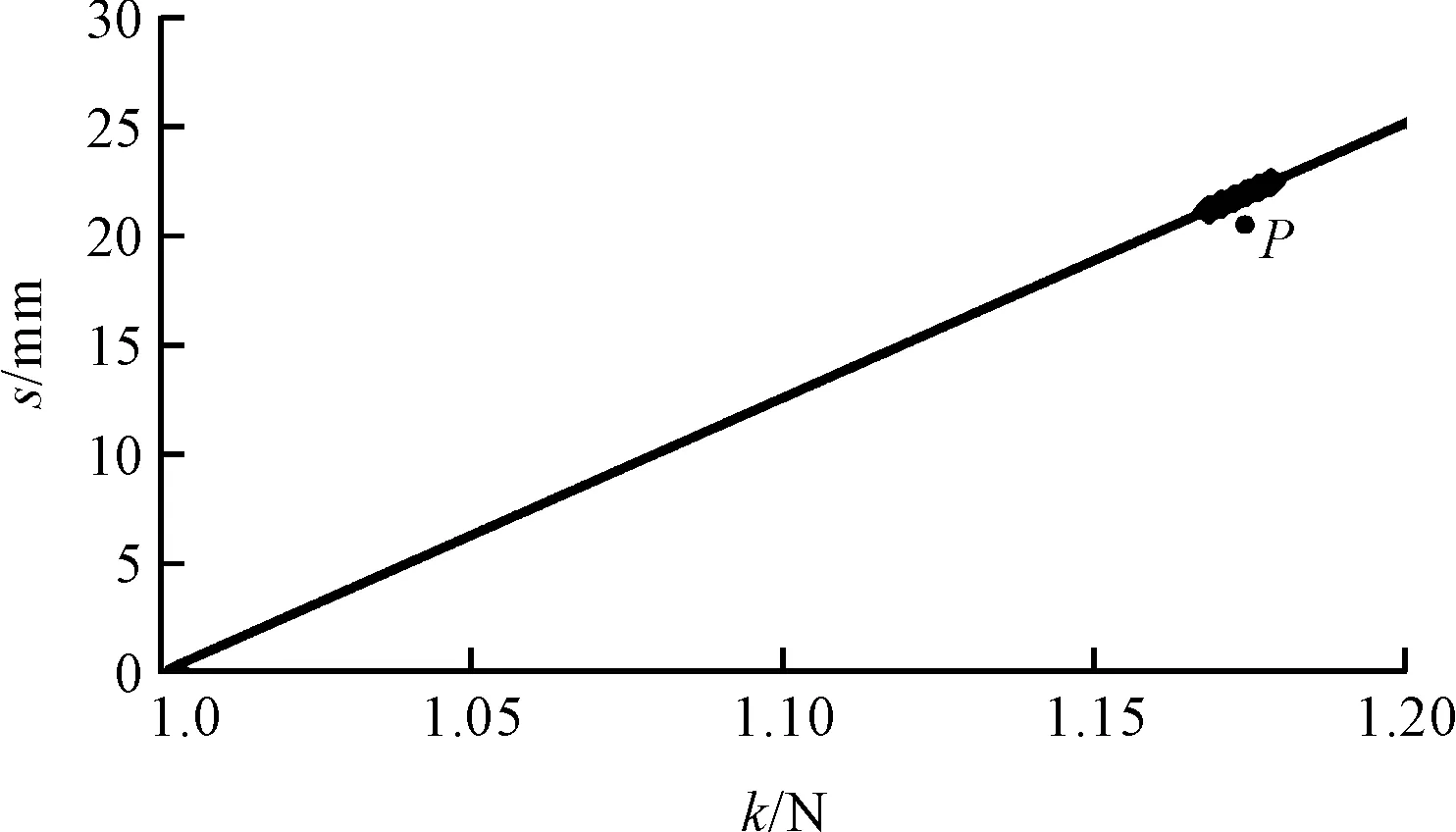
圖9 繞繩圈數與移動距離關系圖
由圖9可知:Adams仿真得到的P點在Matlab繪制的關系斜線附近,可看出相差不多,故仿真得到轉動角度及成結移動距離在前面理論計算得到的范圍內,符合設計要求。
4 樣機制作及試驗驗證
本研究通過上述理論計算、仿真分析及相關機械設計知識,確定繞繩機構轉動角度和成結機構移動距離的值,根據Solidworks里建立的打結裝置三維模型,進行實物樣機的制作,并試驗驗證。
打結裝置樣機如圖10所示。

圖10 打結裝置樣機
試驗打結過程如圖11所示。
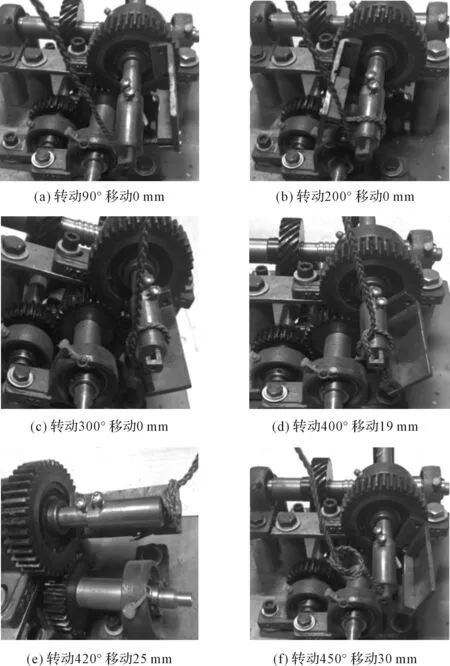
圖11 打結試驗過程
本研究通過試驗測量得出轉動角度在395°~405°之間,移動距離在336 mm~345 mm之間,與上述理論計算和仿真結果基本相符。
5 結束語
根據手工打結過程和機械設計經驗,本研究通過對打結過程進行理論計算,得到了轉動角度和移動距離的取值范圍;為了得到關鍵參數的確定值,本研究借助仿真軟件Adams對打結過程進行了仿真分析,得到了關鍵參數轉動角度400°,移動距離19 mm,時間1.51,并用Matlab繪制繞繩圈數與移動距離關系曲線進行了驗證,最終確定了轉動角度和移動距離的值,并制作樣機進行試驗驗證。
研究結果表明:試驗測量的結果與理論計算得到的范圍及仿真結果基本相符,可對提高包裝袋手繩打結成功率及今后打結裝置的改進提供一定的參考。
[1] 尹建軍,李 雙,李耀明.D型打結器及其輔助機構運動仿真與時序分析[J].農業機械學報,2011,42(6):103-107.
[2] 黃 偉,張志毅,劉志強,等.D型打結器Pro/Engineer仿真及動作功能分析[J]農機化研究,2009(9):58-60.
[3] 陳龍健,李 誠,張安琪,等.基于逆向工程的D型打結器重構與運動仿真[J].農業機械學報,2014,45(12):104-108.
[4] 劉智強.D型打結器鉗嘴結構性能分析研究[D].呼和浩特:內蒙古農業大學機電工程學院,2009.
[5] 李 慧,王慶杰,何 進,等.打結器驅動齒盤打結性能對比試驗研究[J].農業工程學報,2012,28(7):27-33.
[6] 張安琪,陳龍健,董 浩,等.D型打結器割繩脫扣機構空間結構參數分析[J].農業機械學報,2017,48(1):73-80.
[7] 李 慧,何 進,李洪文,等.方草捆壓捆機打結器空間參數研究[J].農業機械學報,2013,44(8):99-105.
[8] 李海濤,熊 亞,陳龍健,等.打結器割繩脫扣機構磨損分析與改進設計[J].農業機械學報,2015,46(3):118-124.
[9] 尹建軍,張萬慶,陳亞明,等.打結器夾繩-繞扣-鉗咬動作參數分析與打結試驗[J].農業機械學報,2015,46(9):135-143.
[10] HE L, ZHANG Q, CHARVET H J. A knot-tying end-effector for robotic hop twining[J].BiosystemsEngineering,2013,114(3):344-350.
[11] 王慧娟.面向微創手術機器人系統的縫合打結行為研究[D].天津:天津大學機械工程學院,2012.
[12] 王宇銳.海帶打結原理研究及海帶打結機器人系統設計[D].哈爾濱:哈爾濱工業大學船舶工程學院,2011.
[13] 徐國寶,馬金鳳,王延軍,等.基于ADAMS的跌落式裝箱機動力學仿真研究[J].包裝與食品機械,2016(1):44-47.
[14] 李海軍,楊兆建.Adams中鋼絲繩索類物體建模方法研究[J].機械管理開發,2007,97(4):4-5,7.
猜你喜歡
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
科技傳播(2019年22期)2020-01-14 03:06:54
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
電子制作(2018年18期)2018-11-14 01:48:24
汽車工程學報(2017年2期)2017-07-05 08:13:02
山東工業技術(2016年15期)2016-12-01 05:31:22
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44