面向對象的高光譜遙感影像稀疏表示分類
2018-03-19 08:35:09呂道雙
測繪工程 2018年4期
關鍵詞:分類
徐 銳,林 娜,呂道雙
(重慶交通大學 土木工程學院,重慶 400074)
隨著高光譜遙感技術的飛速發展,高光譜數據日益增多,但對高光譜遙感影像的處理能力卻滯后于獲取影像的能力,造成帶有海量信息的高光譜影像數據無法為人所用。在遙感影像處理技術發展的初期,人們是基于每一個像元進行處理的,隨著遙感影像空間分辨率的不斷提高以及對影像不斷深入的理解,發現每個像元之間并非是相互獨立存在的,尤其是相鄰的像元在空間上具有一定的連續性。于是,提出一種基于對象的遙感影像處理方法,該方法處理的基本單元為獨立對象,即由一些同質像元組成的塊。面向對象的方法考慮了真實地物的分布規律,同時,該方法利用了遙感影像的空間信息和光譜信息,有效地抑制“椒鹽噪聲”[1],在處理的數據量和速度方面,面向對象的方法均比較優越。其實際應用從最開始的土地利用[2-3]、森林管理與監測[4],到精細分類[5]、居民區與建筑提取[6]、車輛檢測[7]等,應用領域逐步擴大。
稀疏表示是一種利用盡可能少的原子最優表示原始輸入信號的方法,其突出的作用在于降維。針對高光譜遙感數據光譜維數高、數據量大的特點,利用稀疏表示的方法對其處理是最合適不過了。近年來,研究發現[8-11]高光譜圖像具有較好的光譜稀疏性,其本質是像元光譜特征在某些基上是稀疏的[12]。Dai和Milenkovic[13]首次將基于光譜稀疏性的稀疏表示分類方法引入高光譜圖像分類;Yang等[14]提出基于Fisher判別的稀疏表示字典學習(FDDL)方法,使得字典更加具有代表性。目前基于稀疏表示分類方法的研究,主要為學習字典的改進和分類器的改進,如王喆正[15]、秦振濤[16]等在字典學習中更多地考慮空間關系信息;袁宗澤[17]、宋相法[18]等改進了分類器。這些方法一開始的處理單元均是基于像素層進行的,對于高分辨率的遙感影像,處理結果往往存在零碎圖斑,不符合實際地物分布。
本文結合面向對象和稀疏表示的優點,提出一種面向對象的高光譜遙感影像稀疏表示分類。該方法首先從高光譜遙感影像中提取標準的4個波段(近紅外、紅、綠、藍)組成多光譜影像,并對其進行面向對象的影像分割,得到同質的對象塊;接著計算每一個對象塊在各個波段上的均值,用此均值來表示該對象塊的屬性;最后,在每一類別中選取少量的樣本進行樣本訓練,并循環優化稀疏表示中的過完備字典和稀疏系數,訓練結束后進行高光譜影像的分類,得到分類結果。其技術流程如圖1所示。

圖1 技術流程圖
1 面向對象的影像分割及稀疏表示理論
從圖1可以看出,本文研究的主要內容為兩部分,即面向對象的影像分割和基于Fisher字典學習的稀疏表示分類。
1.1 面向對象的影像分割
影像分割其實質是利用一定的算法將影像按照一定的特征組合成獨立感興趣區域,通過影像分割及其基于分割的要素提取、特征提取和參數測量等,將原始影像轉化為更抽象更緊湊的形式,使得更高層次的影響分析和理解成為可能[19]。
面向對象的方法是對影像區域進行特征識別和信息提取的過程,采用的是區域合并分割算法。區域合并是將具有相似特征的像元合并成一個獨立的對象塊,這個過程考慮了光譜特征、空間特征、形狀特征。區域合并的目的是使得同一區域對象內各像素的異質性最小,僅僅考慮光譜異質性最小會導致分割結果出現不符合實際情況的零碎圖斑,所以還需要考慮形狀異質性標準[20]。
1.2 基于Fisher字典學習的稀疏表示
Fisher字典學習算法(Fisher Discriminative Dictionary Learning, FDDL)的目標是通過Fisher鑒別準則獲取新字典,滿足對應類的子字典具有較好的線性表示該類樣本的能力和較弱表示其他類樣本的能力[17]。
假設稀疏表示字典D=[D1,D2,…,Dc],Di是對應類i的子字典,訓練樣本集A=[A1,A2,…,Ac],設X是A在字典D上的編碼系數矩陣,記為X=[X1,X2,…,Xc],即A≈DX,Xi是Ai在D上的編碼系數子矩陣[21]。FDDL模型為
式中:r(A,D,X)為判別保真項;‖X‖1為稀疏性約束項;f(X)為附加在系數矩陣X上的Fisher判別系數項;λ1和λ2為調節參數,λ1>0,λ2>0。
對于高光譜影像來說,通過選取的訓練樣本A,每一個樣本為一列,行數等于高光譜的光譜維數。經過字典學習的過程,得到一個列數大于行數的過完備字典D,在這個過程中加入了Fisher判別準則進行約束。利用得到的字典,對原始輸入的高光譜遙感影像進行稀疏表示,求得原始影像在字典D下的稀疏系數。
2 面向對象的高光譜遙感影像稀疏分類實驗
2.1 實驗數據
本次實驗影像是2015-08-30,馬來西亞(Malaysia)米里(Miri)北部地區可見光近紅外(VNIR)航空高光譜CASI影像,經過一系列的預處理及裁剪,得到影像大小為700像素×900像素,波段數182個,坐標系為WGS1984,空間分辨率為0.5 m,如圖2所示。

圖2 高光譜影像立方體
2.2 面向對象的影像分割
高光譜遙感影像具有數據量大的特點,若直接對其進行處理將會費時費力,面向對象的影像分割也并不需要影像的全部光譜均參與計算。于是,從高光譜影像中提取標準的近紅外(波長902.69 nm,154波段)、紅(波長9 692.62 nm,93波段)、綠(波長531.04 nm,46波段)、藍(波長449.36 nm,22波段)4個波段組成高分辨率遙感影像,對其進行面向對象的影像分割,這樣在一定程度上減小了計算量。在進行影像分割時需要考慮分割的尺度因子、形狀因子、緊致度因子。本文經過大量實驗,以相同地物盡可能地作為一個對象、不同地物作為不同對象為準則。實驗最終得到尺度參數為250、形狀參數為0.3、緊致度參數為0.7。分割結果如圖3所示,分割結果共有對象1 336塊。
將分割后的對象與高光譜進行疊加,并計算每一個對象在各個波段的光譜均值,作為該對象的統一值,代表著該對象所代表的地物。此處相同地物的均值可能存在不相等的情況。
2.3 稀疏表示分類
稀疏表示分類是在給定的字典中選取較少的原子來表示原始信息,而這個字典的獲取是通過訓練樣本得到的,所以獲取有效的訓練樣本也是比較關鍵的一步。在本文方法中,所處理的基本單元是單個對象,所以樣本也是由單個對象在各波段上的光譜均值組成。基于本次實驗的影像數據,現分為House1,House2,Road,Plant,BareLand,CementLand這6大類。經過人工提取每一類中若干數量且具有代表性的對象作為該類別的樣本,樣本的選取原則是:①具有明顯區分標志的可以少取,區分難度較大的需多取,如形狀規則、屋頂材質可明顯區分的房屋House1可少取,屋頂與瀝青里面材質相同的房屋House2需多取;②樣本的選擇需明確類別,如與裸地相近的稀植被地不選;③因光照或遮擋或其他情況引起的同一地物在影像上顯示不同的地物需多取,如覆蓋范圍較廣的植被和道路。將所有樣本合在一塊得到總體訓練樣本,并標記每一類樣本標簽號,如表1所示。本次實驗每一類樣本平均數量為11.3個對象,共計樣本數為68個對象,占總對象數目的5.09%。對此樣本進行訓練,得到字典,用于后續分類。樣本所選取位置如圖4所示。

表1 訓練樣本名稱、標簽號、樣本數

圖4 面向對象稀疏分類選取的對象樣本
利用人工選取的樣本,進行稀疏表示得到字典,在此過程中,加入Fisher準則,通過循環優化,得到最優字典,利用字典進行稀疏表示原始輸入的影像,進行分類。分類結果如圖5所示。

圖5 面向對象的稀疏表示分類結果
2.4 基于像素層的分類
基于像素層的稀疏表示分類不涉及到影像的分割問題,直接從影像中提取一定數量的像素作為樣本進行訓練。這里樣本的選取原則是選取最具有代表性的區域,并且與面向對象的方法選取的樣本保持重合,以便于結果比較。
在本次實驗中,第一次選取樣本均取10像素×10像素的樣本塊,共計600個像素樣本,占影像總像素的0.10%。樣本選取位置如圖6中亮綠色色塊所示。基于此進行樣本的訓練和后續的稀疏表示分類,得到分類結果,見圖7。此次分類結果存在錯分類與漏分類的問題,如House1類地物沒有很好地分別出來;House2類與Road類被劃分為同一類;Plant類、BareLand類以及CementLand類存在錯誤分類情況。

圖6 兩次基于像素層分類選擇的樣本位置

圖7 第一次取樣本基于像素層的分類結果
基于第一次選取的樣本效果不理想,在原樣本的基礎上增加一倍的樣本數量,增加樣本也同樣取10像素×10像素的樣本塊,樣本選取位置如圖6中亮黃色色塊所示。加上第一次選取的樣本數共計1 200個像素樣本,占影像總像素的0.2%。基于此進行第二次樣本的稀疏表示分類,分類結果如圖8所示。分類結果只被分了2類,主要為道路類和非道路類,比第一次選取樣本分類的結果更加模糊粗糙。
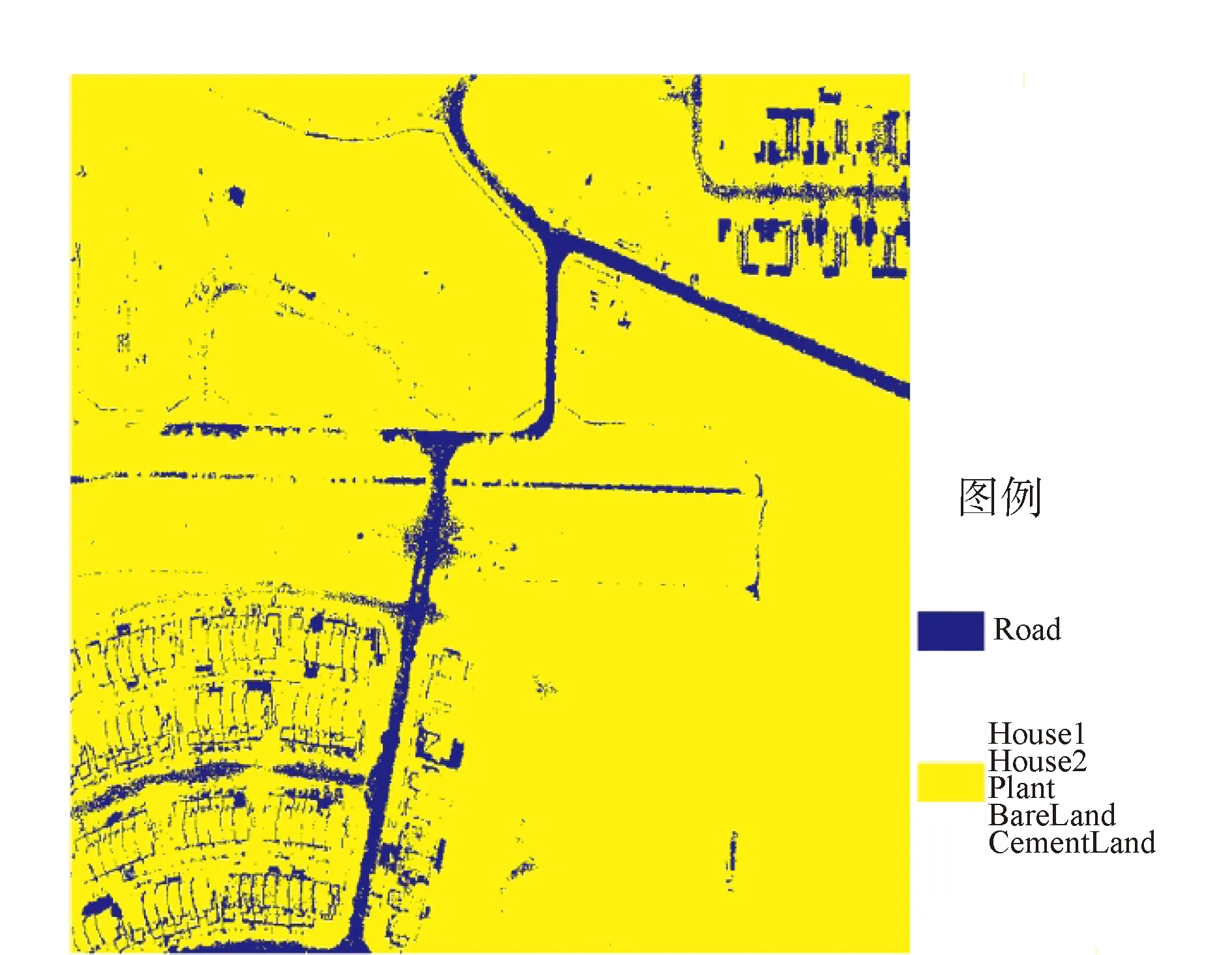
圖8 第二次選取樣本的分類結果
2.5 實驗結果分析
對比兩次實驗,現從樣本、計算時間、分類結果3個方面進行分析。
基于像素層的樣本選取和基于對象的樣本選取均是人工目視選取,樣本的數量均取決于實驗對象各類別之間區分的難易程度,在樣本選取工作量上,這兩種方法處于一個級別。但基于像素層樣本的選取無法達到像基于對象方法那樣具有廣泛的代表性,基于對象的樣本對象相當于像素層里同類的多個像素樣本。若基于像素層選取樣本想要達到基于對象層一樣的效果,則勢必會增加樣本選取的工作量和計算量。
稀疏表示分類過程中計算量是由訓練樣本的數量和實驗區待分類遙感影像大小決定的,稀疏表示分類主程序耗時見表2。可以看出基于像素層第一次樣本的稀疏表示分類在運行時間上是基于對象的3.6倍左右,第二次樣本的分類是基于對象的11.6倍左右。隨著樣本增加一倍,基于像素層的稀疏表示分類耗時增加了近3.3倍。

表2 本文兩次實驗耗時比較
分類結果的優劣是取舍一種方法最主要的指標。本文中兩次基于像素層的稀疏分類表示在分類結果中表現出錯分類、漏分類現象,尤其是對同譜異物現象,分類結果較為失敗。從圖7、圖8均可以看到,House1類地物始終無法正確地被區分出來,瀝青道路與瀝青屋頂的房屋無法有效地區分開,Plant類、BareLand類以及CementLand類存在錯分。同時,基于像素層的稀疏表示分類存在零碎圖斑現象,這也與實際地物不相符合。而面向對象的稀疏表示分類則很好地解決了這些問題,雖然也存在一定的偏差,但是原始遙感影像的分辨率及實際地物的復雜程度也影響地物的分類結果。
3 結語
本文提出一種面向對象的稀疏表示分類算法,將面向對象的影像分割與稀疏表示分類相結合,同時在稀疏表示字典學習過程中加入了Fisher準則。該方法取得了一定的效果,但也存在一定的不足:
1)面向對象的影像分類的精度和準確度需要進一步的研究,因為這決定后面分類的準確度;
2)樣本選取存在一定的人為感性認識;
3)系數表示分類的算法還需要優化,以求更加快速更加準確地得到高精度的分類結果。
[1] YU Q, GONG P, CLINTON N et al. Object-based detailed vegetation classification with airborne high spatial resolution remote sensing imagery[J]. Photogrammetric Engineering and Remote Sensing. 2006, 72(7): 799-811.
[2] EVANS T L, COSTA M. Land cover classification of the Lower Nhecolandia subregion of the Brazilian Pantanal Wetlands using ALOS/PALSAR, RADARSAT-2 and ENVISAT/ASAR imagery[J]. Remote Sensing of Environment. 2013, 128: 118-137.
[3] TOURE S I, STOW D A, WEEKS J R et al. Histogram curve matching approaches for object-based image classification of land cover and land use[J]. Photogrammetric Engineering and Remote Sensing. 2013, 79(5): 433-440.
[4] MALLINIS G, KOUTSIAS N, TSAKIRI-STRATI M et al. Object-based classification using Quick-bird imagery for delineating forest vegetation polygons in a Mediterranean test site[J]. ISPRS Journal of Photogrammetry and Remote Sensing. 2008, 63(2): 237-250.
[5] KIM M, WARNER T A, MADDEN M et al. Multi-scale GEOBIA with very high spatial resolution digital aerial imagery: Scale, texture and image objects[J]. International Journal of Remote Sensing. 2011, 32(10): 2825-2850.
[6] MENG X, CURRIT N, WANG L et al. Detect residential buildings from lidar and aerial photographs through object-oriented land-use classification[J].Photogrammetric Engineering and Remote Sensing. 2012, 78(1): 35-44.
[7] SALEHI B, ZHANG Y, ZHONG M. Automatic moving vehicles information extraction from single-pass world View-2 imagery[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing. 2012, 5(1): 135-145.
[8] WU J J K, FANG Y.Hyperspectral image compression based on the framework of DSC using 3D-waveIet and LDPC[C]. Proc. SPIE.2009.
[9] CHARLES A S, OLSHAUSEN B A, ROZELL C J. Learning sparse codes for hyperspectral imagery[J]. IEEE Journal of Selected 7ropics in Signal Processing, 2011, 5(5): 963-978.
[10] VALIOLLAHZADEH S, YIN W. Hyperspectral data reconstruction combining spatial and spectral sparsity[R]. Rice University CAAM Technical Report TR10-29, 2010.
[11] SCOTT D, THOMPSON J. Probability density estimation in higher dimensions. In Computer Science and Statistics: Proceedings of the Fifteenth Symposium on the Interface, 1983, 173-179.
[12] THEILER J, GLOCE K. Sparse linear filters for detection and calssification in hyperspectral imagery[C]. SPIE, 2006: 6233-623301.
[13] DAI W, MILENKOVIC O. Subspace pursuit for compressive sensing signal reconstruction[M]. IEEE Transactions on Information Theory, 2009, 55(5): 2230-2249.
[14] YANG M, ZHANG L, FENG X, et al. Fisher discrimination dictionary learning for sparse representation[A]. Proc. Of Computer Vision (ICCV),2011 IEEE International Conference on IEEE[C]. 2011, 543-550.
[15] 王喆正. 基于字典學習的高光譜圖像分類方法研究[D].南京:南京大學,2016.
[16] 秦振濤,楊武年,楊茹,等. 基于結構性字典學習的高光譜遙感圖像分類[J]. 西南交通大學學報,2015,50(2):336-341.
[17] 袁宗澤,孫浩,計科峰,等. 基于Fisher字典學習稀疏表示的高光譜圖像分類[J]. 遙感技術與應用,2014,29(4):646-652.
[18] 宋相法,焦李成. 基于稀疏表示及光譜信息的高光譜遙感圖像分類[J]. 電子與信息學報,2012,34(2):268-272.
[19] 章毓晉. 圖像分割[M]. 北京:科學出版社,2000.
[20] 戴昌達,姜小光,唐伶俐. 遙感圖像處理應用于分析[M]. 北京:清華大學出版社, 2004.
[21] 陳思寶,趙令,羅斌. 基于核Fisher判別字典學習的稀疏表示分類[J]. 光電子·激光,2014,25(10):2000-2008.
猜你喜歡
西北民族大學學報(自然科學版)(2021年4期)2021-12-29 02:54:24
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
大眾健康(2021年6期)2021-06-08 19:30:06
小聰仔(科普版)(2020年12期)2021-01-18 09:16:52
東方少年·布老虎畫刊(2020年4期)2020-06-08 15:48:10
學生天地(2019年32期)2019-08-25 08:55:22
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
小天使·一年級語數英綜合(2017年11期)2017-12-05 18:49:56
初中生世界·七年級(2017年9期)2017-10-13 22:27:46