福田歐曼GTL重卡汽車前軸檢驗儀的設計
2018-04-02 09:42:29李亞文
機械工程與自動化 2018年1期
關鍵詞:汽車
李亞文
(山西機電職業技術學院,山西 長治 046011)
0 引言
隨著電子技術的大力發展,汽車的電控系統不斷完善,使得行駛的安全性、動力性、燃油經濟性、操縱穩定性和乘坐舒適性也有了很大的改善。由于汽車的結構變得更加復雜和緊湊,在汽車的修理過程中會遇到很多棘手的問題,為了能夠快速、準確、方便地診斷汽車的運行故障和檢測汽車的使用性能,必須大力發展汽車檢測技術和檢測設備。為此,本文針對福田歐曼GTL重卡汽車設計了一套前軸激光檢驗儀,可對汽車前軸進行精確地檢驗(包括前軸受損修復后的檢驗)。
1 福田歐曼GTL重卡汽車前軸結構及受力分析
1.1 前軸結構
福田歐曼GTL重卡汽車的前軸是軸式轉向橋的主體,其斷面形狀采用工字形,用以提高抗彎強度、減輕質量。前軸兩端翹起部分斷面形狀逐漸由工字型向方形過渡,至兩端略呈方形[1]。由于前軸中部下凹使發動機的位置得以降低,進而降低汽車質心,擴展駕駛員視野,減小傳動軸與變速器輸出軸之間的夾角。汽車前軸兩端加粗呈拳形,其中有通孔,主銷插入孔內與轉向節連接。為防止主銷在孔內轉動,用帶有螺紋的楔形銷將其固定。前軸下沉部分的兩端各有一個加寬面,上面鉆有4個螺栓孔,用以安裝鋼板彈簧。在前軸兩端裝有限位凸塊,與轉向節上的限位螺栓相配合,以調整轉向輪的最大轉角[2]。
1.2 前軸受力分析
(1) 在垂直平面內(對地面而言),車輪的法向反作用力通過前軸和鋼板彈簧傳給車架,使前軸承受垂直彎曲力矩。
(2) 在水平平面內,緊急制動時產生的縱向制動力以及起步過猛產生的縱向慣性力都通過前軸傳給車架,使前軸承受水平彎曲力矩。
(3) 制動時前軸在鋼板彈簧座外側的部分還承受制動力引起的扭矩[3]。
2 汽車前軸失效形式
汽車使用條件相當復雜,前橋承受經常變化的載荷,前軸作為前橋的主要部件之一承受多重作用力,主要是垂直彎矩。當汽車制動時,前軸負荷增大;當汽車通過凹凸不平路面時,前軸受沖擊負荷,容易引起金屬疲勞,從而在彎曲應力最大處產生裂紋。所以前軸的剛度和強度最為重要,影響汽車的使用壽命和安全性能,如果不能滿足其強度和剛度的要求,可能就會發生前軸的斷裂[4],如圖1所示。主銷孔處最容易發生斷裂,尤其是與轉向節連接的地方。
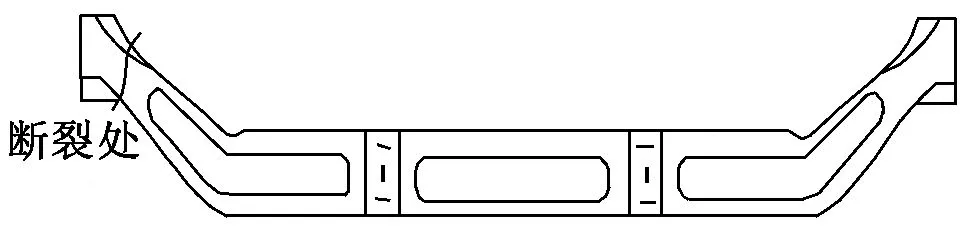
圖1 前軸形狀及易斷裂位置
3 前橋的常見故障
汽車的轉向系(包括前橋)故障不但決定于其本身,而且還與行駛系及底盤的其他部分密切相關。汽車前橋經長期使用后,各部件會產生磨損、變形甚至斷裂,這些缺陷將使汽車的操縱穩定性能、制動性能和傳動性能降低,影響汽車的正常行駛。因此,對前橋的故障要及時診斷與排除。
前橋的技術故障現象往往和轉向系聯系在一起,常見的故障有轉向沉重、低速擺頭、行駛跑偏、高速擺振、輪胎不正常磨損等[5]。
4 福田歐曼GTL重卡汽車前軸檢驗儀的設計
4.1 前軸檢驗標準
福田歐曼GTL重卡汽車前軸的檢驗標準如下(本文的檢驗標準以福田歐曼GTL重卡汽車維修手冊為依據):經探傷檢查不得有任何裂紋;鋼板彈簧座上U型螺栓承孔及定位孔的磨損量不得大于1 mm ;兩鋼板彈簧座平面在其公共平面法線方向的位置度公差應為1.0 mm;由于鋼板彈簧座平面橫向長度大于160 mm,且平面度公差為0.5 mm,因此磨損修復后鋼板彈簧座厚度減少量不得大于2 mm;前軸主銷孔端面磨損修復后的厚度減少量不得大于2 mm。
4.2 前軸檢驗系統的結構以及主要部件的選取
前軸檢驗系統主要由激光器、透鏡、角錐棱鏡等組成,其結構框圖如圖2所示。
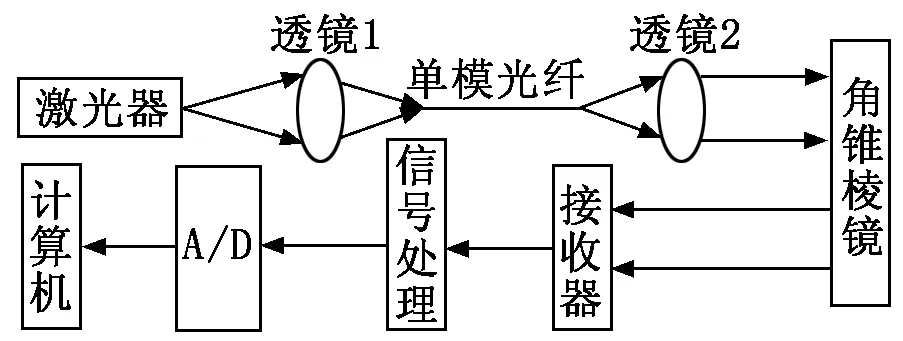
圖2 前軸檢驗系統結構框圖
4.2.1激光器的選取
本前軸檢驗系統的激光器選用紅寶石激光器。紅寶石激光器一般用氙氣作光泵激勵,氙燈以脈沖方式工作,脈沖持續時間為幾毫秒,單脈沖輸出能量為幾千焦耳,激光效率為25%左右。紅寶石激光器對光泵的要求為:①應該使光泵的輸出光譜落在激光工作物質的吸收帶內;②應考慮光泵光源的使用壽命。同時,為了使光泵光源發出的光均勻有效地照射到紅寶石晶體棒上,必須把光源和晶體棒放置在一個聚光腔內,聚光腔可以是圓柱形或橢圓柱形,無論哪種形狀的聚光腔,腔體內壁必須高度拋光,并鍍有高反射率的膜層,常用的為鋁、銀或金等反射膜[6]。
4.2.2角錐棱鏡的選取
角錐棱鏡是一種作為回射用的玻璃元件,它由3個90°角將入射光束進行反射。這些玻璃角的誤差必須在幾秒精度以內,入射面可以有5′以上的誤差,這樣角錐棱鏡的性能才不會受到明顯的影響[7]。角錐棱鏡材料為BK7,尺寸為Φ12.7 mm的六棱角錐,此六棱角錐棱鏡的綜合度誤差為±5′。
4.3 前軸檢驗儀的工作原理
激光由紅寶石激光器射出,經過透鏡1的耦合進入到單模光纖里,激光由單模光纖傳輸,再經過透鏡2的擴散,然后通過角棱錐鏡反射到接收器上,最后經信號處理器和A/D轉換器到達計算機。測量時,激光器和接收器放在前軸的一端,角錐棱鏡沿前軸移動,激光由角錐棱鏡反射在接收裝置上,角錐棱鏡在移動的過程中如果前軸發生變形,會使激光光束和角錐棱鏡之間產生相對位移,接收器上的激光由于受到前軸變形的影響,從而使激光的位移發生了偏移,接收器上輸出的電壓信號和激光在接收器上的位移量成正比,電壓信號經A/D轉換后進入計算機,計算機將這些信號進行匯總、編譯和處理,將電信號轉變為數字信號,得到較為準確的偏移量,如果偏移量小于0.80∶1.00,則表明前軸彎曲較小,反之,則需要對前軸進行校正。
在這個檢驗系統中,采用了四象限探測原理,四象限探測器測量的是激光在角錐棱鏡上的光斑位置變化,用特定的計算方法來測量角錐棱鏡的激光直線度誤差[8],如圖3所示。
圖3中,黑色區域表示光斑的位置,圖3(a)中光斑位于正中間,光線沒有偏移;圖3(b)中光斑出現偏離,4個象限將光斑分成4份A、B、C、D,對應的面積分別為W1、W2、W3、W4,4個象限產生的阻抗電流分別為i1、i2、i3、i4。由(i1+i4) /(i2+i3)的值可以確定角錐棱鏡的直線度誤差。角錐棱鏡的位移與光束移動的關系如圖4所示。角錐棱鏡在移動的過程中,如果前軸有變形,則會在水平和垂直兩個方向產生位移偏量δ,激光在經角錐棱鏡的反射后會產生2δ的偏移,所以,角錐棱鏡作為檢測的元件能夠使檢測儀靈敏度提高(提高1倍)。前軸檢驗儀工作示意圖如圖5所示。
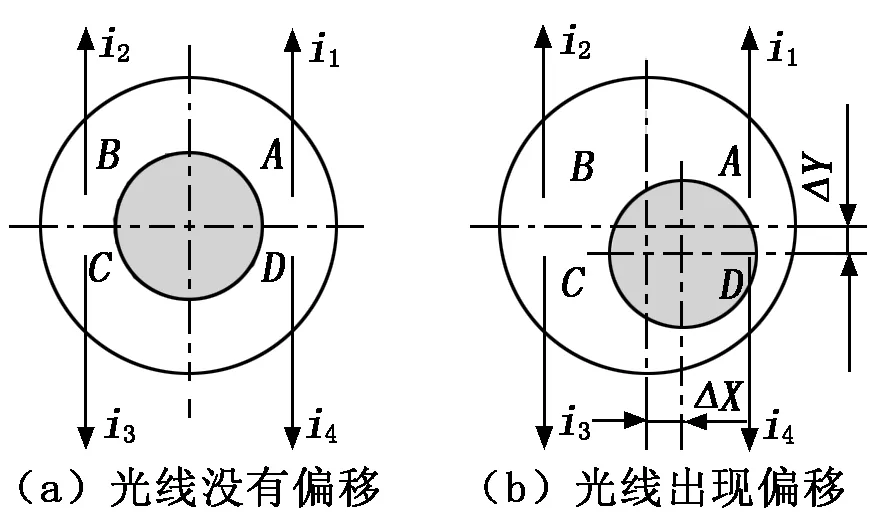
圖3 檢驗系統探測器原理
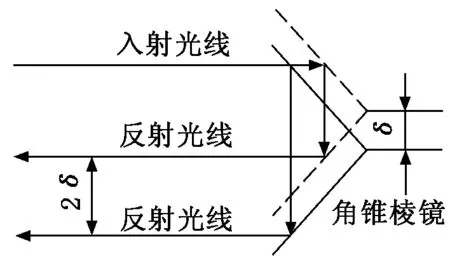
圖4 角錐棱鏡位移與光束移動的關系
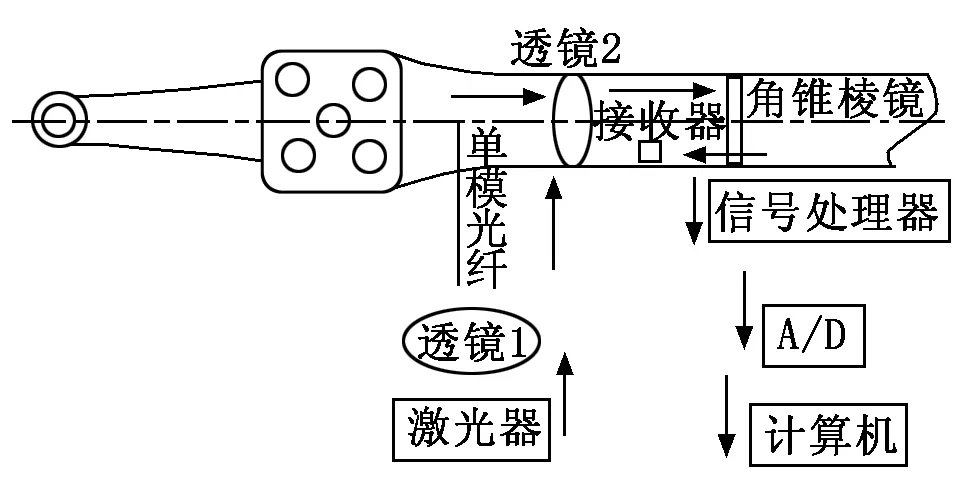
圖5 前軸檢驗儀工作示意圖
5 結語
激光檢驗儀是汽車前軸檢驗的重要工具,可以精確測量出汽車前軸由于受到外界沖擊力而產生的變形量,實現精確無誤的測量功能。
參考文獻:
[1]丁鳴朝.北京福田系列汽車使用與檢修[M].北京:金盾出版社,2015.
[2]吳文琳.圖解汽車底盤構造[M].北京:化學工業出版社,2007.
[3]陳明宏.底盤修理[M].北京:國防工業出版社,2014.
[4]李燕華.北京福田系列汽車的構造與維修[M].北京:國防工業出版社,2012.
[5]張建俊.汽車診斷與檢測技術[M].北京:人民交通出版社,2013.
[6]姚啟鈞.光學教程[M].第4版.北京:高等教育出版社,2008.
[7]金國藩,李景鎮.激光測量學[M].北京:科學出版社,2009.
[8]陳強華,吳健,殷純永.雙頻激光遠程直線度/同軸度測量系統[J].中國激光,2002(7):15-16.
猜你喜歡
人民交通(2020年22期)2020-11-26 07:36:44
小學生優秀作文(低年級)(2020年4期)2020-07-24 08:31:08
汽車與安全(2019年9期)2019-11-22 09:48:03
汽車與安全(2019年8期)2019-09-26 04:49:10
汽車與安全(2019年5期)2019-07-30 02:49:51
汽車觀察(2019年2期)2019-03-15 06:00:06
汽車與新動力(2018年2期)2018-05-09 00:31:56
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50
