純電動汽車復合電源功率分配策略研究
2018-04-08 09:59:05葉揚波盤朝奉
重慶理工大學學報(自然科學) 2018年3期
關鍵詞:控制策略
陳 燎,葉揚波,盤朝奉,b
(江蘇大學 a.汽車與交通工程學院; b.汽車工程研究院, 江蘇 鎮(zhèn)江 212013)
隨著國民經(jīng)濟的發(fā)展及消費者購買力的增強,國內(nèi)汽車保有量持續(xù)增加,不僅使社會面臨著能源枯竭的威脅,還帶來一系列環(huán)境問題,如大氣污染、水體污染、土壤污染、固態(tài)廢棄物污染和環(huán)境噪聲污染等。電動汽車的出現(xiàn)為當代燃油汽車帶來的能源與環(huán)境污染等嚴重問題提供了很好的解決途徑,電動汽車的發(fā)展已然是一種必然的趨勢[1-5]。與傳統(tǒng)汽車相同的是,電動汽車的行駛同樣需要動力源具有較高的比能量、比功率、循環(huán)壽命[6]。蓄電池單獨作為汽車的電源時存在充電時間長、比功率低、不能滿足汽車短時間功率需求的問題,嚴重影響汽車的加速、爬坡、制動性能及能量回收效率,不能完全滿足汽車對車載電源的要求[7-9]。為解決上述矛盾,考慮用蓄電池和超級電容儲能裝置構(gòu)成復合電源系統(tǒng),充分發(fā)揮蓄電池比能量高、超級電容比功率高的性能優(yōu)勢,揚長避短,使電源同時具備高比功率和高比能量的性能優(yōu)勢。當然,超級電容的加入增加了質(zhì)量、成本,結(jié)構(gòu)變得復雜,同時對控制策略和精度要求也比較高。
在國外,F(xiàn)IAT公司[10]采用鉛酸蓄電池和超級電容構(gòu)成復合電源系統(tǒng)作為電動汽車動力源,并對使用該復合電源系統(tǒng)的電動汽車在市區(qū)、郊區(qū)及ECE行駛工況下進行性能試驗,試驗結(jié)果表明:在3種不同工況下該復合電源系統(tǒng)的使用可分別節(jié)能40%、20%和14%。日本東京大學的Huang Xiaoliang等[11]對采用超級電容-蓄電池復合電源的小型電動汽車進行研究,為使復合電源具有高能量密度和高功率密度,提出了基于頻率可變?yōu)V波器的能量管理系統(tǒng)及功率分配策略,并在實驗臺架上進行分析,試驗結(jié)果表明:蓄電池和超級電容各承擔負載能量需求的一半,且超級電容能回收30%的能量。在國內(nèi),羅玉濤等[12]基于NEDC循環(huán)工況、依據(jù)整車參數(shù)完成電池組和超級電容組參數(shù)匹配,并設計了復合電源結(jié)構(gòu),采用速度跟隨式多目標優(yōu)化的邏輯門限值控制策略,在Matlab/Simulink環(huán)境下進行仿真。仿真結(jié)果表明:該復合電源結(jié)構(gòu)可使電池壽命提高50%。董昊龍等[13]對動力電池-超級電容復合電源系統(tǒng)的試驗臺架搭建及控制策略設計進行研究,并通過硬件在環(huán)試驗對單一電源供能及復合電源供能進行分析,試驗結(jié)果表明:復合電源系統(tǒng)具有較快的響應,能提供與單一電源系統(tǒng)一致的功率輸出,且能更好地回收再生制動能量。
綜上所述,合理的復合電源結(jié)構(gòu)和功率分配策略能更好地滿足車輛需求和能量回收,因此本文選用DC/DC與超級電容串聯(lián)、然后再與蓄電池并聯(lián)的復合電源結(jié)構(gòu),設計了一種將邏輯門限值控制策略和基于車速的功率分配控制策略相結(jié)合的新的功率分配策略,以充分發(fā)揮兩種策略的優(yōu)勢。
1 復合電源系統(tǒng)總體結(jié)構(gòu)及分析
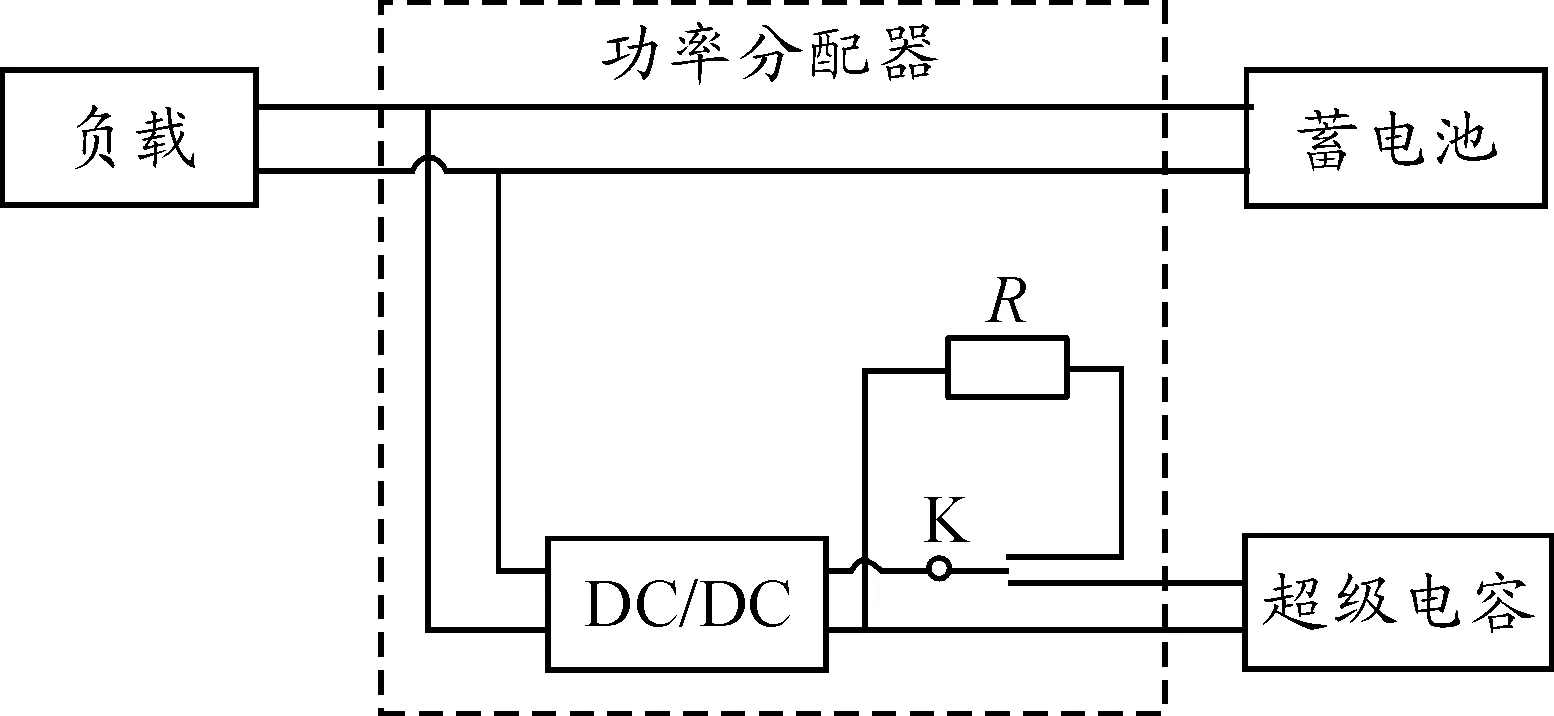
圖1 復合電源系統(tǒng)結(jié)構(gòu)
復合電源系統(tǒng)的組成包括蓄電池、超級電容和功率分配器,其中功率分配器除了包括雙向DC/DC變換器、功率分配策略外,還應包括1個剎車電阻(圖1),當車輛工作在再生制動模式且超級電容SOCUC已達到最大值時用來消耗再生制動能量,保護超級電容,同時滿足車輛制動性能要求。蓄電池直接與母線電流相連,復合電源輸出電壓穩(wěn)定,可提高車輛的穩(wěn)定性;超級電容輸出功率可通過DC/DC變換器控制為車輛提供大功率,降低蓄電池輸出功率,保護蓄電池[14]。這種復合電源系統(tǒng)保證了設計的靈活性、經(jīng)濟性、實用性且成本適中。
2 功率分配策略的制定
常見的復合電源控制策略主要有邏輯門限值控制策略、含濾波思想的邏輯門限值控制策略、基于車速的功率分配控制策略、模糊控制策略[15]。本文設計復合電源系統(tǒng)功率分配策略時主要結(jié)合邏輯門限值控制策略和基于車速的功率分配控制策略。采用邏輯門限值控制策略實現(xiàn)對蓄電池輸出功率的控制,通常以車輛平均需求功率為蓄電池功率輸出門限值[16-17]。根據(jù)車輛在不同時刻的車速確定此刻超級電容SOCUC上、下限值,其中超級電容SOCUC上、下限值僅用于判斷超級電容裝置是否需要預充電。
2.1 超級電容SOCUC上下限值的確定
在復合電源系統(tǒng)功率分配策略下,超級電容具有使車輛從當前車速加速到最高車速的最低能量Emin,又考慮到電源系統(tǒng)受車輛傳動系統(tǒng)能量傳遞效率的影響,以及電氣系統(tǒng)存在的能量耗散,電源系統(tǒng)提供的能量必須比車輛最大動能高50%[18],則有
(1)
選超級電容的SOCUC為其下限值SOCmin l,同時超級電容具有用于回收車輛以當前車速制動的能量而不過充的容量空間,選此時超級電容的SOCUC為其上限值SOCmax l,則有
(2)
(3)
式中:m為車輛的滿載質(zhì)量(kg);vmax為車輛在設定工況下允許的最高行駛車速(km/h);UN為超級電容的額定電壓(V);k2為車輛在再生制動過程中的最大能量轉(zhuǎn)化效率,取值k2=0.4。
2.2 復合電源工作在驅(qū)動模式
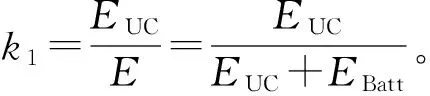
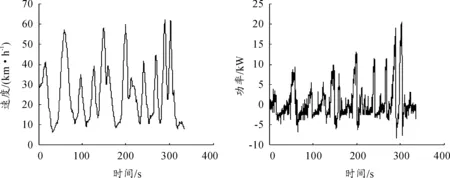
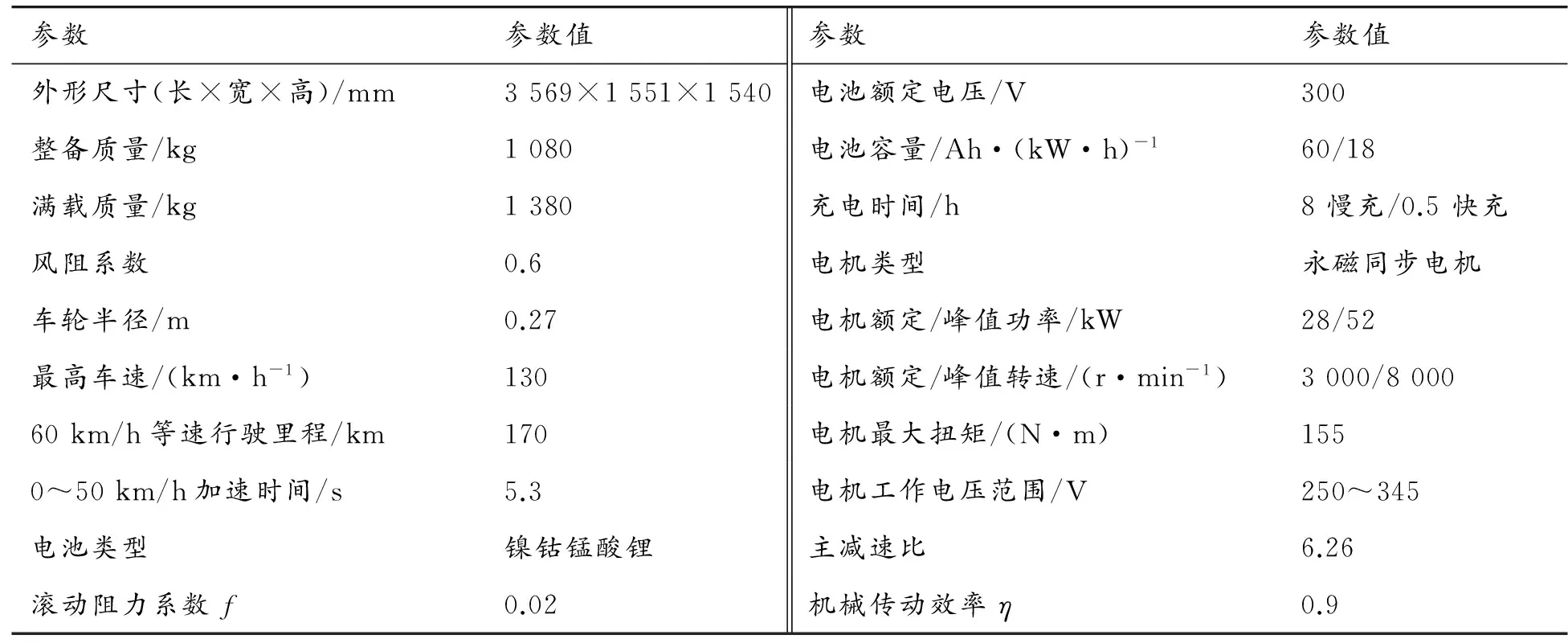
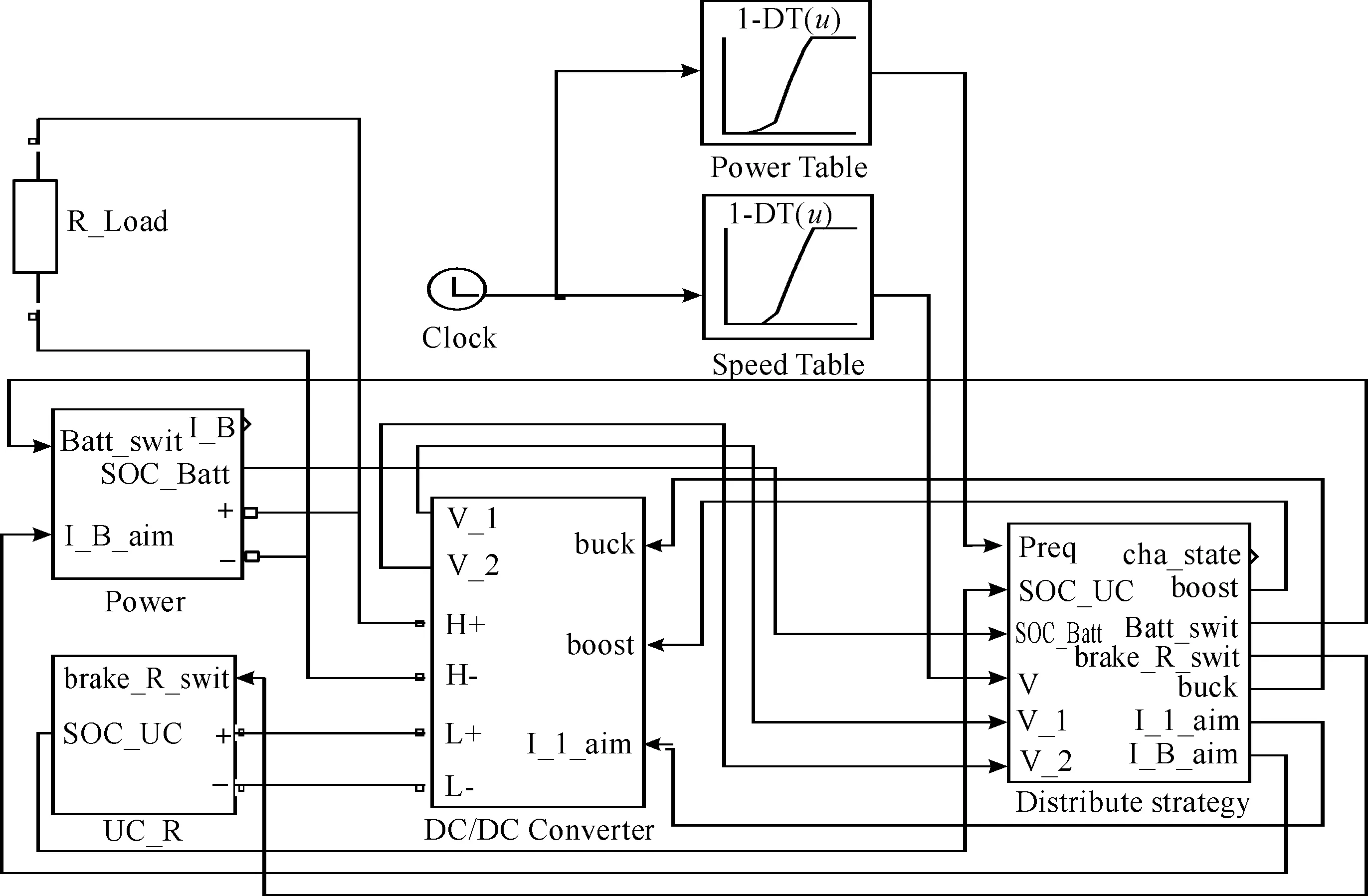
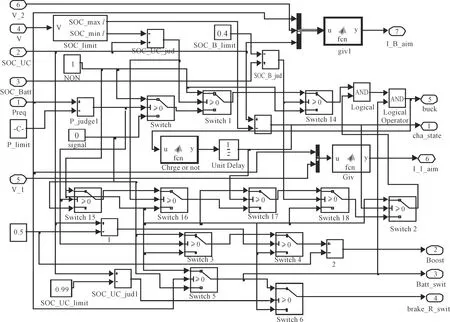
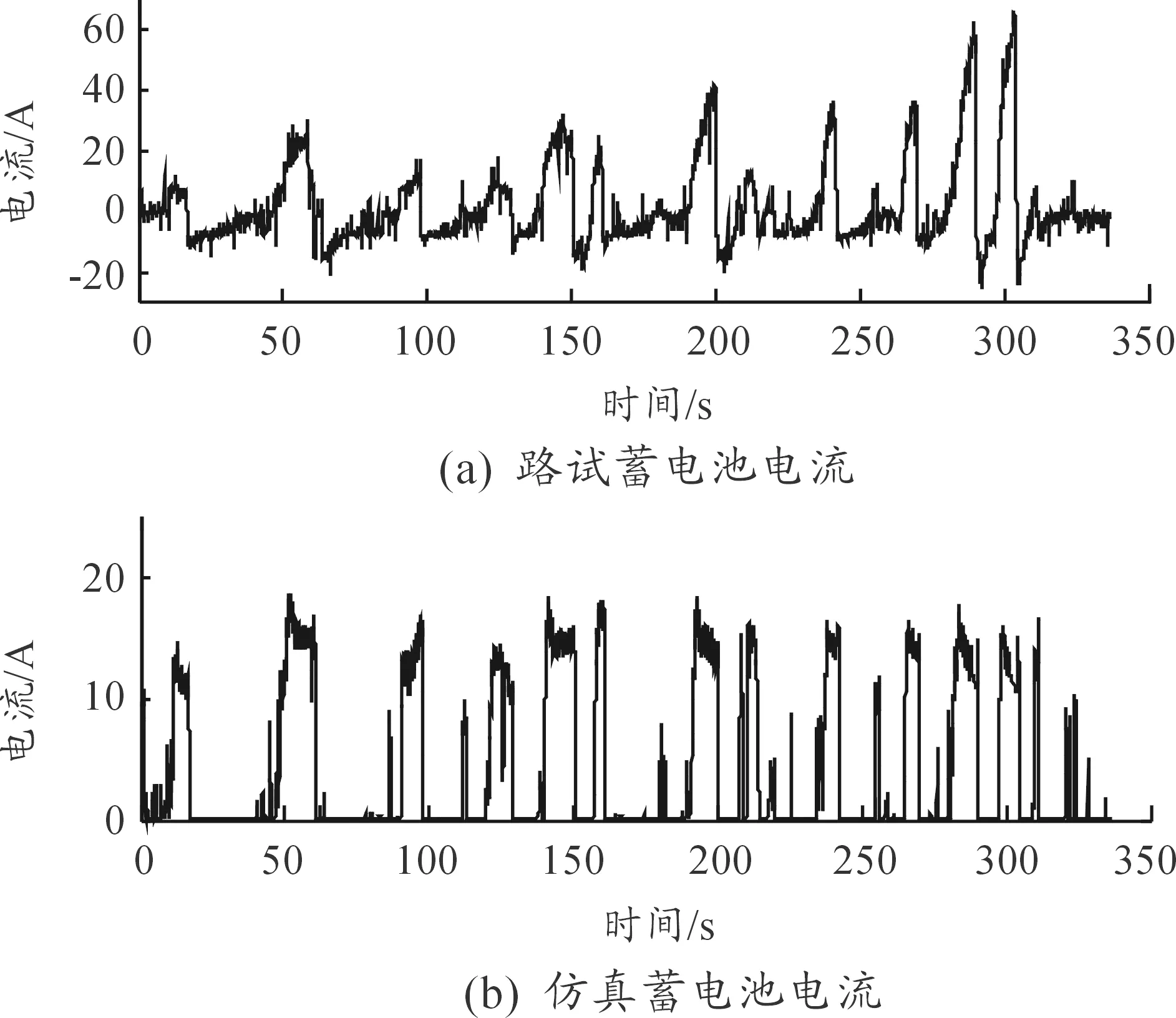
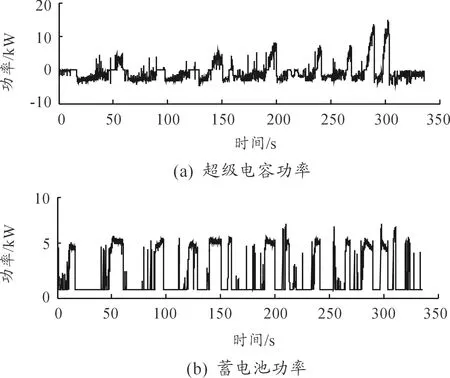
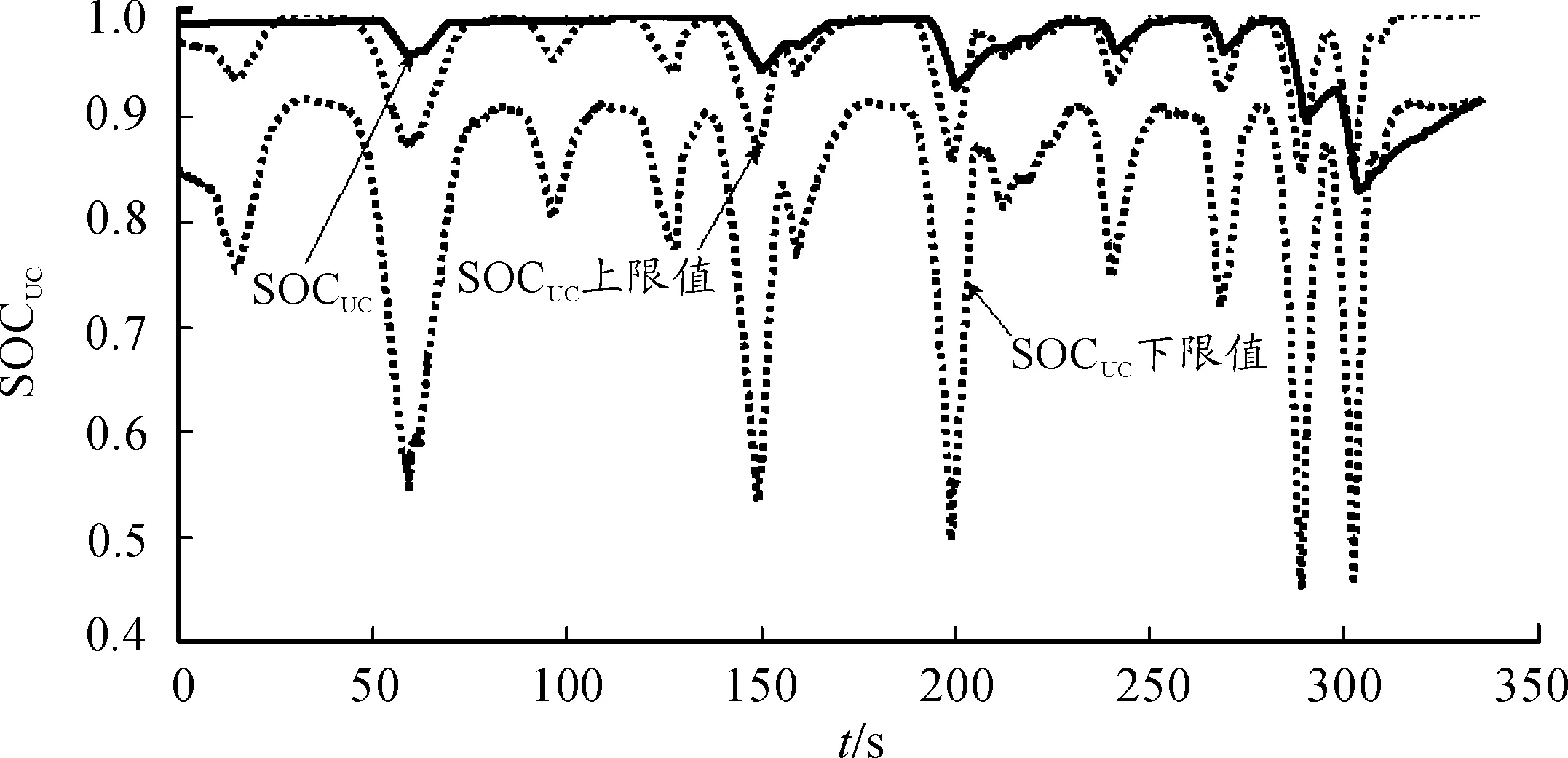
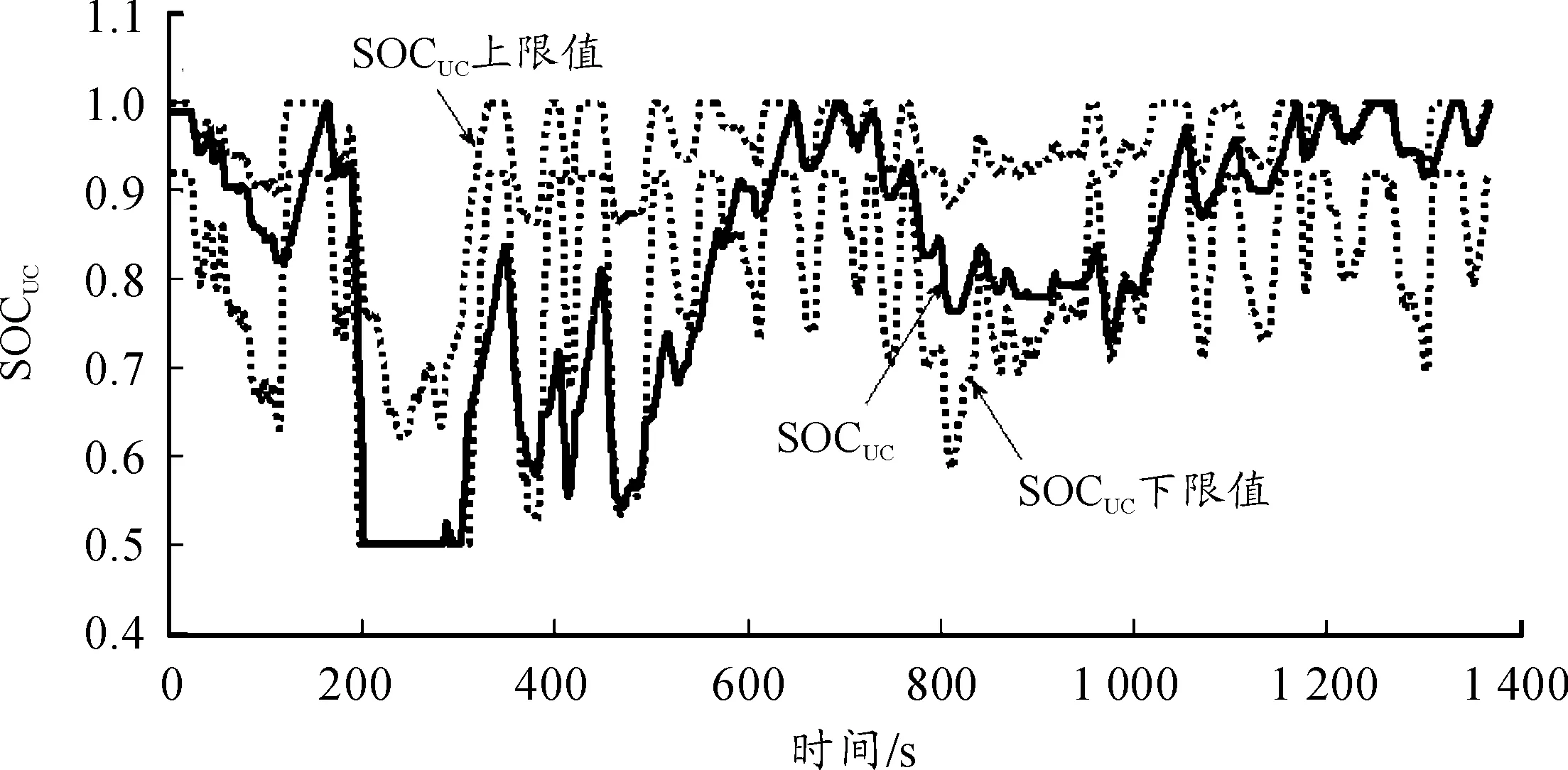
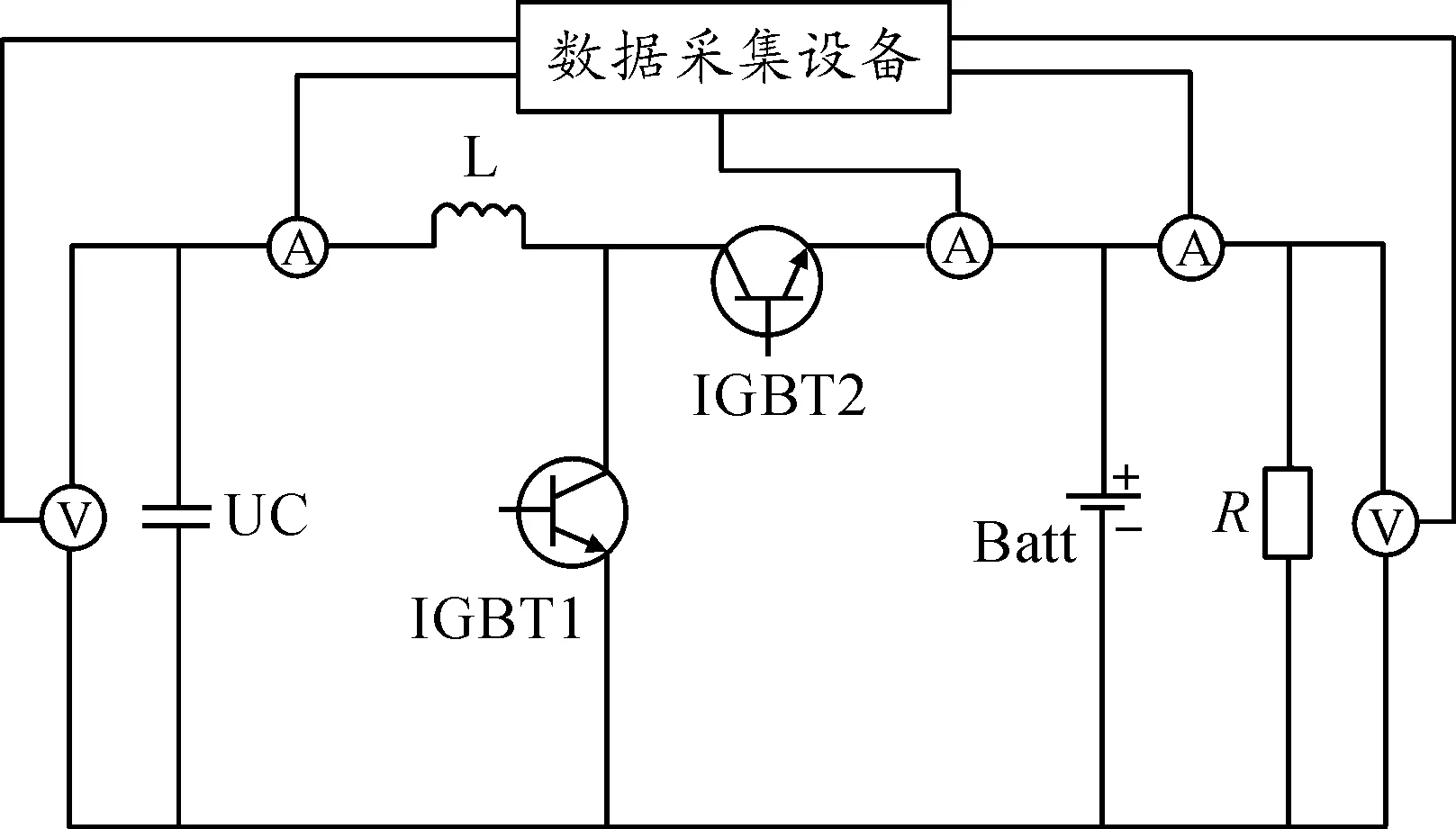
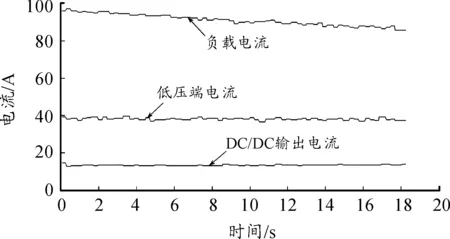
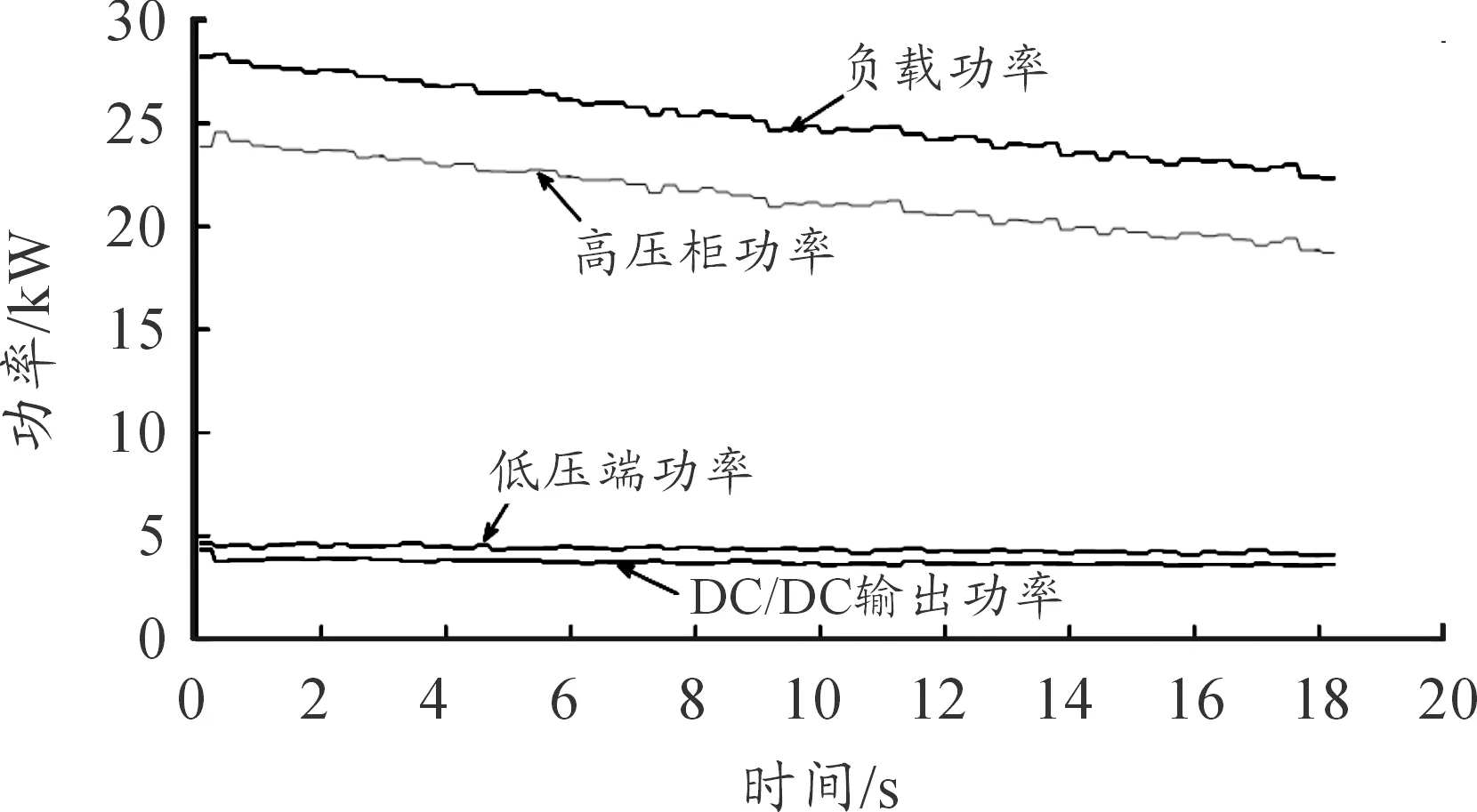
設車輛需求功率為Preq、蓄電池門限值為PBatl、蓄電池輸出功率為PBat、超級電容輸出功率為PUC。車輛加速行駛時,當Preq≤PBatl,若SOCUC PBat=PBatl=Preq+PUC (4) 當SOCUC>SOCmin l且上一時刻超級電容未處于充電狀態(tài)時,蓄電池輸出功率等于車輛需求功率: PBat=Preq (5) PUC=0 (6) 當Preq>PBatl時,若SOCUC>0.5,車輛需求功率等于蓄電池最大輸出功率與超級電容輸出功率之和: Preq=PBatl+PUC (7) 若SOCUC≤0.5,超級電容存儲能量僅剩余25%,超級電容可視為能量耗盡,此時為滿足車輛功率需求,車輛需求功率完全由蓄電池提供,該工作情況下蓄電池工作負荷大,在復合電源系統(tǒng)中應盡量避免。 根據(jù)復合電源系統(tǒng)設計要求,再生制動能量完全由超級電容回收,蓄電池不參與再生制動回收過程。當車輛制動時,超級電容充電,為保護超級電容,避免其出現(xiàn)過充現(xiàn)象,設定超級電容SOCUC最大值為0.99。當SOCUC<0.99時,超級電容回收能量為: PUC=Prep (8) PBat=0 (9) 當超級電容SOC充電至0.99后,為保證制動效能,電機回饋能量由剎車電阻R消耗: PR=Preq (10) PBat=0 (11) 為了驗證控制策略的有效性,在Matlab/Simulink環(huán)境下建立控制策略模型。同時選用原型車路試工況和美國城市動態(tài)驅(qū)動(UDDS)工況作為測試工況進行供能仿真,如圖2、3所示。UDDS被廣泛使用在電動汽車的性能測試中,包括車輛的啟動、加減速和制動工況,具有很強的代表性[19-20]。仿真參數(shù)見表1。 圖2 路試工況 圖3 UDDS工況 參數(shù)參數(shù)值參數(shù)參數(shù)值外形尺寸(長×寬×高)/mm3569×1551×1540電池額定電壓/V300整備質(zhì)量/kg1080電池容量/Ah·(kW·h)-160/18滿載質(zhì)量/kg1380充電時間/h8慢充/0.5快充風阻系數(shù)0.6電機類型永磁同步電機車輪半徑/m0.27電機額定/峰值功率/kW28/52最高車速/(km·h-1)130電機額定/峰值轉(zhuǎn)速/(r·min-1)3000/800060km/h等速行駛里程/km170電機最大扭矩/(N·m)1550~50km/h加速時間/s5.3電機工作電壓范圍/V250~345電池類型鎳鈷錳酸鋰主減速比6.26滾動阻力系數(shù)f0.02機械傳動效率η0.9 復合電源系統(tǒng)模型如圖4所示,該模型主要包括DC/DC Converter模塊、Power模塊、UC_R模塊、功率分配控制模塊Distribute strategy以及Power table和Speed table查表模塊。Power模塊主要由2個蓄電池模塊Battery_q和Battery_b組成。Battery_q模塊在車輛需要復合電源系統(tǒng)供能時起作用,是復合電源系統(tǒng)的主要動力源。模擬車輛動力電池Battery_b模塊在車輛減速、制動時起作用,是再生制動及能耗制動時的能量源。模擬電機在減速或制動時作為發(fā)電機供電,Battery_q模塊和Battery_b模塊不能同時起作用。UC_R模塊主要包括超級電容模塊UC和剎車電阻R,在復合電源供能及再生制動過程中超級電容模塊UC起作用。當車輛工作于再生制動狀態(tài)且超級電容SOCUC大于其限值時,剎車電阻R起作用,車輛工作在能耗制動狀態(tài)。Power table和Speed table查表模塊分別具有車輛需求功率和車速的查表功能。 圖4 復合電源系統(tǒng)模型 圖5是復合電源功率分配策略模型,根據(jù)車輛需求功率Preq判斷車輛工作在驅(qū)動模式或制動模式,并進行相應控制。當Preq≥0時,車輛工作在驅(qū)動模式,復合電源功率分配策略根據(jù)車輛需求功率、蓄電池功率輸出限值、蓄電池SOC最低限值、超級電容SOCUC及其上、下限值進行邏輯判斷,對車輛在驅(qū)動行駛時各種工作模式進行控制,包括蓄電池單獨驅(qū)動模式、超級電容-蓄電池復合驅(qū)動模式以及蓄電池對超級電容預充模式,其中超級電容SOCUC上、下限值由SOC_limit模塊根據(jù)式(2)和式(3)計算;當Preq<0時,車輛工作在制動模式,復合電源功率分配策略根據(jù)超級電容SOCUC最高限值進行邏輯判斷,確定車輛是工作在再生制動模式還是能耗制動模式。 圖5 復合電源功率分配策略模型 原型車由蓄電池單獨供電。由圖6可知:在路試工況下,蓄電池輸出電流超過60 A,且再生制動電流超過20 A;當復合電源系統(tǒng)以原型車功率需求供能時,由于超級電容的介入,蓄電池供電電流明顯下降,在整個行駛過程中,蓄電池最大供電電流不到20 A,蓄電池供電電流下降了70%,且不回收再生制動能量,避免了較大電流對蓄電池的沖擊。 圖7是超級電容和蓄電池在供能過程中的功率輸出曲線。由圖7可知:當車輛有大功率需求時,超級電容補償蓄電池功率需求,削去蓄電池功率輸出峰值,使蓄電池以功率限值輸出,在再生制動過程中超級電容吸收所有回饋能量。由于雙向DC/DC變換器電感的作用,超級電容輸出功率有一定的遲滯,故車輛在瞬時大功率需求時,蓄電池輸出功率會出現(xiàn)短時較大功率輸出,但不超過7 kW,超級電容對蓄電池起到了很好的輔助作用。 圖6 蓄電池供電電流曲線 圖7 超級電容和蓄電池功率輸出曲線 圖8是超級電容SOCUC曲線,由于車輛需求功率大于蓄電池功率輸出限值的機率不大,因此超級電容SOCUC在整個行駛工況下保持較高水平,始終具有足夠的供能能力,但超級電容SOCUC受其最大限值的制約,大部分再生制動能量由剎車電阻耗散,影響再生制動能量的回饋效率。 圖8 超級電容SOCUC及其上、下限值曲線 圖9、10是復合電源在功率分配策略下的仿真結(jié)果。圖9是超級電容及蓄電池功率輸出曲線,由圖9可知:在整個UDDS工況下,除了因電感作用導致超級電容輸出功率出現(xiàn)遲滯的影響外,當車輛有大功率需求時,蓄電池輸出功率均維持在邏輯門限值附近,超級電容補償所有車輛大功率需求。 圖10是超級電容SOCUC及其上、下限值曲線,由圖10可知:在仿真開始時,超級電容SOCUC大于其下限值時,超級電容不再充電;當超級電容SOCUC小于其下限值且車輛需求功率小于蓄電池功率限值時,蓄電池對超級電容進行預充電直到超級電容SOCUC達到其上限值;超級電容SOCUC最低值為0.5,為其最低限值,當超級電容SOCUC下降到最低限值后不再輸出功率。在整個UDDS循環(huán)工況下,超級電容SOCUC始終處于其上、下限值之間或附近,且具有向其上、下限值所圍區(qū)域聚攏的趨勢,車輛再生制動能量全部由超級電容吸收。在循環(huán)工況結(jié)束時,超級電容SOCUC再次上升至其上限值,可保證車輛在下一循環(huán)工況開始后超級電容具有足夠的能量輔助蓄電池為車輛供能并保護蓄電池。 圖9 超級電容及蓄電池輸出功率 圖10 超級電容SOCUC及其上、下限值曲線 根據(jù)本文所采用的復合電源結(jié)構(gòu)搭建復合電源系統(tǒng)試驗臺架,采用電阻代替電機進行復合電源系統(tǒng)的性能試驗,其試驗裝置原理及所測參數(shù)如圖11所示。試驗系統(tǒng)采集參數(shù)有超級電容端電壓、超級電容輸出電流、DC/DC高壓端(負載端)輸出電流、負載電流及負載電壓。 根據(jù)復合電源系統(tǒng)試驗裝置原理搭建的復合電源系統(tǒng)試驗平臺如圖12所示,試驗平臺主要包括超級電容、雙向DC/DC變換器、蓄電池、負載、數(shù)據(jù)采集設備及上位機控制,其中雙向DC/DC變換器低壓端由超級電容組串聯(lián)構(gòu)成超級電容裝置,雙向DC/DC變換器高壓端蓄電池裝置由高壓電容組模擬,電流參數(shù)由分流器測量,電壓參數(shù)經(jīng)電阻分壓后測量。為保護高、低壓電容組,避免其出現(xiàn)過充現(xiàn)象,試驗臺架所用高低壓電容組總電壓均高于超級電容裝置及蓄電池額定電壓。 4.2.1驅(qū)動工況供能試驗 低壓電容組通過雙向DC/DC變換器與高壓電容組并聯(lián)構(gòu)成復合電源為負載供能,負載電阻為3 Ω,圖13為電流曲線,圖14為電壓曲線,圖15為功率曲線。由圖13~15可以看出:在復合電源供能期間,低壓電容組輸出電流始終保持在40 A附近,持續(xù)供能時間能達到18 s以上;隨著能量消耗,低壓電容組和高壓電容組端電壓逐漸下降,說明超級電容輔助蓄電池供能;超級電容輸出功率占負載功率接近20%,具有足夠的功率輸出能力;當負載需求功率下降時,高壓柜功率和低壓端功率隨之下降,說明功率分配策略具有很好的響應。 圖11 試驗裝置原理及所測參數(shù) 4.2.2制動工況回收試驗 高壓電容組通過雙向DC/DC變換器對低壓電容組充電,圖16為電流曲線,圖17為電壓曲線,圖18為功率曲線。由圖16~18可以看出:低壓電容組電壓隨著充電時間增加,其端電壓逐漸延長,說明制動時超級電容吸收制動回饋能量;因為低壓端回收電流保持不變,所以低壓端功率逐漸增加,同時高壓端和低壓端功率差別不是很大,說明DC/DC具有很高的效率。 圖13 驅(qū)動時電流變化曲線 圖15 驅(qū)動時功率變化曲線 圖17 制動時電壓變化曲線 1) 超級電容對蓄電池的輸出功率幅值進行了有效的抑制,在制動時,超級電容回收能量,降低了大電流充電對蓄電池的沖擊,回收電阻也防止了超級電容過充,有效地保護了超級電容。整體而言,超級電容在復合電源系統(tǒng)中起到了輔助蓄電池的作用,延長了蓄電池的使用壽命。 2) 仿真結(jié)果很好地驗證了復合電源系統(tǒng)的優(yōu)勢所在,試驗結(jié)果也證明了該功率分配策略是可行和有效的。 參考文獻: [1]CAO J,EMADI A.A new battery/ultracapacitor hybrid energy storage system for electric,hybrid,and plug-in hybrid electric vehicles[J].IEEE Transactions on Power Electron,2012,7(1):122-132. [2]CAO Jianbo,CAO Binggang.Neural network sliding mode control based on on-line identification for electric vehicle with ultracapacitor-battery hybrid power[J].International Journal of Control,Automation,and Systems,2009,7(3):409-418. [3]殷國棟,金賢建,張云.分布式驅(qū)動電動汽車底盤動力學控制研究綜述[J].重慶理工大學學報(自然科學),2016,30(8):13-19. [4]李飛強,柴結(jié)實,王宗田,等.燃料電池-動力電池電電混合動力客車的仿真分析[J].客車技術(shù)與研究,2017,39(3):1-4. [5]陳燎,程云峰,盤朝奉.具備能量回收功能的電動汽車續(xù)駛里程研究[J].重慶理工大學學報(自然科學),2016,30(8):27-30. [6]王禺寒.考慮循環(huán)工況的純電動汽車動力傳動系統(tǒng)參數(shù)匹配[D].重慶:重慶大學,2013. [7]王慶年,于永濤,曾小華,等.基于CRUISE 軟件的混合動力汽車正向仿真平臺的開發(fā)[J].吉林大學學報(理學版),2009,39(6):1413-1419. [8]劉振軍,趙海峰,秦大同.基于CRUISE的動力傳動系統(tǒng)建模與仿真分析[J]. 重慶大學學報(自然科學版),2005,28(11):8-11. [9]岳鳳來,張俊紅,周能輝.基于CRUISE的純電動轎車性能仿真與試驗研究[J]. 汽車工程,2014,36(6):669-672. [10] 張炳力,趙韓,張翔,等.超級電容在混合動力電動汽車中的應用[J].汽車工程學報,2003(5):48-50. [11] HUANG X,HIRAMATSU T,YOICHI H.Energy Management Strategy based on frequency-varying filter for the battery supercapacitor hybrid system of Electric Vehicles[C]//Electric Vehicle Symposium and Exhibition.USA:IEEE,2013:1-6. [12] 羅玉濤,劉秀田,梁偉強,等.延長鋰離子電池壽命的電動汽車復合電源設計[J].華南理工大學學報(自然科學版),2016,44(3):51-59. [13] 董昊龍,馮能蓮,賓洋.純電動車輛復合能源系統(tǒng)架構(gòu)及控制策略研究[C]//Proceedings of the 31st Chinese Control Conference.USA:IEEE,2012:6872-6877. [14] 衣紅明,馬鳳英.電動汽車復合電源系統(tǒng)仿真研究[J].電源世界,2013(1):30-33. [15] WANG Guiping,YANG Panpan,ZHANG Jinjin.Fuzzy optimal control and simulation of battery-ultracapacitor dual-energy source storage system for pure electrivehicle[C]//International Conference on Intelligent Control and Information Processing.Dalian:Dalian University of Technology,2010:555-560. [16] OZATAY E,ZILE B,ANSTROM J,et al.Power distribution control coordinating ultracapacitors and batteries for electric vehicles[C]//Proceedings of the American Control Conference,2004.USA:IEEE,2004:4716-4721. [17] YOO H,SUL S K,PARK Y,et al.System Integration and Power-Flow Management for a Series Hybrid Electric Vehicle Using Supercapacitors and Batteries[J].IEEE Transactions on Industry Applications,2008,44(1):108-114. [18] JARUSHI A M,SCHOFIELD N.Battery and supercapacitor combination for a series hybrid electric vehicle[C]//Iet International Conference on Power Electronics,Machines and Drives.UK:IET,2010:1-6. [19] 雷肖,陳清泉,劉開培,等.電動車蓄電池荷電狀態(tài)估計的神經(jīng)網(wǎng)絡方法[J].電工技術(shù)學報,2007,22(8):155-160. [20] 雷肖,陳清泉,劉開培,等.電動車電池SOC估計的徑向基函數(shù)神經(jīng)網(wǎng)絡方法[J].電工技術(shù)學報,2008,23(5):81-87.2.3 復合電源工作在制動模式
3 仿真驗證
3.1 復合電源系統(tǒng)建模
3.2 基于原型車路試工況的復合電源系統(tǒng)供能仿真
3.3 基于UDDS工況的復合電源系統(tǒng)供能仿真

4 試驗驗證
4.1 試驗平臺搭建
4.2 試驗結(jié)果分析

5 結(jié)論
猜你喜歡
艦船科學技術(shù)(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:37
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(shù)(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36
