一種開關磁阻電動機瞬時轉矩在線估算方法
2018-04-26 13:11:01陳海進李錦陽
微特電機 2018年3期
關鍵詞:測量
陳海進,李錦陽
(南通大學,南通 226019)
0 引 言
開關磁阻電動機(以下簡稱SRM)具有結構簡單、價格低廉、調速范圍廣、可靠性高等一系列優點,在工業應用中越來越受到青睞。但由于其工作磁路飽和、磁滯效應和渦流等因素產生的非線性特性,很難對其進行精確而快速的建模[1],從而很難獲得精確的磁鏈和轉矩等參數。然而瞬時轉矩大小的獲取對SRM瞬時轉矩控制及轉矩脈動的抑制等具有重要作用,因此有必要對轉矩測量估算技術進行研究。文獻[2]搭建了SRM轉矩測試系統實驗平臺,使用扭矩傳感器直接測量轉矩,這種方法雖直接方便,但扭矩傳感器既復雜昂貴又增大了系統的體積。文獻[3-4]分別使用BP神經網絡和模糊神經網絡對SRM的轉矩特性建模,以獲得轉矩與相電流及位置角之間的映射關系,之后通過測量相電流和位置角獲取瞬態轉矩。神經網絡建模雖具有較強的魯棒性和自適應性,但對處理器要求較高。其次,文獻[3]的訓練樣本使用的是MATLAB中的SRM電機模型,實用性不足。文獻[4]的訓練樣本通過實測電機的靜態轉矩特性獲得,此過程除了需要扭矩傳感器,還需要位置傳感器和轉子夾緊裝置來將轉子固定在特定位置,不僅耗費額外空間,增加了系統復雜度,而且在轉矩較大時夾緊裝置很難保持轉子絕對靜止。文獻[5]通過函數擬合法來表示轉矩與相電流及位置角的關系,將測量到的相電流與位置角信號輸入PC機計算出瞬時轉矩,該文將某相轉矩近似地表示為磁鏈對位置角的偏導數與電流的乘積,此處會具有相當的誤差;其次實時測量時需要PC機進行計算,相對于以微控制器為核心的控制系統,系統體積和成本大大提高。
本文提出了一種基于微控制器的瞬時轉矩在線估算方法,無需轉子夾緊裝置和位置傳感器即可獲取電機的轉矩特性,電機運轉時通過測量相電流和位置角估算瞬時轉矩。
1 技術方案
1.1 轉矩估算原理
該方法是通過實時測量每一相的電流和位置角,然后根據轉矩特性表使用雙線性插值法計算得到一相轉矩,將所有相的瞬時轉矩相加即得到該時刻電機的合成轉矩。以實驗所用的三相12/8 SRM為例,測量方法如圖1所示。
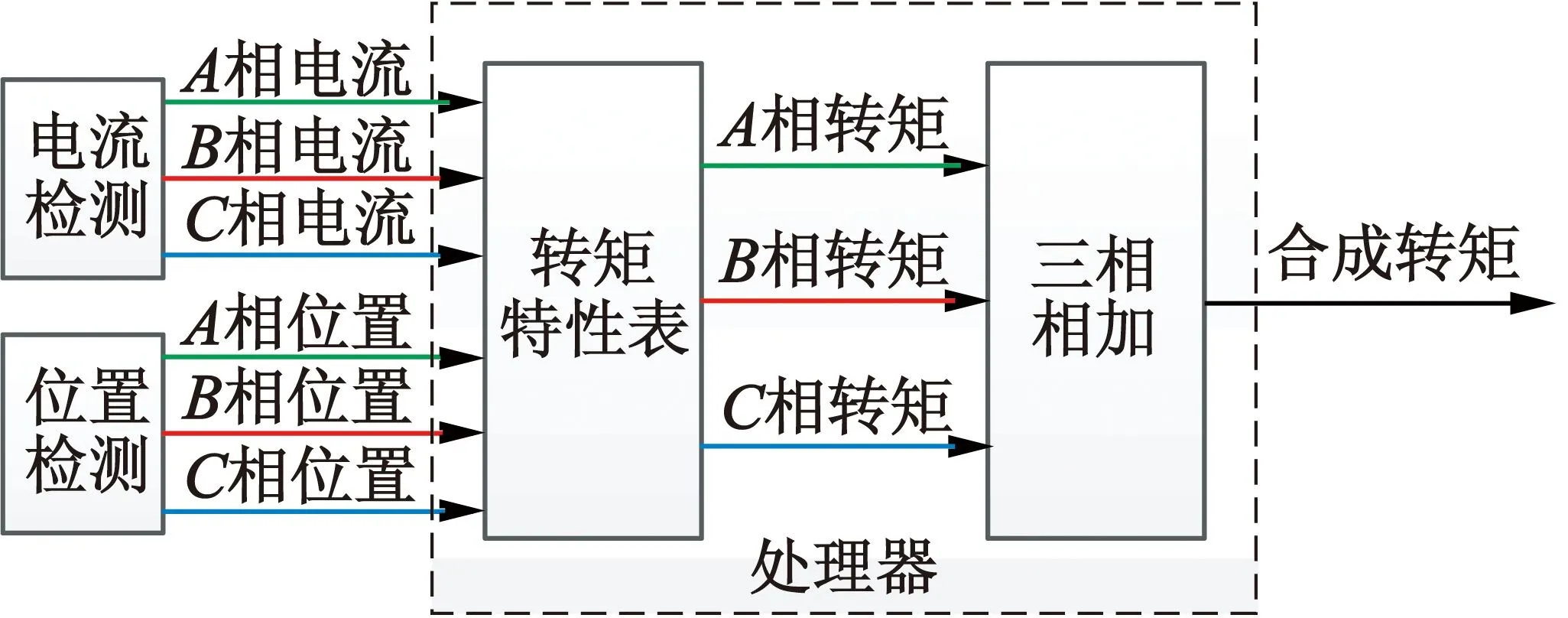
圖1 轉矩測量方法示意圖
由圖1可知,轉矩特性表是估算三相轉矩的前提,因此需先獲取轉矩特性。
1.2 轉矩特性的獲取
1.2.1 原理
電機的轉矩特性可由磁鏈特性計算得到,因此在不使用扭矩傳感器時需先獲取磁鏈特性。不考慮互感、渦流和磁滯效應的影響,處于某個位置θ*的一相繞組磁鏈可以由下式計算得到:

(1)
式中:t*和i*分別是對應位置角為θ*的時刻和相電流;u(t)和i(t)分別是該相t時刻的電壓和電流;ψ(0)是0時刻的磁鏈值,由于0時刻無電流而為0;R是該相繞組電阻。R會隨溫度而變化,實驗時需要在線測量,使用如下算法:
(2)
式中:tc是一個電氣周期內電流歸零的時刻。為了用采樣得到的電壓電流數據計算磁鏈,式(1)可以根據梯形積分公式改寫為離散形式[6]:
R[i(p)+i(p-1)]}+ψ(0)
(3)
式中:Δt為采樣間隔,索引p對應時間t*且索引0對應0時刻。根據式(3)即可求得某個位置θ*的磁鏈。
由磁阻最小原理可知,當定子某相繞組通電時,所產生的的磁場由于磁力線扭曲而產生切向磁拉力,試圖使相近的轉子旋轉至其軸線與該定子軸線對齊的位置,即磁阻最小位置。因此根據各相對稱的特點,通過給不同相通電,可以使三相12/8電機一相轉子分別穩定在4個不同位置,施加電壓激勵從而測得4條電壓電流離散曲線。由式(3),可將其轉換為磁鏈-電流離散曲線。再對離散曲線進行插值計算,即可獲得4個位置下測量范圍內任意電流值對應的磁鏈值。由于磁鏈與位置角的關系是一個周期性的波形,因此可以用傅里葉級數來表示。文獻[7]使用三階傅里葉級數來表示磁鏈與位置角的關系,而實驗所用三相12/8電機可以獲得4個位置下的磁鏈特性曲線,因此可以提高精度,使用四階傅里葉級數表示電流為i*時任意位置的磁鏈:
ψ(i*,θ)=ψ0(i*)+ψ1(i*)cos(Nθ)+
ψ2(i*)cos(2Nθ)+ψ3(i*)cos(4Nθ)
(4)
式中:N代表電機的轉子極數;ψk(i*)是電流為i*時傅里葉級數的系數。由4條磁鏈曲線可以列出4個方程:
(5)
傅里葉級數的系數可以由下式算出:
(6)
系數算出后便可由式(4)求得電流為i*時任意位置對應的磁鏈。電流從0以一定步長遍歷到測量上限值,再通過插值的方法即可得到電機的完整磁鏈特性。
轉矩T可通過磁共能W對位置角θ的偏導數計算得出:
(7)
由式(7)即通過磁鏈特性得到轉矩特性。
1.2.2 實現
通過給不同相通電,三相12/8 SRM一相轉子可以穩定在4個位置,分別對應0°,7.5°,15°,22.5°(以不對齊位置為0°)。因此,為實現上述的方法,以測量C相為例,需執行如圖2所示的步驟。
圖2中,J表示為了使C相處于不同位置所需通電的相。當J為C時,轉子會旋轉至對齊位置,即22.5°位置;當J為BC時,根據各相對稱性,轉子會轉至B相對齊位置與C相對齊位置的中點處,相當于C相的15°位置;當J為B時,B相會最終處于對齊位置,相當于C相的7.5°;當J為AB時,轉子最終轉至0°位置。值得注意的是測量時施加電壓激勵的對象K。文獻[8]中,對電機三相同時通電以施加激勵,但三相同時通電互感較大,產生較大誤差。為使轉子位置保持穩定,同時各相之間的互感盡可能小,因此K的實際設定如圖2中所示。
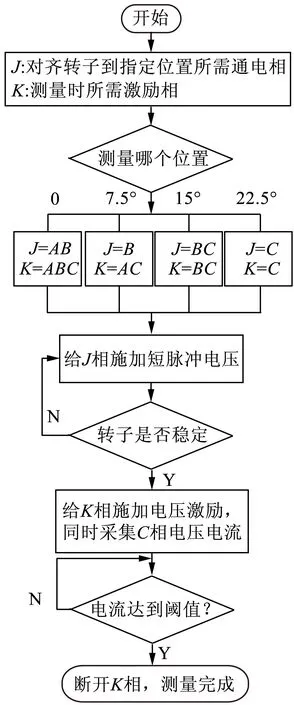
圖2 測量流程圖(以C相為例)
按照上述步驟測得4個位置的電壓電流曲線后,根據文中介紹的原理可算出轉矩特性。將轉矩特性轉換為二維查找表的形式(橫縱坐標分別對應電流,位置角,表格內為轉矩值)存儲于微控制器中,即完成了轉矩特性表的獲取。
1.3 轉矩的在線估算
電機運轉過程中模數轉換器(以下簡稱ADC)每采集一組相電流和位置角,控制器便根據轉矩特性表使用插值法計算得到對應的瞬時轉矩值。這里插值算法選擇了雙線性插值法,其相較于最臨近插值法擁有更高的精確度,在微控制器中的運算速度相比其它高次插值算法大幅提高。將插值得到的某時刻三相轉矩值相加即得到該時刻電機的合成轉矩,用微控制器中的數模轉換器(以下簡稱DAC)輸出即可通過示波器實時觀測轉矩波形。
2 實驗驗證
為了驗證上面的方案,搭建了實驗平臺。硬件部分包括SRM,微控制器,電流電壓檢測電路,位置傳感器,功率變換器,負載,直流穩壓源等。其中所采用的電機為三相12/8 SRM。控制器采用的是STM32F103R,其內嵌了適用于電機控制的定時器和ADC。電流電壓檢測電路中分別使用霍爾電流和霍爾電壓傳感器,可以將電流和電壓轉化到ADC的檢測范圍之內。功率變換器采用的是不對稱半橋結構。負載為磁粉制動器。
依照文中的步驟進行實驗,得到的4條磁鏈曲線如圖3所示。
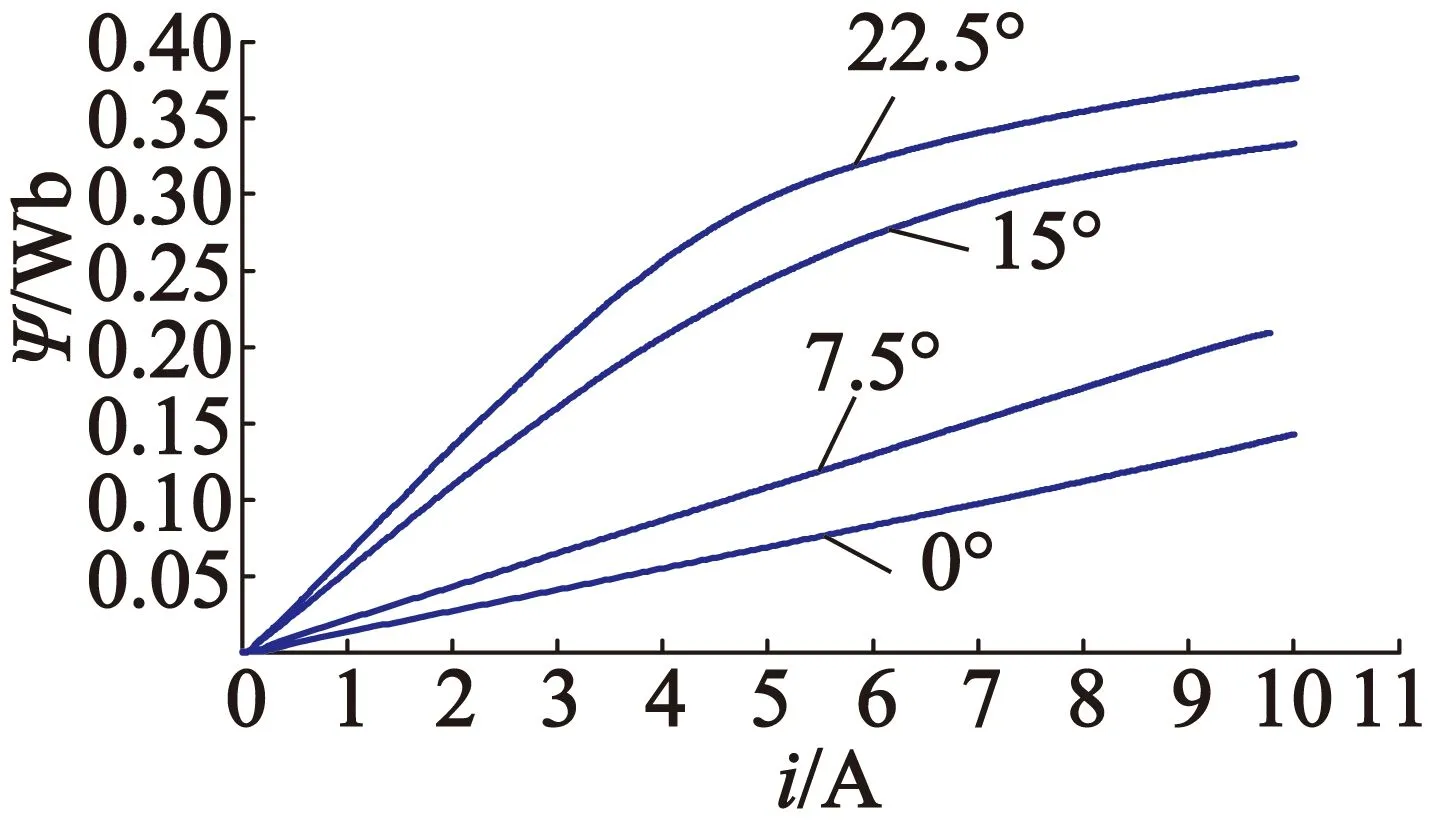
圖3 4個關鍵位置的磁鏈特性曲線圖
四階傅里葉級數表示的完整磁鏈特性曲線圖如圖4所示,其中每條曲線代表某個位置下磁鏈與電流的關系,圖中只列出了部分位置下的曲線。
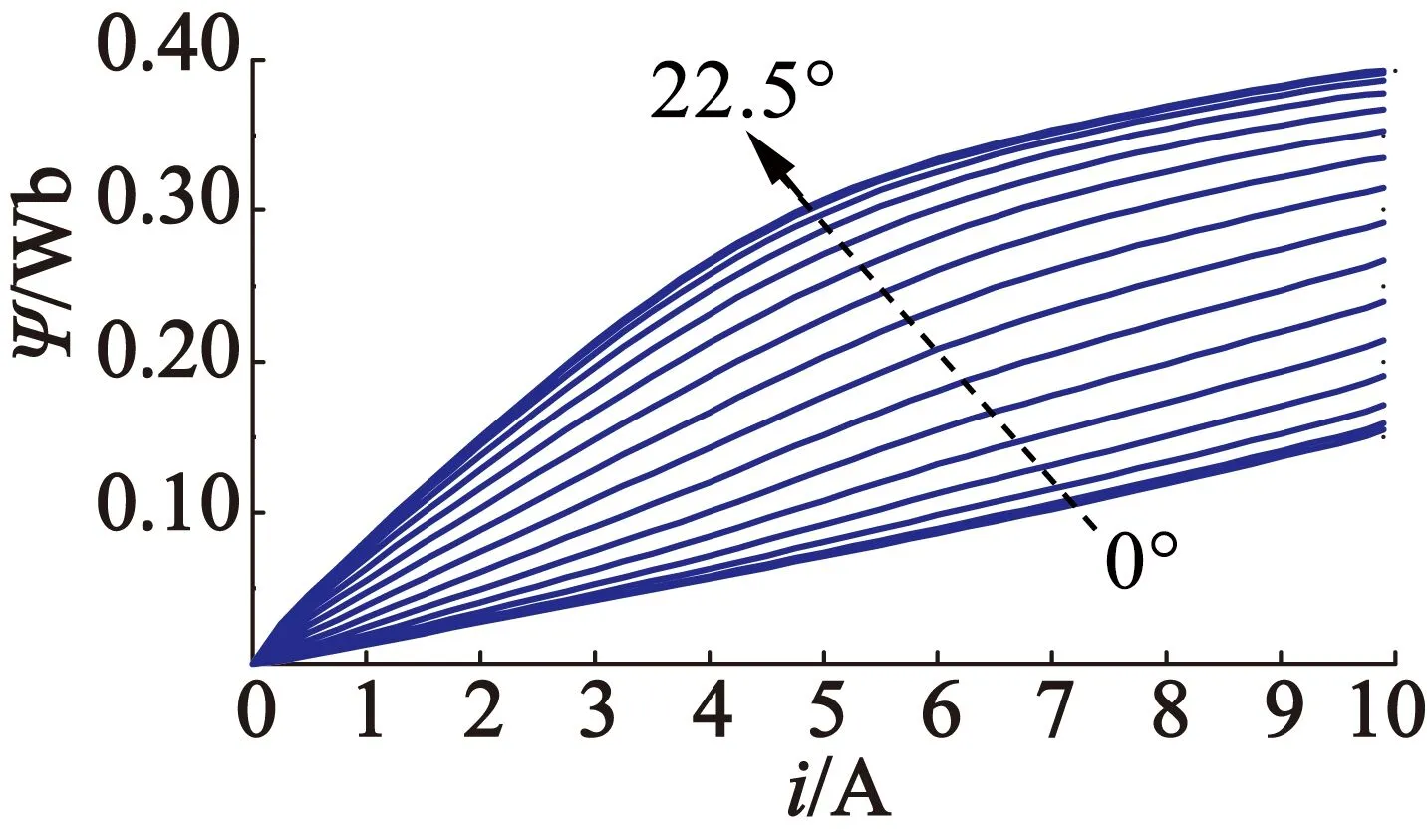
圖4 完整磁鏈特性曲線圖
轉矩特性如圖5所示,圖中只列出了部分電流值對應的轉矩與位置角的關系。
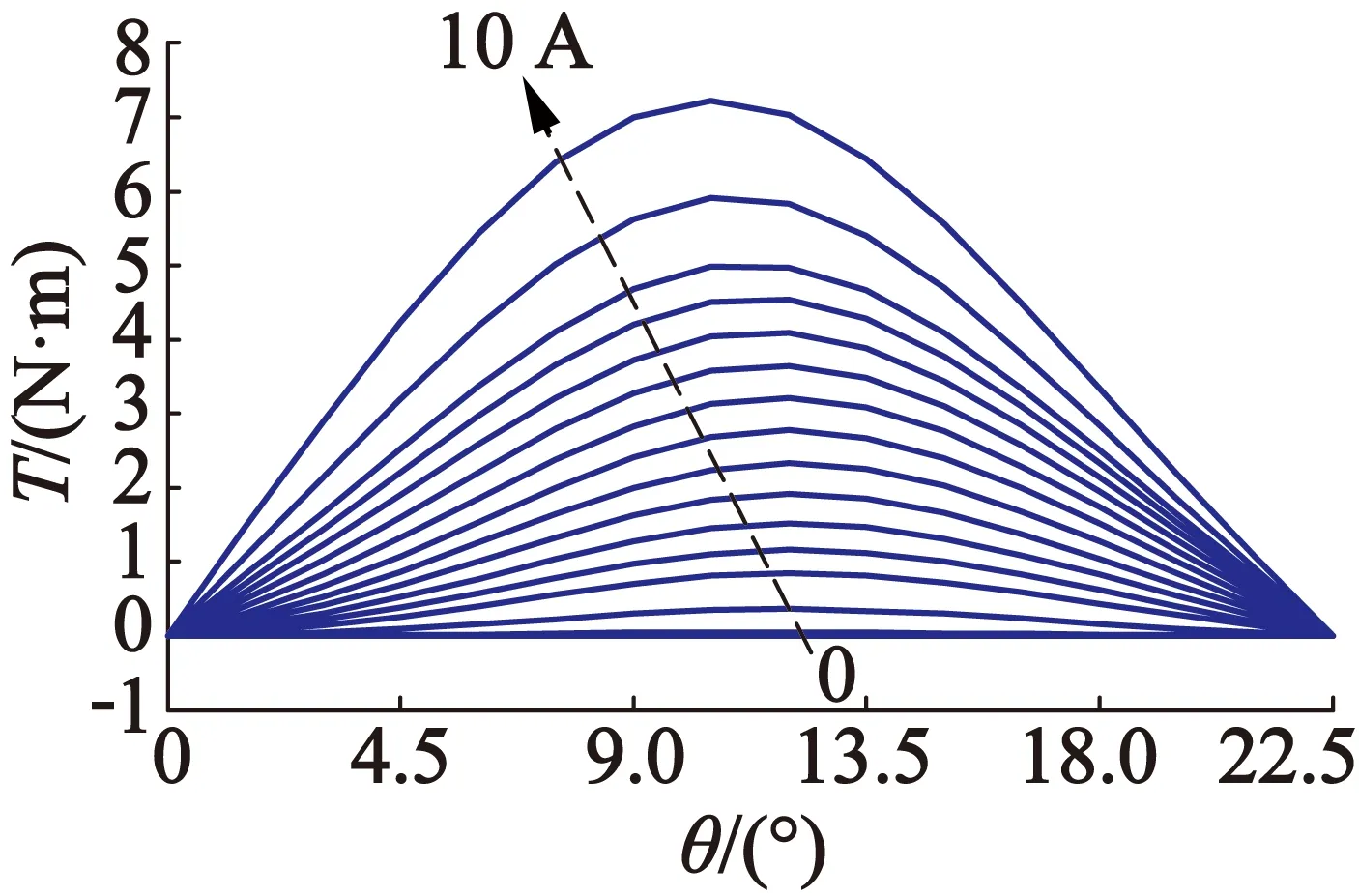
圖5 轉矩特性圖
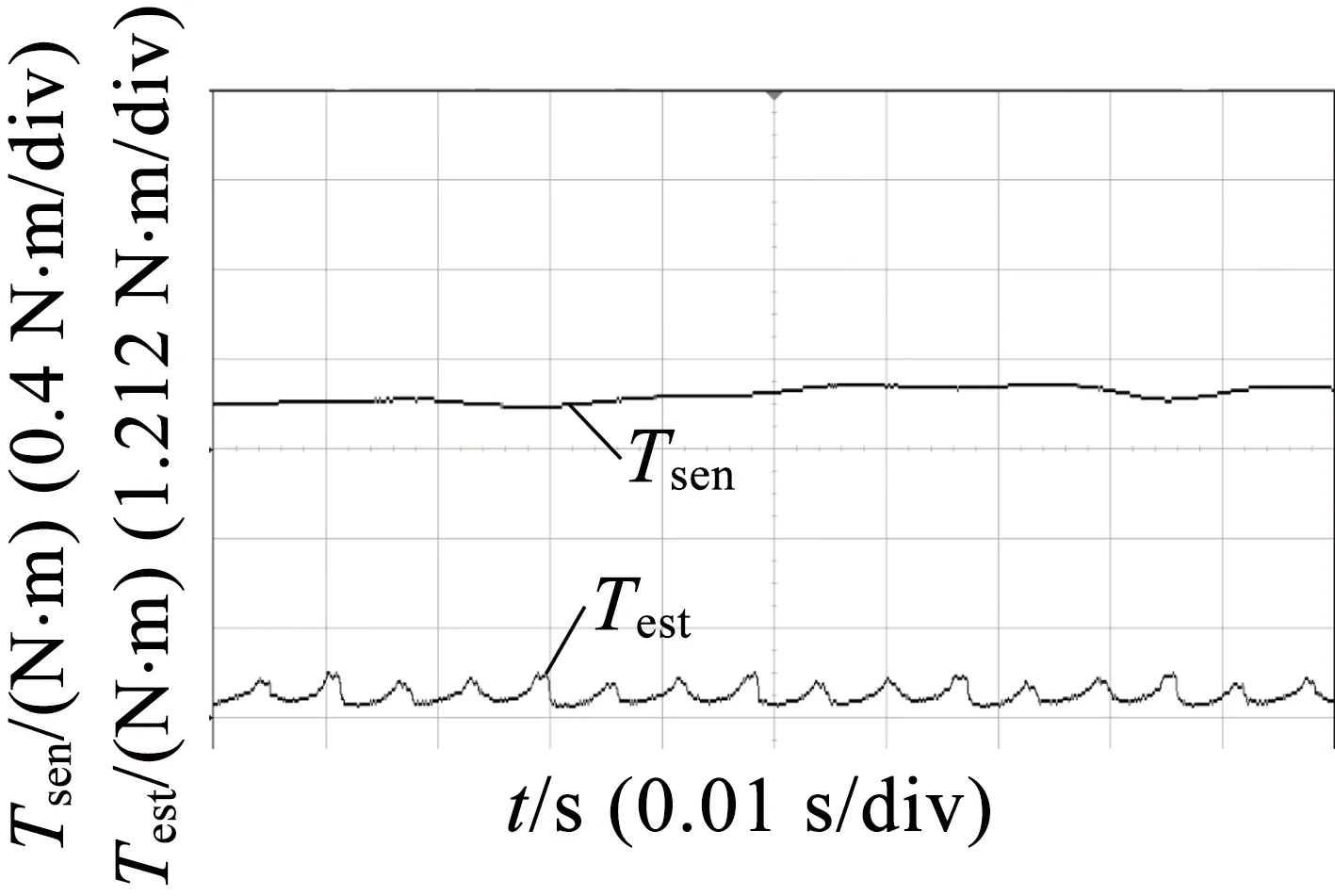
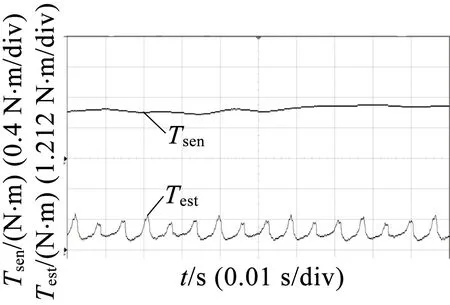
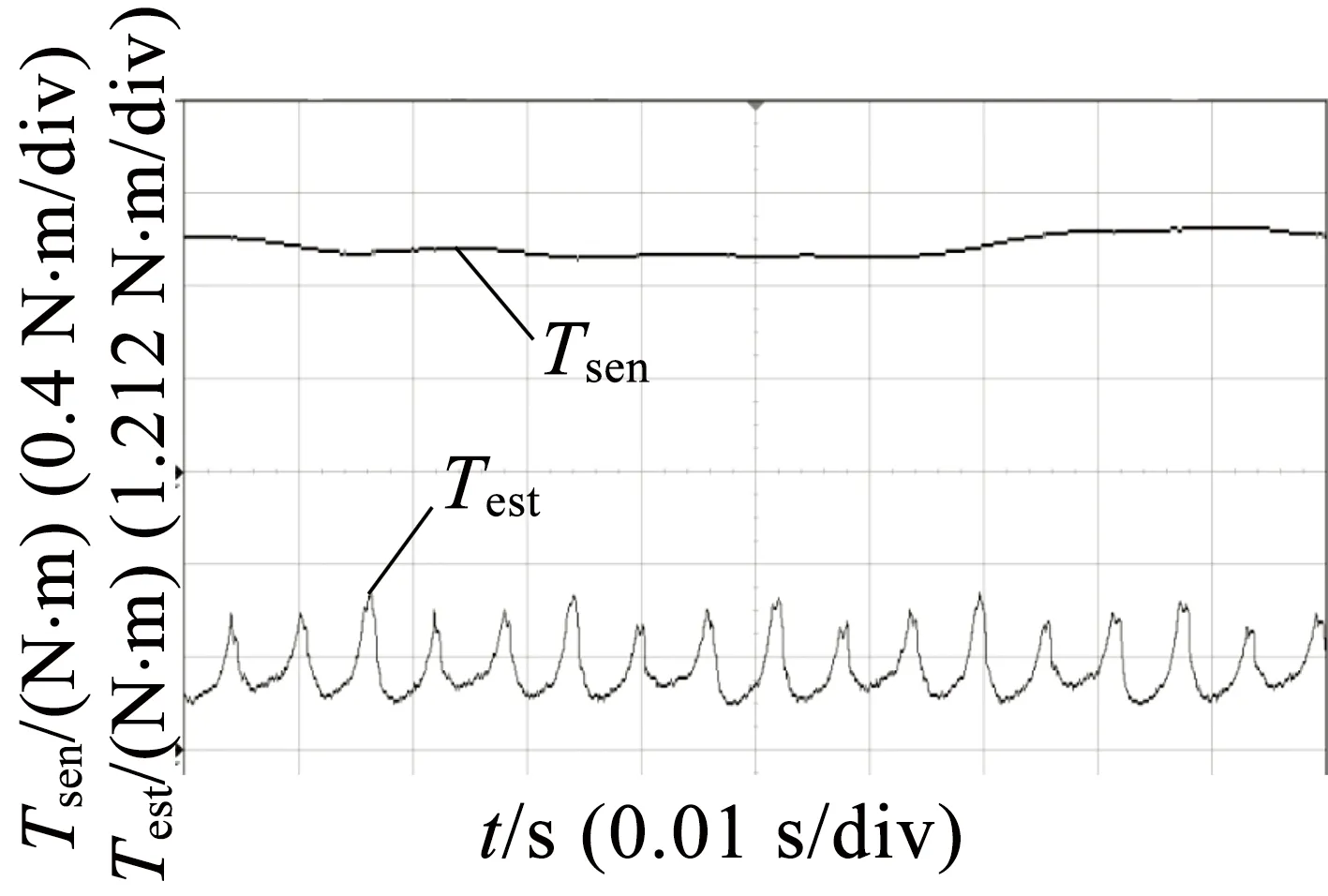
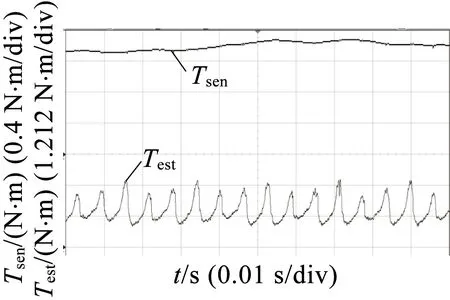
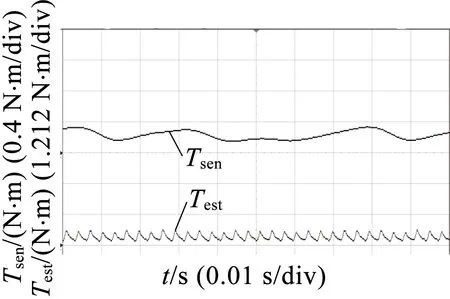
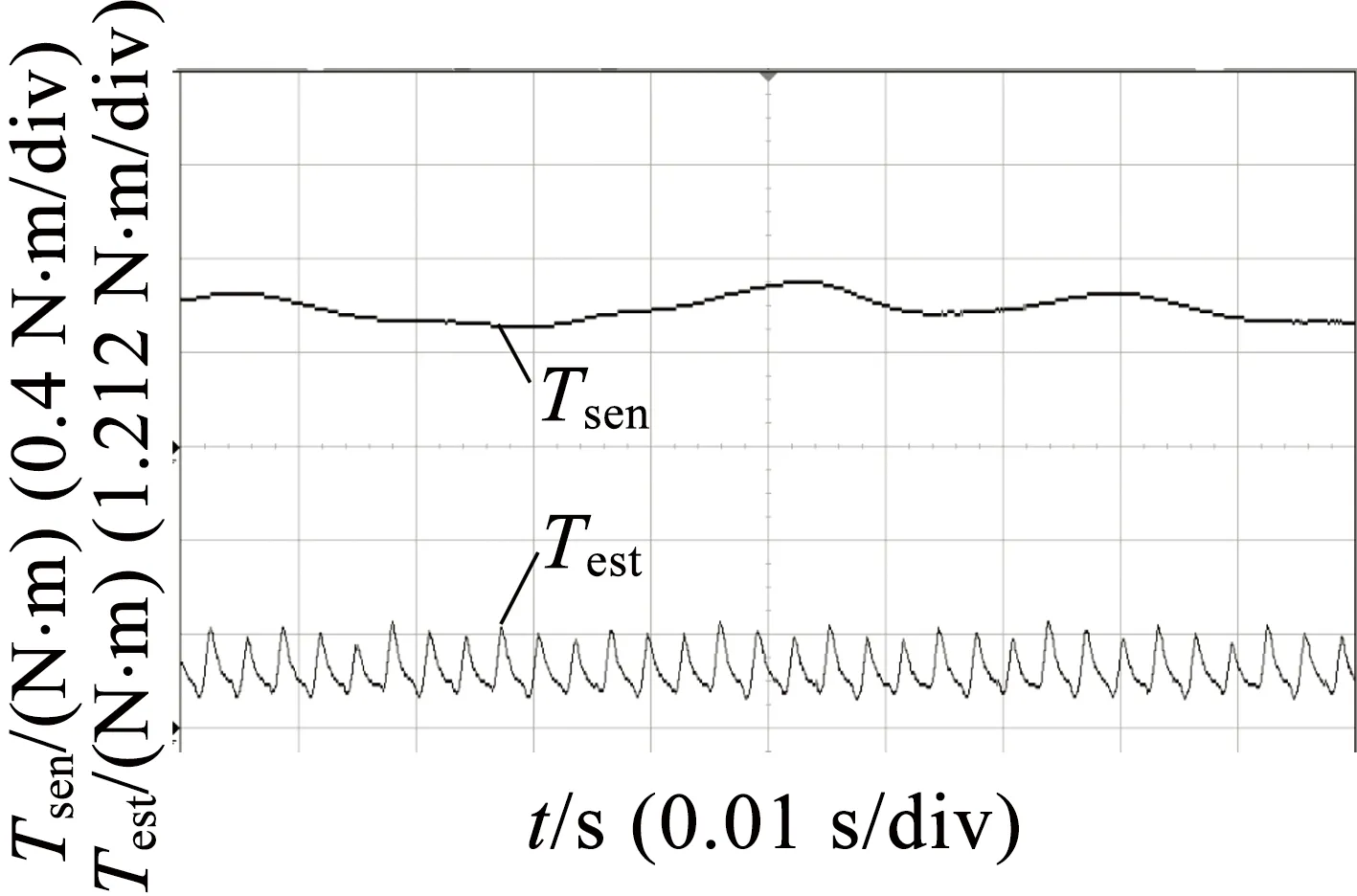
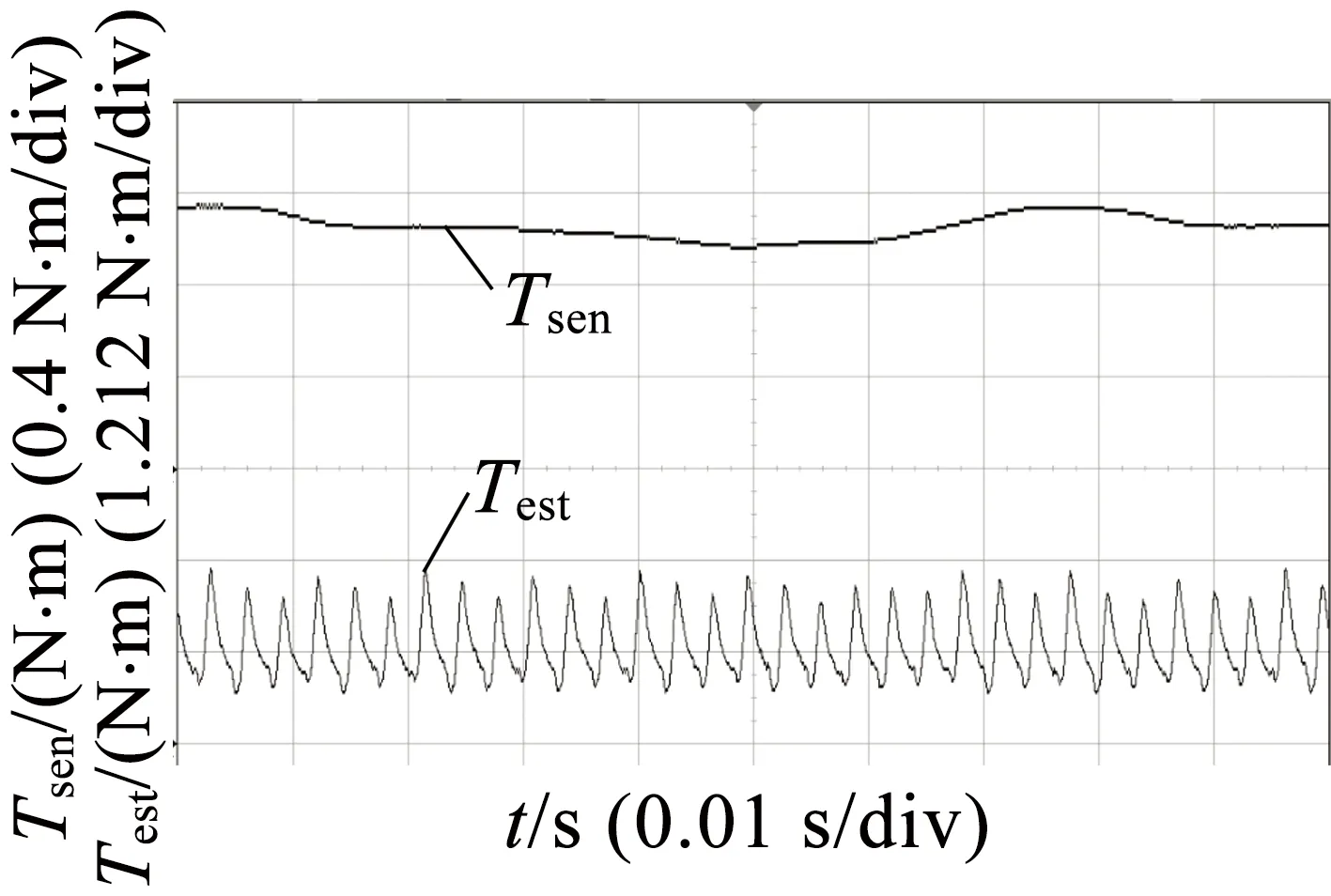
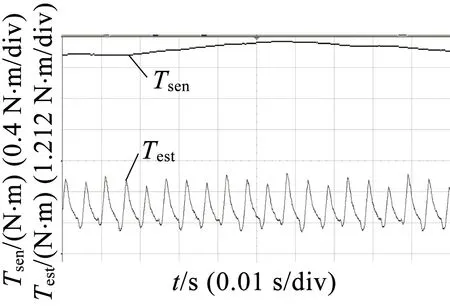
為了將在線估算結果Test和扭矩傳感器的測量結果Tsen進行對比,進行了多組實驗。圖6的控制方式為電流斬波控制,轉速400 r/min。圖7為角度位置控制,轉速800 r/min。圖6、圖7分別為不同負載下(從圖6(a)到圖6(d)負載遞增)下的測量結果。
(a)
(b)
(c)
(d)
圖6采用電流斬波控制,轉速400 r/min時,不同負載下的測量結果
(a)
(b)
(c)
(d)
圖7采用角度位置控制,轉速800 r/min時,不同負載下的測量結果
根據圖6和圖7,可得到對比結果如表1和表2所示。
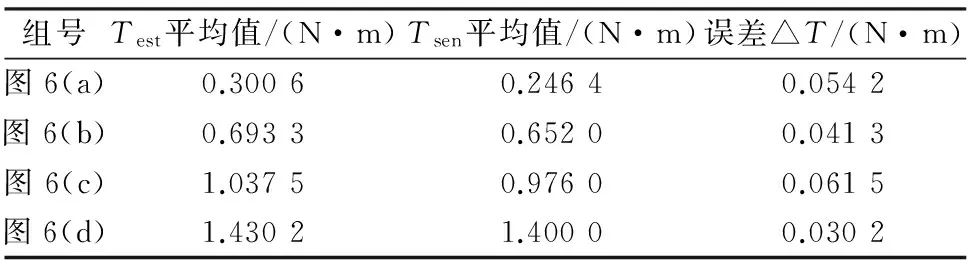
表1 電流斬波控制,轉速400 r/min時,4組測量數據對比
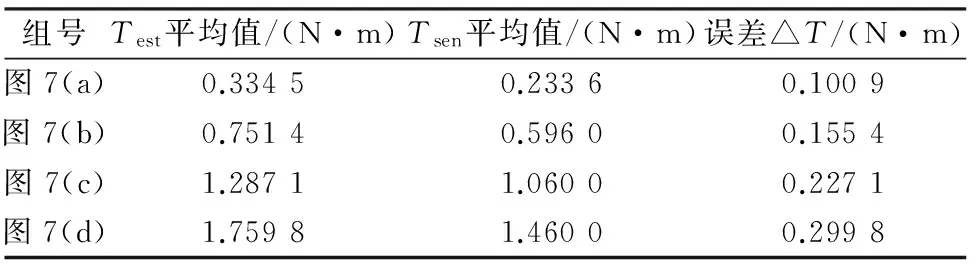
表2 角度位置控制,轉速800 r/min時,4組測量數據對比
從對比結果可以看出,轉矩估算的結果與扭矩傳感器的測量結果數值上基本吻合,驗證了方案的可行性。觀察誤差一欄可以發現,在角度位置控制下,高速運行時誤差相對較大,并且隨著負載的增大而增大。這可以從電機損耗的角度解釋,該方法估算得到的轉矩,由于未考慮損耗問題,可以視為輸入功率Pin對應的轉矩,而扭矩傳感器測得的轉矩則可視為電機軸上的功率Pshaft對應的轉矩。圖8為SRM損耗示意圖。由圖8可知,從輸入功率Pin到最終電機軸上的輸出功率Pshaft,共有鐵損、銅損、機械損耗和雜散損耗4種損耗。其中,銅損與電流有效值的平方成正比。鐵損除了與電機鐵心材料有關外,還與電機鐵心的磁場有密切關系。機械損耗一般由軸承摩擦損耗和通風損耗組成,主要與轉速、加工精度、潤滑脂及溫度、電機結構等有關。雜散損耗原因很復雜,一般可以按銅損、鐵損、機械損耗三者之和的7%計算[9]。綜上,可以得出電機在高速運轉時,銅損、機械損耗、雜散損耗相對低速運轉時會明顯增大,所以表2中誤差明顯大于表1。在轉速一定時,隨著負載的增大,銅損會隨著電流的增大而增大,因此表2中4組誤差遞增。而表1中由于誤差本身較小,因此4組誤差遞增關系不明顯。
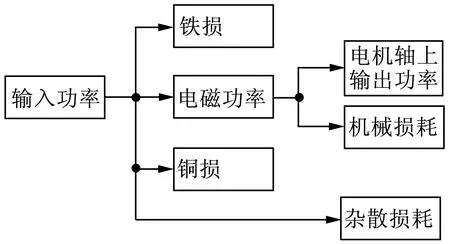
圖8 SRM損耗示意圖
3 結 語
本文介紹了一種SRM瞬時轉矩在線估算方法,它采用一種簡單快速的方法獲取電機轉矩特性,無需位置傳感器和轉子夾緊裝置。之后,通過測量相電流和轉子位置角,使用雙線性插值計算,得到瞬時轉矩。該方案的可行性得到了實驗驗證。實驗所用樣機為三相12/8 SRM,該方法在其它結構SRM上亦可使用。
[1] 吳紅星,孫青杰,黃玉平,等.開關磁阻電機非線性建模方法綜述[J].微電機,2014,47(5):83-92.
[2] 張劍.開關磁阻電機轉矩測試系統實驗平臺建立[D].邯鄲:河北工程大學,2015.
[3] 李大鵬,代尚芳.基于BP神經網絡的開關磁阻電機轉矩觀測器[J].伺服控制,2012(1):38-40.
[4] 鄭洪濤,李玉榕,喬斌,等.基于模糊神經網絡開關磁阻電動機轉矩觀測[J].儀器儀表學報,2002,23(4):351-360.
[5] 孫建忠,張凱,王詩琦,等.基于Labview的開關磁阻電機瞬態轉矩測試系統研究[J].大連理工大學學報,2013,53(3):443-446.
[6] CHEN H J,JING W P.Flux linkage determination of the switched reluctance motor from measurable quantities at steady-state operations[J].IET Electric Power Applications,2011,5(2):210-216.
[7] SALMASI F R,FAHIMI B.Modeling switched-reluctance machines by decomposition of double magnetic saliencies[J].IEEE Transactions on Magnetics,2004,40(3):1556-1561.
[8] SHEN L,WU J H,YANG S Y,et al.Fast flux linkage measurement for switched reluctance motors excluding rotor clamping devices and position sensors[J].IEEE Transactions on Instrumentation and Measurement,2013,62(1):185-191.
[9] 楊麗.開關磁阻電機的損耗及熱分析研究[D].南京:南京航空航天大學,2006.
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
