無刷直流電動機(jī)驅(qū)動控制方法研究
2018-04-26 13:11:20趙志芳
微特電機(jī) 2018年3期
趙志芳
(晉中職業(yè)技術(shù)學(xué)院,晉中 030600)
0 引 言
無刷直流電動機(jī)采用電力電子器件構(gòu)成的電子換相方式替代機(jī)械換相,因此可以有效提高電機(jī)使用壽命,減少運(yùn)行噪聲,并且具有控制簡單、調(diào)速性能好等優(yōu)點(diǎn)受到廣泛關(guān)注和重視。
傳統(tǒng)兩電平逆變器驅(qū)動無刷直流電動機(jī)的有位置傳感器控制方式,存在轉(zhuǎn)矩脈動大、對功率開關(guān)器件耐壓值要求較高等問題。本文提出采用中點(diǎn)鉗位型三電平逆變器來代替兩電平逆變器的方法,并推導(dǎo)出了一種新的基于線電壓差值的無位置傳感器控制算法,該方法可以有效提高檢測精度[1-2]。最后基于MATLAB軟件和TMS320F28335硬件控制器結(jié)構(gòu)進(jìn)行了仿真和實(shí)驗(yàn),結(jié)果證實(shí)了所述方法的正確性和有效性。
1 三電平逆變器驅(qū)動無刷直流電動機(jī)分析
采用三電平逆變器驅(qū)動無刷直流電動機(jī)的接線圖如圖1所示。

圖1 三電平逆變器驅(qū)動無刷直流電動機(jī)接線圖


表1 A相橋臂的開關(guān)狀態(tài)與輸出電壓關(guān)系
2 基于線電壓差值的無位置傳感器控制
無刷直流電動機(jī)無位置傳感器檢測技術(shù)可以降低電機(jī)結(jié)構(gòu)的復(fù)雜度和硬件成本,受到廣泛關(guān)注。本文在對無刷直流電動機(jī)無位置傳感器基于傳統(tǒng)反電動勢檢測分析的基礎(chǔ)上提出了線電壓差值檢測法[3]。
假設(shè)A,B相導(dǎo)通,C相關(guān)斷時,三電平逆變器驅(qū)動無刷直流電動機(jī)等效電路如圖2所示,可得無刷直流電機(jī)三相繞組端電壓表達(dá)式:

圖2 三電平逆變器驅(qū)動無刷直流電動機(jī)等效電路
(1)
式中:uAG,uBG,uCG為三相端電壓;UN為中性點(diǎn)電壓。
將式(1)兩兩相減得:
(2)
(3)
(4)
將式(2)、式(3)、式(4)兩兩相減得:
UAB-UBC=R(iA-2iB+iC)+
(5)
UBC-UCA=R(iB-2iC+iA)+
(6)
UCA-UAB=R(iC-2iA+iB)+
(7)
又有eA+eB+eC=0,iA+iB+iC=0,代入式(5)、式(6)、式(7)得:
(8)
(9)
(10)
C相懸空時,iC=0,由式(10)可得線電壓差值UCA-UBC只與反電動勢eC有關(guān),其過零點(diǎn)時刻也是反電動勢eC的過零點(diǎn)時刻。反電動勢與兩兩導(dǎo)通方式下功率管的導(dǎo)通規(guī)律[4]如圖3所示。圖3中VT1代表Qa1,Qa2導(dǎo)通;VT2代表Qc3,Qc4導(dǎo)通,VT3代表Qb1,Qb2導(dǎo)通;VT4代表Qa3,Qa4導(dǎo)通;VT5代表Qc1,Qc2導(dǎo)通;VT6代表Qb3,Qb4導(dǎo)通。由于線電壓差值是相電壓的2~4倍,因此可以有效提高檢測的精度,其MATLAB仿真分壓濾波檢測電路如圖4所示。

圖3 反電動勢波形與功率管通斷波形關(guān)系

圖4 分壓濾波和線電壓輸出電路
由圖4可見,由于電容濾波的原因,檢測到的線電壓差值會產(chǎn)生延遲。如果延遲電角度α超過30°,上面介紹的方法將出現(xiàn)較大誤差。因此,本文在線電壓經(jīng)過圖4的電路濾波延遲α電角度后再延遲90°-α的電角度,得到的線電壓的差值與反電動勢的波形關(guān)系如圖5所示。由圖5可見,采用上述方法補(bǔ)償后,UCA-UBC過零點(diǎn)時刻比eC延遲90°電角度。

圖5 線電壓的差值與反電動勢關(guān)系
3 無刷直流電動機(jī)雙閉環(huán)PWM控制
無刷直流電動機(jī)轉(zhuǎn)速、電流雙閉環(huán)PWM控制原理[5-6]如圖6所示。

圖6 無刷直流電動機(jī)轉(zhuǎn)速、電流控制原理框圖
轉(zhuǎn)速環(huán)為外環(huán),電流環(huán)為內(nèi)環(huán),外環(huán)將檢測到的速度信號與給定值進(jìn)行比較后,輸入至速度調(diào)節(jié)器ASR,ASR輸出值與電流互感器檢測到的電機(jī)定子繞組電流值進(jìn)行比較,結(jié)果輸入到電流調(diào)節(jié)器ACR中。ACR輸出值與三角載波信號比較并通過正、反轉(zhuǎn)邏輯判斷后輸出驅(qū)動功率開關(guān)器件的脈沖,實(shí)現(xiàn)電機(jī)轉(zhuǎn)速的控制。
由以上分析可見,三電平逆變器雙閉環(huán)驅(qū)動控制無刷直流電動機(jī)與兩電平逆變器基本類似。由于三電平逆變器功率開關(guān)器件有12個,其PWM驅(qū)動方式將有所不同,如圖7所示,采用2個獨(dú)立的三角載波TP和TN分別控制開關(guān)的通斷。

圖7 三電平逆變器PWM脈沖驅(qū)動原理圖

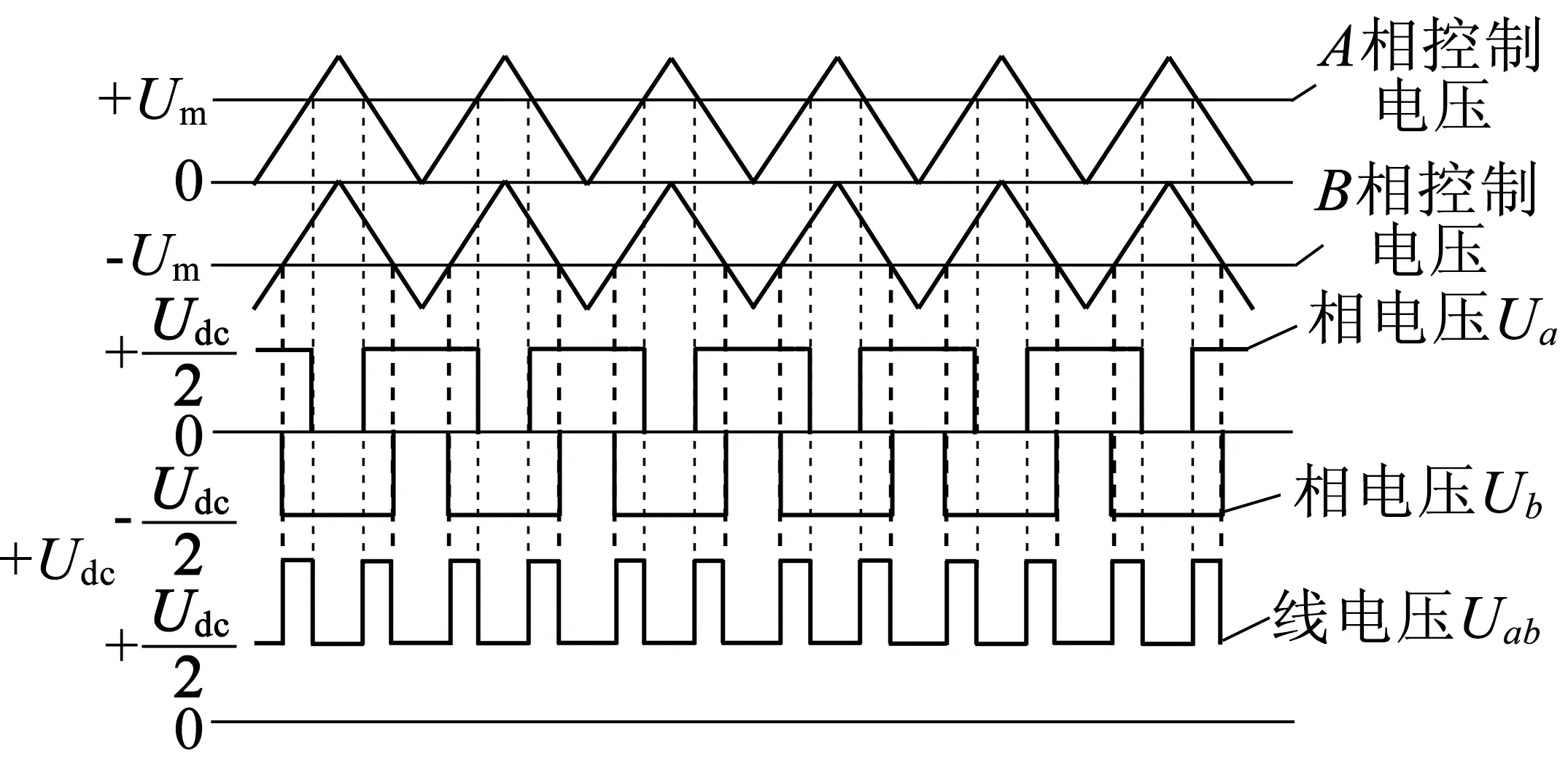
(a)占空比>50%三電平逆變器的相電壓和線電壓

(b)占空比<50%三電平逆變器的相電壓和線電壓
4 仿真和實(shí)驗(yàn)研究
針對三電平逆變器驅(qū)動結(jié)構(gòu)及基于線電壓差值的無速度傳感器控制方法進(jìn)行了MATLAB仿真。為了驗(yàn)證三電平逆變器驅(qū)動無刷直流電動機(jī)的優(yōu)勢,分別搭建了兩電平和三電平驅(qū)動仿真模型,仿真參數(shù)和過程一致系統(tǒng)直流母線電壓為500V;0~0.1 s內(nèi),電機(jī)空載運(yùn)行;0.1~0.35 s內(nèi),電機(jī)負(fù)載運(yùn)行,負(fù)載大小為3 N·m。A相定子繞組相電流仿真結(jié)果分別如圖9所示。

(a)兩電平逆變器

(b)三電平逆變器
圖9(a)是兩電平逆變器驅(qū)動無刷直流電動機(jī)時定子繞組A相電流波形及其放大電流波形,圖9(b)是三電平逆變器驅(qū)動無刷直流電動機(jī)時A相定子繞組相電流波形及其放大電流波形。由圖9可見,采用三電平逆變器驅(qū)動無刷直流電動機(jī)時,起動電流明顯低于兩電平逆變器驅(qū)動方式,且負(fù)載時的電流波動也比兩電平要小,表明三電平逆變器在抑制轉(zhuǎn)矩脈動方面具有優(yōu)勢。
采用樣機(jī)進(jìn)行了實(shí)驗(yàn),控制板采用DSP28335為主控制芯片,三電平逆變器主電路功率開關(guān)器件采用IGBT,實(shí)驗(yàn)參數(shù)如表2所示,實(shí)驗(yàn)波形如圖10、圖11所示。

表2 實(shí)驗(yàn)參數(shù)
當(dāng)A,B相導(dǎo)通,C相關(guān)斷,PWM占空比為25%時,實(shí)驗(yàn)波形如圖10(a)所示。其中通道1是AB相線電壓波形;通道2和通道3分別是A,B相橋臂中性點(diǎn)的電流波形;通道4是直流側(cè)電容中點(diǎn)電流波形。
當(dāng)A,B相導(dǎo)通,C相關(guān)斷,PWM占空比為75%時,實(shí)驗(yàn)波形如圖10(b)所示。其中通道1是A,B相線電壓波形;通道2和通道3分別是A,B相橋臂中性點(diǎn)的電流波形;通道4是直流側(cè)電容中點(diǎn)電流波形。
由圖10可見,線電壓波形與圖8分析一致,其幅值波動小,能夠有效減小轉(zhuǎn)矩脈動;直流母線電容中點(diǎn)電流波形與A,B相橋臂中性點(diǎn)電流波形之和相一致,且在一個周期內(nèi)中點(diǎn)電流平均值接近零。

(a) PWM占空比25%

(b) PWM占空比75%
如圖11所示,通道1和通道3分別是直流母線電壓正、負(fù)極波形;通道2是A相電流波形,與圖9仿真結(jié)果一致。由圖10、圖11可見,實(shí)驗(yàn)波形與理論分析結(jié)果一致,證明了所述三電平驅(qū)動方案的可行性及控制策略的正確性。

圖11 A相電流波形和直流母線電壓波形
5 結(jié) 語
本文采用三電平逆變器驅(qū)動無刷直流電動機(jī)的結(jié)構(gòu)及基于線電壓差值的無位置傳感器控制策略,有效地減少了轉(zhuǎn)矩脈動及電流紋波,提高了無刷直流電動機(jī)的控制性能。仿真和實(shí)驗(yàn)結(jié)果證實(shí)了所述控制策略的有效性和正確性,具有良好的工業(yè)應(yīng)用前景。
[1] 倪有源,陳浩,何強(qiáng).無位置傳感器無刷直流電機(jī)三閉環(huán)控制系統(tǒng)[J].電機(jī)與控制學(xué)報,2017,27(3):25-31.
[2] 夏長亮,郭培建,史婷娜,等.基于模糊遺傳算法的無刷直流電機(jī)自適應(yīng)控制[J].中國電機(jī)工程學(xué)報,2005,25(11):129-133.
[3] LAI Y S,LIN Y K.A unified approach to back-EMF detection for brushless DC motor drives without current and hall sensors[J].IEEE Trans.on Industrial Electronics, 2006,16(8):1293-1298.
[4] NAM K Y,LEE W T,LEE C M,et al.Reducing torque ripple of brushless dc motor by varying input voltage[J].IEEE Trans. on Magnetics,2006, 42(4):1307-1310.
[5] KOURO S,MALINOWSKI M,GOPAKUMAR K.Recent advances and industrial applications of multilevel inverters[J].IEEE Transactions on Industrial Electronics,2014,57(8):2553-2580.
[6] 史婷娜,肖竹欣,肖有文.基于改進(jìn)型滑模觀測器的無刷直流電機(jī)無位置傳感器控制[J].中國電機(jī)工程學(xué)報,2015,8(9):55-56.
