導軌移動式香蕉采摘機結構設計
2018-05-02 12:19:42朱冬云曲軍遠徐略強張寶珍
食品與機械 2018年1期
朱冬云 - 曲軍遠 - 徐略強 - 張寶珍 - 吉 祥
(1. 海南大學機電工程學院,海南 海口 570228;2. 海南大學國有資產管理處,海南 海口 570228)
香蕉是熱帶及亞熱帶地區的重要經濟作物,特別是在中國的海南地區是極其重要的經濟作物。海南具備發展香蕉產業的優越生態條件,海南香蕉的種植面積逐年增加,是中國重要的香蕉生產基地,也是發展高產、高品質香蕉最理想的生產基地[1-3]。香蕉屬草本植物,香蕉果串達到商品期時,果實整體為近似圓柱型,重量約為25 kg,直徑約為80 cm,高150 cm的大重量、大體積圓柱狀果串。目前國內外香蕉的采摘工作主要由人工完成,采摘效率低、勞動量大、采摘成本高,約占生產成本的1/3,且人員傷殘事故常發生。
當前,國內外香蕉采摘技術主要有以下2種方式:第一種,采摘香蕉時,利用輔助裝置對香蕉果串支撐保護[4]。這種相對人工采摘可減少機械損傷,但勞動強度還是很大;第二種,利用牽引裝置配置機械手等部件來實現香蕉的機械化采摘[5]。這種采收方式的前期投入非常大,維護成本高,對設備操作人員的技術水平要求也很高。目前在中國,特別是在海南還是以人工采摘為主,但香蕉采摘作業是季節性較強和勞動密集型的工作,采摘作業勞動量大,人工采摘效率低、用工量大,經常發生在用工高峰期找不到工人的現象[6-8]。因此,香蕉產業迫切地要提高香蕉采摘的機械化及自動化程度,降低香蕉果的損傷率,節省人工成本,提高蕉農的經濟效益,讓工人從單調、繁重、危險的采摘作業上解放出來。
本設計將導軌移動式香蕉采摘機固接在牽引裝置上,通過導軌的移動使得采摘裝置達到指定的位置。擬通過液壓缸和導軌的導向作用提高采摘精度和生產效率,降低蕉果的損失,減少人員傷殘事故的發生,使香蕉采摘工序做到精確、簡便、高效、安全。
1 整機結構和工作原理
1.1 整機結構
海南大部分香蕉種植地為坡地,導軌移動式香蕉采摘機固接在牽引裝置上較為適合海南的蕉園地理環境,也便于牽引裝置一機多用,同時也有利于采摘的下一道工序——香蕉果串的運輸實現機械化、自動化[9]。導軌移動式香蕉采摘機整機主要由底座、移動裝置、夾緊裝置、切割裝置等組成,見圖1。該機器在機械載體的牽引下到達指定的位置,機器通過升降、夾緊、切割3道工序實現香蕉采摘。移動裝置由液壓缸、導軌組成;夾緊裝置由液壓缸、滑塊、夾爪組成;切割裝置由皮帶連接伺服電機、刀具組成;底座固接在牽引裝置上,夾緊裝置、切割裝置都安裝在連接板上側的導軌上,夾緊裝置、切割裝置通過移動裝置可實現上下和右左的移動,實現夾緊、切割,完成采摘。
1.2 工作原理與技術參數
工作時,在底座液壓缸的作用下帶動升降板實現向上移動達到所需的高度,在控制前后移動的液壓缸作用下,將刀具裝置和夾具裝置體帶動著一起向前或后移動,通過液壓缸的微調作用將夾爪對準香蕉串軸徑,將香蕉軸徑引進夾爪內側,夾爪在液壓缸和滑塊作用下夾緊香蕉軸莖。同時伺服電動機驅動皮帶輪旋轉,帶動刀片旋轉,在控制前后的液壓缸作用下向前移動,刀片對準香蕉軸頸進行切割,將香蕉果串與香蕉樹分離。在底座液壓缸的作用下帶動升降板向下移動到指定的高度,在液壓缸和滑塊作用下松開夾爪,實現香蕉的采摘[10]。導軌移動式香蕉采摘機主要技術參數見表1。
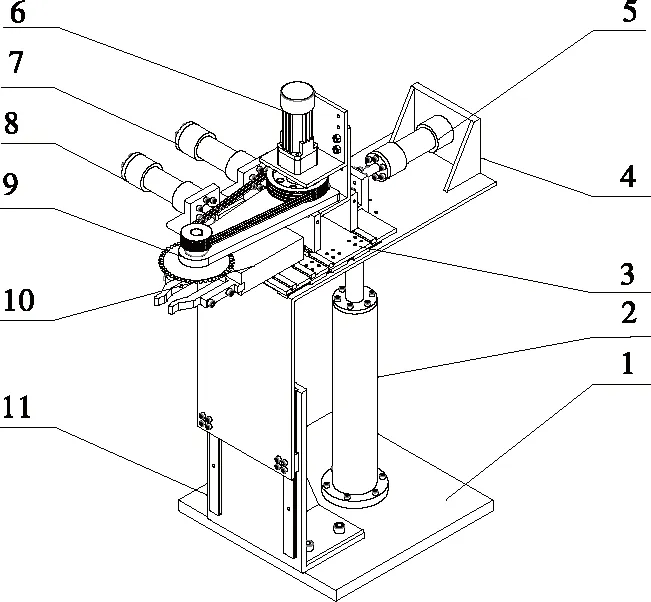
1. 底座 2. 底座液壓缸 3. 導軌安裝板 4. 升降板 5. 1號液壓缸 6. 伺服電機 7. 2號液壓缸 8. 3號液壓缸 9. 刀具體 10. 夾具體 11. 升降導向板
圖1 導軌移動式香蕉采摘機結構示意圖
Figure 1 Mobile banana guide picking machine structure diagram

表1 主要技術參數Table 1 Main parameters
2 關鍵部件設計
2.1 移動裝置
2.1.1 整體結構 移動裝置由液壓缸、導軌構成。連接板內側安裝的滑塊安裝在底座升降板上,見圖2。
2.1.2 移動過程 夾緊裝置和切割裝置都安裝在連接板導軌上,在底座液壓缸、升降導向板作用下實現上下移動。通過連接板上的液壓缸伸出桿的推力和導軌的導向作用實現左右移動。為了降低零件的加工難度,采用導軌連接和板連接塊,在零件的右側利用螺釘將導軌連接板和連接塊連接。
2.1.3 設計 底座液壓缸的行程為0.5 m,若以安裝面為1 m 的機械載體安裝香蕉采摘機,該機構的升降工作范圍為1.5~2.4 m,香蕉需切果徑距地面約2 m,該機構的升降工作范圍符合香蕉果串采摘要求。
香蕉采摘機的底座升降板是一個重要部件,見圖2(a)。由于承受了整機的重量,且需要保證運動平穩,所以升降導軌設計的強度、剛度要高于其他導軌的。升降板機構下方連結使升降板實現上升和下降的液壓缸,利用液壓桿的伸縮使機構進行升降移動,升降板的垂直面上安裝2個滑塊,兩滑塊的主要作用是與升降導向板連結,防止升降液壓桿在上升的過程中左右轉動,這一設計提高了升降系統對外力的干擾作用,保證了導軌的上升、下降運動的平穩和順暢。夾緊裝置和切割裝置都安裝在連接板導軌上方,在前后、左右的液壓缸伸出桿的推力和導軌的導向作用下實現前后、左右移動。考慮降低零件的制作難度,在導軌連接板右側利用螺釘和連接塊進行連接,避免升降板在上升過程中連接塊做不必要的轉動,提高整機的剛性。

圖2 移動裝置Figure 2 Mmobile device
升降導向板通過導軌的導向,使得升降板在上升過程中避免不必要的轉動,升降導向板上的導軌選用M8粗牙螺栓與垂直面連接,以防止導軌滑動,底面使用M16粗牙螺栓與香蕉采摘機載體連接見圖2(b),提高系統剛性。
導軌連接板是采摘機的樞紐,是連接底座、刀具體、夾具體的連接體見圖2(c)。夾具體和刀具體都安裝在導軌連接板上,在液壓缸伸出桿的推力和導軌的導向作用下,夾具體、刀具體實現上下、左右移動,夾具體對香蕉果軸夾緊,刀具體對香蕉果軸進行切割,實現香蕉采摘。
借鑒國內升降類產品的相關技術參數[11],升降平臺的升降時間設置為20 s,最大上升時間為10 s,其移動速度為0.025~0.05 m/s,設備運行是平穩的、安全的、高效的,相對傳統人工采摘,采摘效率可提高90%。
2.2 夾緊裝置
2.2.1 整體結構 夾緊裝置由液壓缸、滑塊、夾爪組成。如圖3所示,夾緊裝置固定在安裝板,夾爪上有2個安裝孔,用以安裝在標準件擺動液壓缸上。考慮香蕉軸徑能順利滑入夾爪內側,夾爪前部分向前張開呈8°。這一設計解決了果串在空中搖擺,難于固定的問題,縮短對正時間,提高了固定準確率,從而提高了生產率。
2.2.2 夾緊過程 在控制前后移動的液壓缸作用下,夾具體向前或后移動,通過左右液壓缸的微調作用將夾爪對準香蕉串軸徑,將香蕉軸徑引進夾爪內側,夾爪在液壓缸和滑塊作用下夾緊香蕉果軸。垂直面的螺栓孔是和液壓缸伸出桿連接以推動安裝在水平面上的夾具體,實現左右微調。這一設計解決了香蕉采摘過程中對香蕉果軸的固定,因香蕉果串不是工業產品,其形狀、重量、體積受自然因素的影響較大,同一批香蕉,會因陽光、風向、位置等因素不同,最后產出的香蕉果串的形狀、體積、重量不一樣,香蕉果串的彎曲程度也不同。夾緊裝置保證了在香蕉采摘的整個過程中,蕉果不與裝備接觸,避免了蕉果受到機械損傷,有效地保證香蕉果的商品價值。同時采用此夾緊裝置可在完成采摘后,工人或裝置可順勢將香蕉串平放到指定的位置,有利于下一道工序(香蕉運輸)實現機械化及自動化。
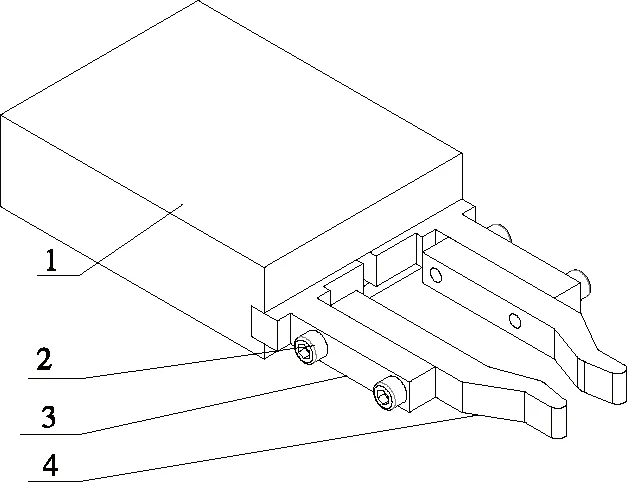
1. 夾具體主體 2. 螺釘 3. 滑塊 4. 夾爪圖3 夾緊裝置Figure 3 Clamping device
2.3 切割裝置
2.3.1 整體結構 切割裝置主要由伺服電動機、皮帶輪、皮帶、刀片組成,見圖4。伺服電動機安裝在固定板上,固定板安裝在連接板上。本設計由皮帶連接伺服電機和刀具構成的切割機構,伺服電機為切割結構提供平穩可靠動力;通過皮帶連接,使得伺服電機與刀片有一定的距離,有效地防止香蕉汁液對伺服電機腐蝕。因香蕉果串相對其他水果是大重量、大體積果串,其果軸由粗大纖維構成,根據大量試驗選用齒形為三角形、梯形的刀片,能保證對香蕉果軸切割穩定有力,又可降低能耗,同時防止果軸在切割過程中出現撕裂現象,影響整串香蕉果商品價值。
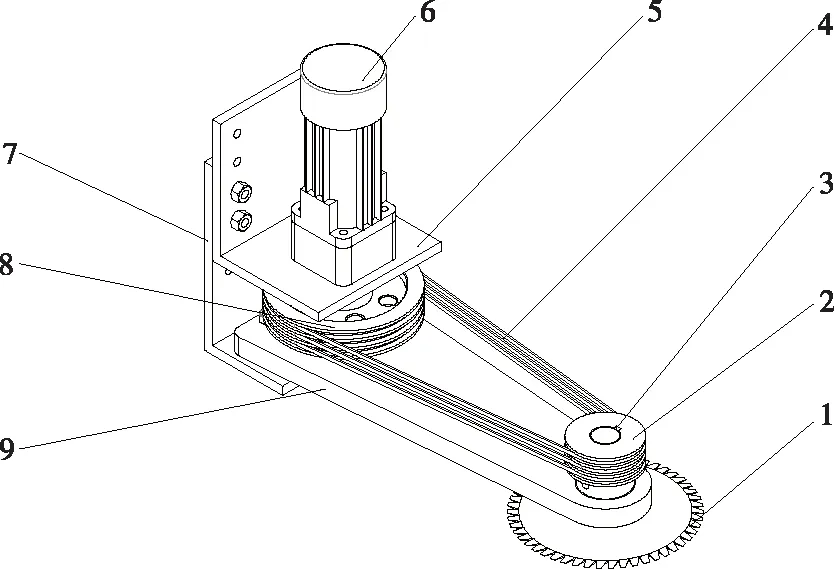
1. 刀片 2. 小帶輪 3. 刀片軸 4. 皮帶 5. 電機支撐板 6. 伺服電機 7. 電機立板 8. 大帶輪 9. 刀具支撐板
圖4 切割裝置
Figure 4 Cutting device
2.3.2 切割過程 在夾緊裝置對香蕉果軸實現夾緊的同時伺服電動機驅動皮帶輪旋轉,帶動刀片旋轉,在液壓缸向前移動的作用下,旋轉的刀片對香蕉軸頸進行切割,將香蕉果串與香蕉樹分離。切割裝置是利用刀片旋轉進行切割香蕉桿莖使香蕉和果樹分離,而刀具旋轉的動力是通過固定在電機固定板上的伺服電機驅動,伺服電機和刀具通過皮帶連接,伺服電機通過螺栓和電機固定板連接,電機固定板固接在升降板上。皮帶輪與軸利用鍵連接來傳遞扭矩,同時為了避免在重力的作用下脫落使用緊固螺釘進行安裝。刀片利用軸肩定位再用螺母和墊片對刀片進行固定。
3 結論
本研究在符合香蕉采摘農藝要求及采摘工序的前提下,著重對各關鍵零部件進行了設計,并使用CAD/CAM、Solidworks等軟件設計表達導軌移動式香蕉采摘機零部件及整機裝備結構。
導軌移動式香蕉采摘機滿足丘陵地區香蕉采摘,實現了香蕉采摘機械化,降低了人工成本(達30%~45%),減輕了工人采摘的勞動強度;提高了香蕉采摘精度,易于工人操作,與傳統人工采摘方法相比,采摘效率可提高90%。不過,導軌移動式香蕉采摘機還未實現智能化,智能化是采用計算機智能視覺識別系統,準確地確定香蕉軸徑的位置及識別香蕉的成熟成度,精確、快速地切割,實現精確的“標靶”采摘,這是農業實現現代化、自動化的發展方向,也是未來采摘機械的努力方向。
[1] 李玉萍, 方佳, 董定超, 等. 世界香蕉產業的發展現狀與發展趨勢分析[J]. 廣東農業科學, 2008(2): 115-119.
[2] 張浩棟, 張燕, 曾小英, 等. 基于PLC的香蕉秸稈自動打包機的設計和控制研究[J]. 食品與機械, 2013, 29(1): 115-121.
[3] 鄭維全, 鄔華松, 楊建峰, 等. 海南特色香蕉種植優勢與發展對策[J]. 熱帶生物學報, 2011(3): 260-263.
[4] 王小純, 王勇, 陸語嶄, 等. 砍蕉機械輔助裝置: 中國, 200820104184[P]. 2009-01-28.
[5] TRANSFORM Australia. Mechanical banana harvester[EB/OL]. [2017-09-12]. http://www.transformaustralia.com.au / harvest.htm.
[6] 朱冬云, 曲軍遠, 劉世豪, 等. 海南香蕉采摘技術現狀及發展趨勢[J]. 熱帶農業工程, 2015, 39(1): 25-27.
[7] 柯佑鵬, 過建春, 夏勇開. 2013年海南香蕉產業損害監測預警分析報告[J]. 中國熱帶農業, 2014(2): 41-43.
[8] 柯佑鵬, 過建春, 夏勇開. 2011年海南省香蕉產業損害監測預警分析報告[J]. 中國熱帶農業, 2012(2): 20-23.
[9] 尹秋, 王濤, 張喜瑞, 等. 香蕉果梗切割力學特性試驗[J]. 中國農機化學報, 2013(7): 75-77.
[10] 朱冬云, 曲軍遠, 徐略強. 導軌移動式香蕉采摘機: 中國, ZL201410488739.1[P]. 2016-04-20.
[11] 梁棟, 張勁. 椰果采摘機液壓系統設計[J]. 液壓與氣動, 2010(5): 27-29.
