空間碎片軟捕獲姿軌控模型構建與仿真
2018-05-03 03:38:10劉志威董正宏葉新楊帆
航天器環境工程 2018年2期
關鍵詞:模型
劉志威,董正宏,葉新,楊帆
?
空間碎片軟捕獲姿軌控模型構建與仿真
劉志威1,董正宏2,葉新1,楊帆2
(1. 航天工程大學 研究生院; 2. 航天工程大學 航天信息學院:北京 101416)
為構建利用柔性機械臂捕獲空間碎片的系統仿真模型,首先分析梳理空間碎片捕獲典型任務流程,包括軌道轉移、位置保持、路徑規劃、動量穩定控制等階段;然后針對任務流程分別搭建基于SimuLink的路徑規劃、動量緩沖控制、姿態控制、動力學和軌道仿真等子系統;各個子系統之間以TCP/IP的方式進行數據交互,最終完成空間碎片軟捕獲任務姿軌控仿真系統的構建。
柔性機械臂;空間碎片移除;姿軌控;系統仿真
0 引言
空間碎片對在軌航天器的安全構成嚴重威脅,尤其是中等尺寸碎片(1~10cm)的撞擊會使航天器姿態和軌道發生改變,甚至導致航天器損毀。
針對中等尺寸空間碎片,可以采用主動移除的方式進行清理。空間碎片屬于典型非合作目標;多國對利用帶有機械臂的空間機器人捕獲非合作目標進行了研究[1-2]。美國的FREND機械臂[3-4]和日本的JEMRMS機械臂[5-6]等均在空間進行過抓捕非合作目標的試驗;國內的哈爾濱工業大學[7]、北京郵電大學[8]和航天工程大學[9]等單位也對空間機械臂技術開展了相關研究。
傳統的剛性機械臂由于其關節和臂桿均為剛性,在末端和非合作目標接觸碰撞時會產生瞬間沖量,極易導致基座翻滾,使任務失敗[2]。利用柔性機械臂技術捕獲空間碎片可以克服剛性機械臂動量不可控的缺點。然而國內尚沒有利用柔性機械臂系統進行空間碎片捕獲的仿真系統。
本文分析梳理典型空間碎片捕獲任務流程,構建各任務階段的仿真模型,并在此基礎上搭建仿真系統,以實現空間碎片軟捕獲的模塊化和可視化。
1 需求分析和框架設計
1.1 任務流程與仿真需求
無論空間機器人執行何種任務,都需要通過近距離操作來完成,本質上都屬于航天器相對運動的范疇。對于抓捕類的航天任務,任務過程設計需要從與目標交會、近距離捕獲、轉移釋放等階段進行分析。典型空間碎片捕獲移除的流程如圖1所示,任務流程與系統仿真需求的對照分析見表1。
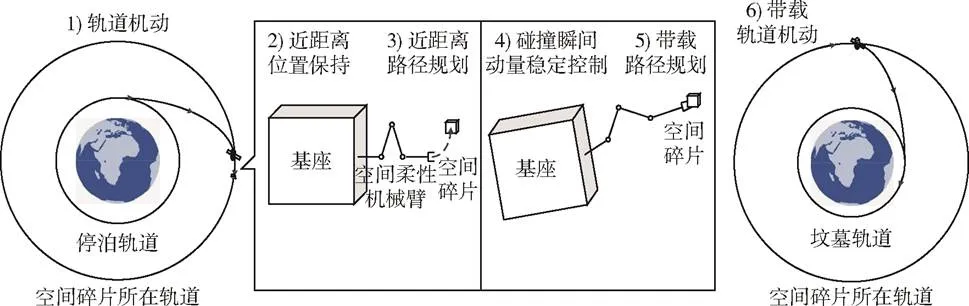
圖1 典型空間碎片捕獲移除流程

表1 任務流程與系統仿真需求對照分析
1.2 框架設計
本節主要進行空間碎片軟捕獲總體研究方案的設計,從不同層級和角度展開研究[10]。
如圖2所示,為完整地表示空間碎片軟捕獲仿真流程,需要構建以下仿真子系統:衛星軌道仿真子系統主要用于軌道機動的三維和二維顯示,可以利用STK與VS聯合仿真的方式進行設計與實現;動力學仿真子系統主要用于柔性機械臂系統的姿態顯示,可以基于UG NX進行動力學模型的構建;三軸穩定控制子系統、路徑規劃子系統和動量穩定控制子系統分別用于軌道機動、路徑規劃和動量控制,可以利用MatLab/SimuLink進行模型構建;數據管理子系統用于初始化參數的輸入和任務流程編輯,主要基于VS實現;數據交互調度子系統用于各個子系統之間的數據交換,主要基于VS實現。
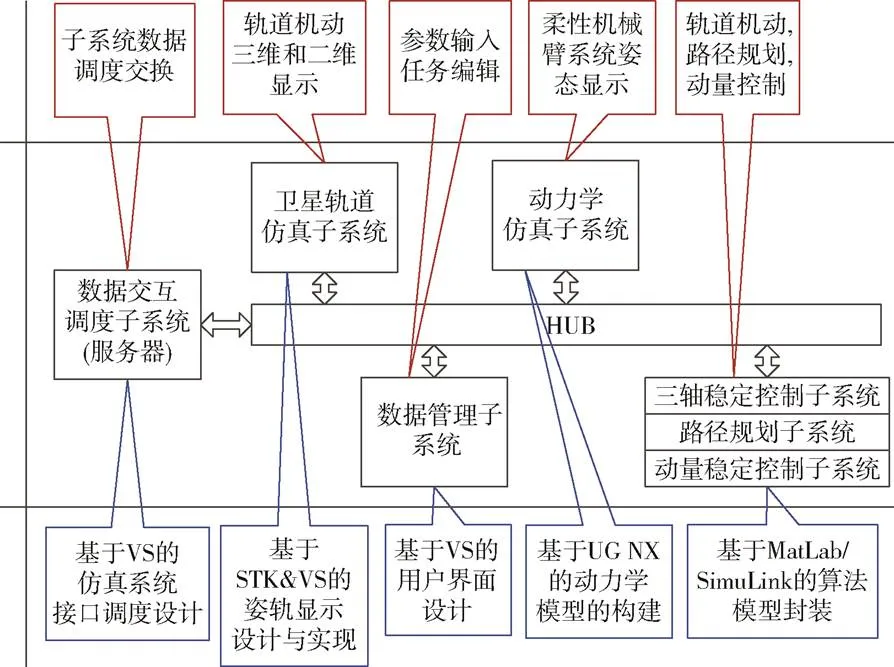
圖2 空間碎片軟捕獲仿真系統設計框架
2 系統集成
2.1 仿真系統運行控制流程
結合空間碎片軟捕獲的任務流程以及仿真系統的結構設計,可以分析得到仿真系統的運行控制流程。
圖3為基于任務與應用邏輯映射的仿真系統數據流程。初始化階段由可視化任務編輯系統向各個子系統發送初始化指令,設置各個系統的初始化狀態。軌道轉移和帶載轉移階段,姿態控制子系統將軌道控制數據通過接口調度子系統傳輸給軌道仿真子系統。位姿保持、路徑規劃和緩沖控制階段,姿態控制數據輸出給動力學子系統;動力學子系統輸出姿態數據,并通過接口調度子系統傳輸給軌道仿真子系統。停止階段,任務編輯系統向各個子系統發送停止指令,停止各個系統的仿真運行。
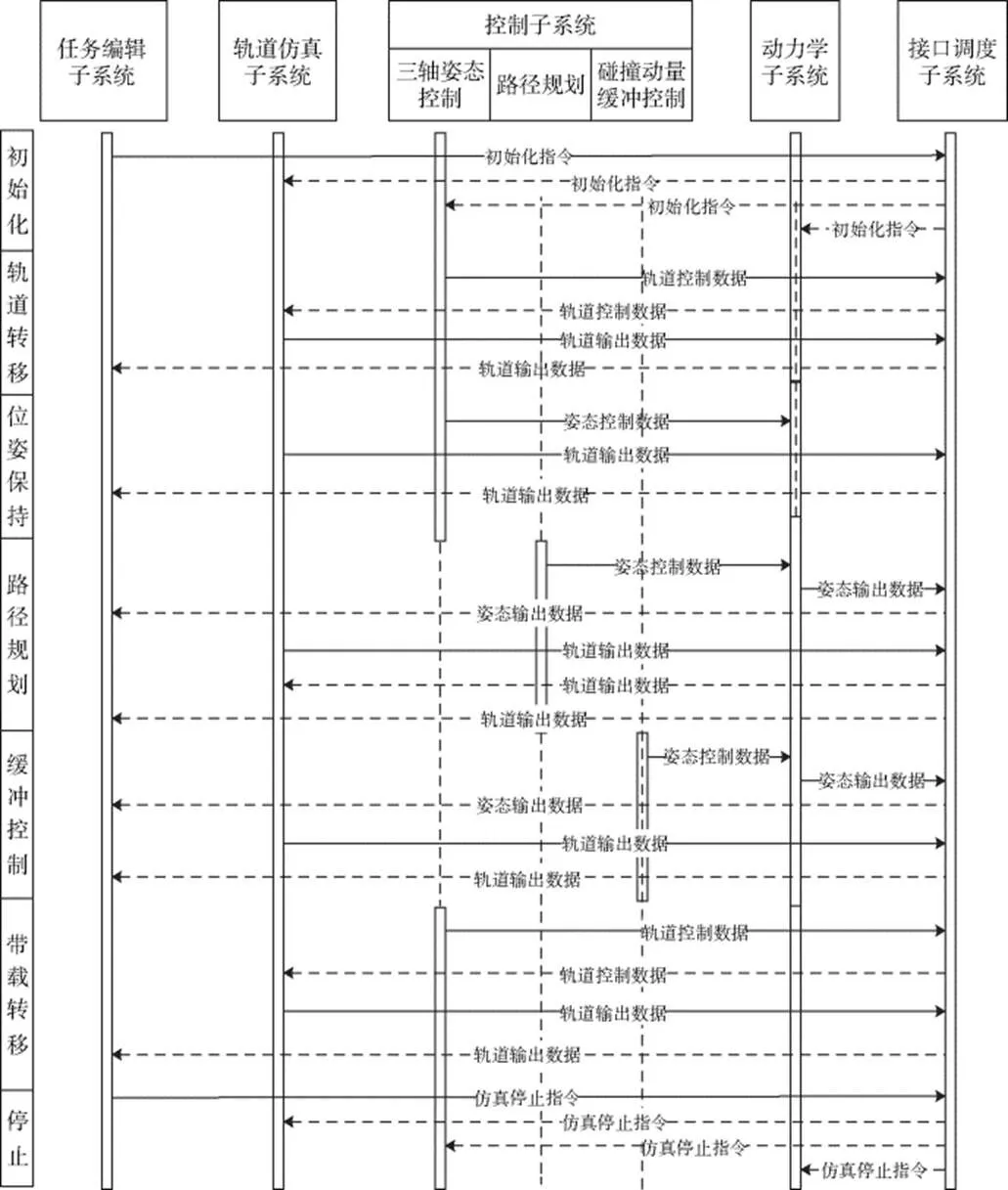
圖3 基于任務與應用邏輯映射的仿真系統數據流程
2.2 仿真系統數據交互結構
根據上述仿真系統的結構及其運行控制流程可知,交互數據類型包括仿真控制指令、初始化數據、軌道控制數據、姿態控制數據、軌道輸出數據和姿態輸出數據。其數據交互機制如圖4所示。
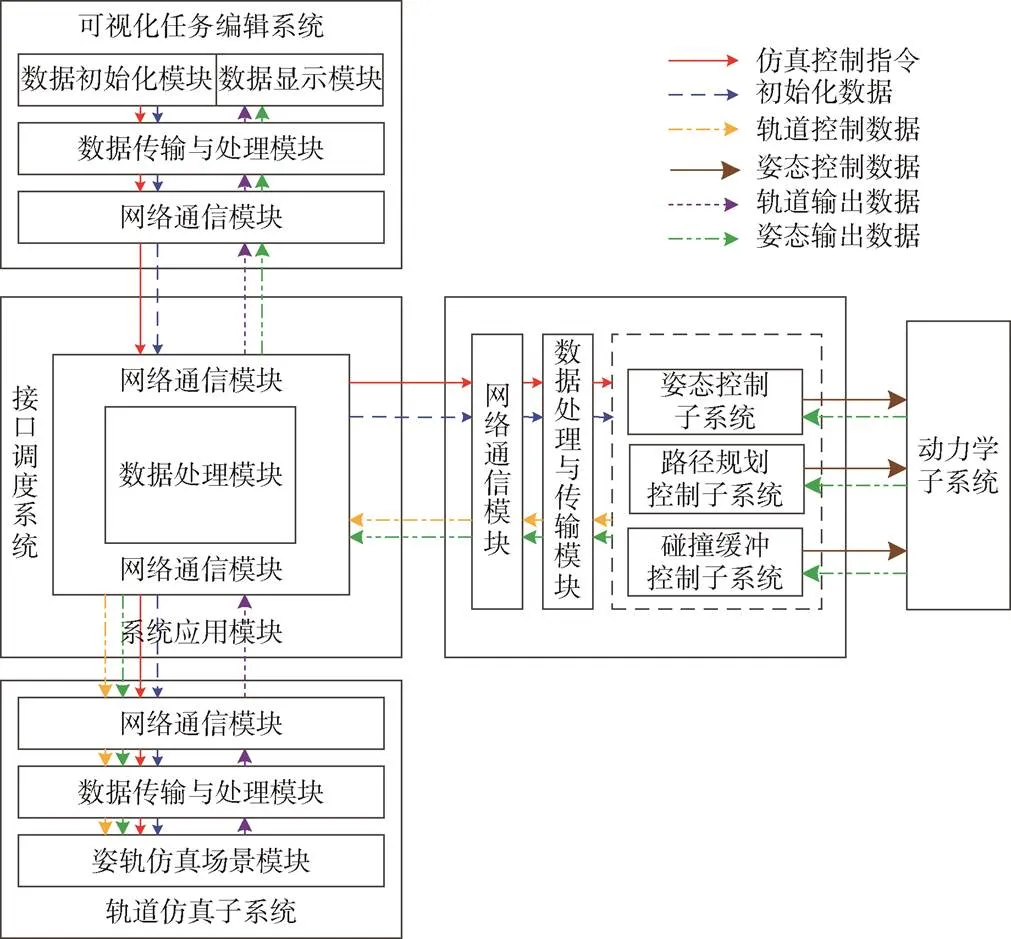
圖4 仿真系統數據交互機制
3 系統構建與實現
3.1 動力學子系統
關節機理模型設計一方面要在靈活度、工作空間、復雜度等方面滿足路徑規劃需求;另一方面要能夠減小衛星平臺受到的干擾動量,并可通過一定的協同控制將脈沖式傳遞轉化為諧波式傳遞,以滿足干擾動量控制需求。因此,關節機理模型設計必須包含剛性傳動單元和柔性可控阻尼單元2大功能模塊。柔性機械臂關節機理及三關節機械臂系統的三維模型如圖5所示[9]。
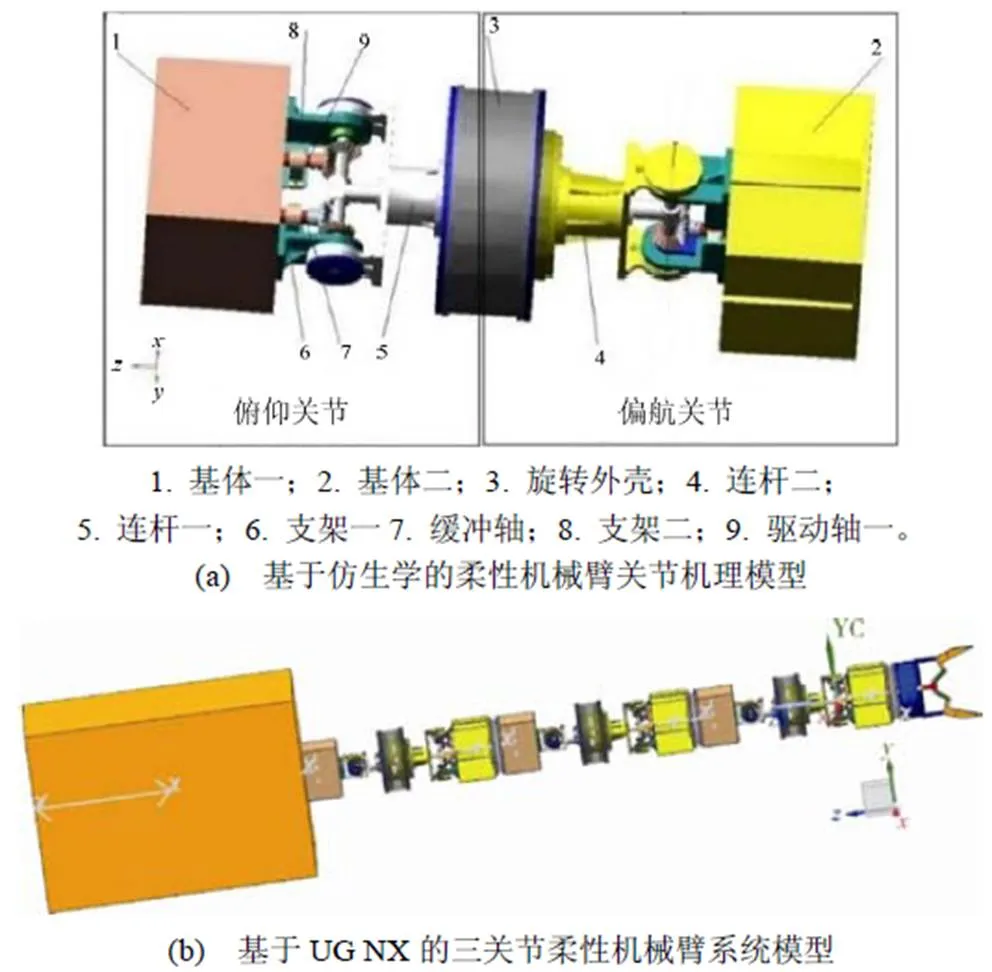
圖5 柔性機械臂關節與系統模型
基于UG NX的空間機器人動力學模型進行動力學仿真的流程如圖6所示。本文的仿真設計過程中,主要通過控制關節旋轉副的扭矩來實現空間機器人的運動仿真,因此為3個關節各自的俯仰軸、偏航軸設置扭矩。輸入形式為函數驅動,工廠輸入就是扭矩函數;工廠輸出設置為基座、關節、末端執行器的位移、角度、速度/角速度、加速度/角加速度。解算器分析類型為控制/動力學,解算方案類型為常規驅動,重力參數為0。對解算器進行求解,可以得到包含空間機器人控制/動力學的.m文件,運行產生.mdl文件,可以集成到SimuLink之中進行解算。
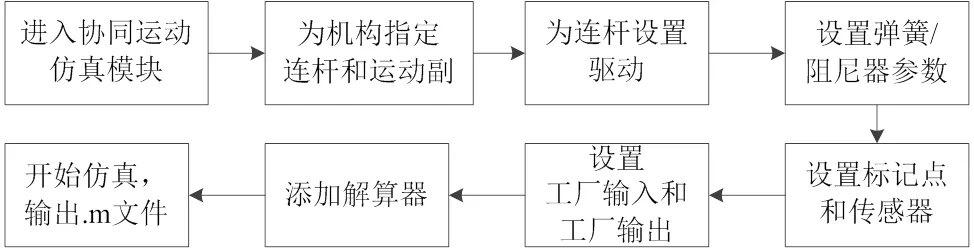
圖6 基于UG NX的動力學模型構建
3.2 路徑規劃子系統
路徑規劃控制子系統主要包括空間機器人路徑規劃算法模塊、NX動力學模型模塊、數據傳輸與處理模塊和網絡通信模塊4部分。
各模塊之間關系如圖7所示:路徑規劃算法模塊是基于廣義雅可比矩陣的運動學逆解構建的[11],利用MatLab/SimuLink進行封裝,輸入為末端執行器的初始及終了位姿,輸出為空間機器人關節的角度序列;NX動力學模型模塊接收關節角速度序列并進行動力學解算;數據傳輸與處理模塊則用于對接收和發送的數據進行解析和封裝;網絡通信模塊負責以TCP/IP協議規范的形式接收和發送指令及數據。
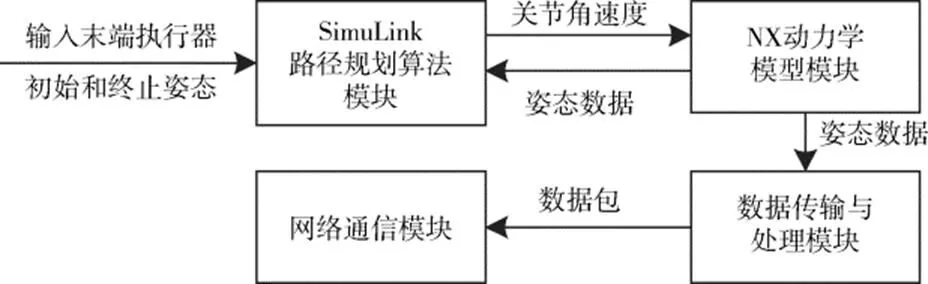
圖7 路徑規劃子系統SimuLink模型構建
3.3 動量緩沖控制子系統
本節對空間軟接觸機構與目標星碰撞后的緩沖過程方法進行研究。實際任務中,往往存在由于目標衛星對空間機器人的碰撞動量過大而導致空間機器人翻滾失控的風險,因此應控制空間機器人的基座所受到的擾動,越小越好。以空間軟接觸機構基座受到的干擾動量最小為期望函數,提出各關節驅動力矩的最優控制方法,如圖8所示。
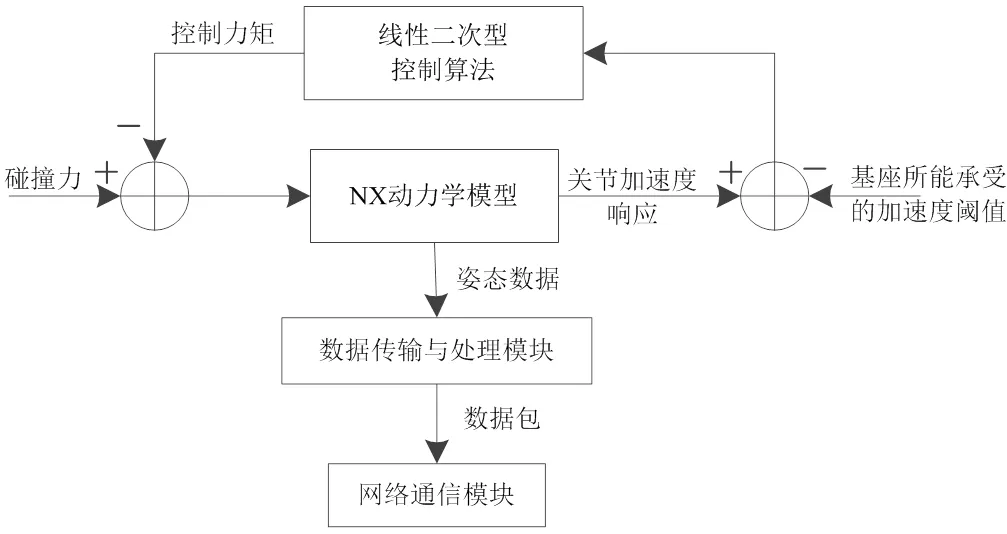
圖8 動量緩沖控制子系統SimuLink模型構建
3.4 姿態控制子系統
空間機器人三軸姿態控制使空間機器人相互垂直的3個軸(本體軸)在空間相對于某個參考系具有預期方向。三軸姿態控制系統包括姿態敏感器、姿態控制器和姿態控制執行機構。衛星姿態控制基本原理如圖9所示,姿態控制器的輸入為本體系相對軌道系的歐拉角偏差,輸出為本體系三軸輸出的控制力矩。
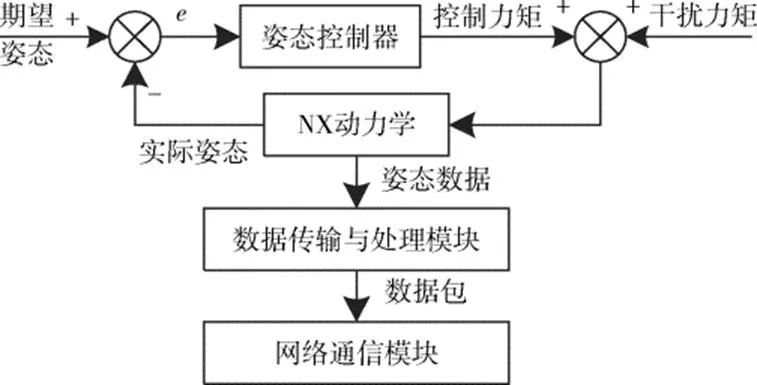
圖9 姿態控制子系統SimuLink仿真模型構建
3.5 軌道仿真子系統
為了構建軌道仿真子系統中空間機器人的三維可視化模型,需要將UG NX軟件中已經構建好的柔性臂模型轉換為可被STK模塊加載的.mdl格式,完成軌道仿真子系統中的柔性臂模型。模型格式轉換的流程如圖10所示。
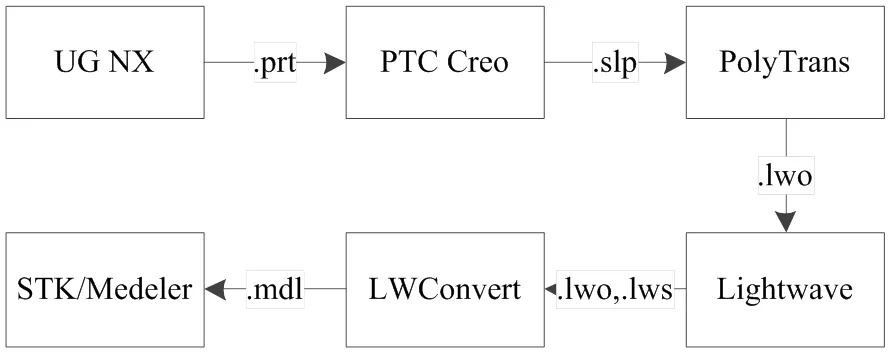
圖10 柔性臂模型格式轉換流程
空間機器人軌道仿真子系統應能在接收到上述4個子系統傳來的軌道和姿態數據后,實時地顯示空間機器人進行軌道轉移、路徑規劃和碰撞后穩定控制階段的空間姿態。因此,軌道仿真子系統應包括網絡通信模塊、數據傳輸與處理模塊、姿軌仿真場景模塊[12],如圖11所示。
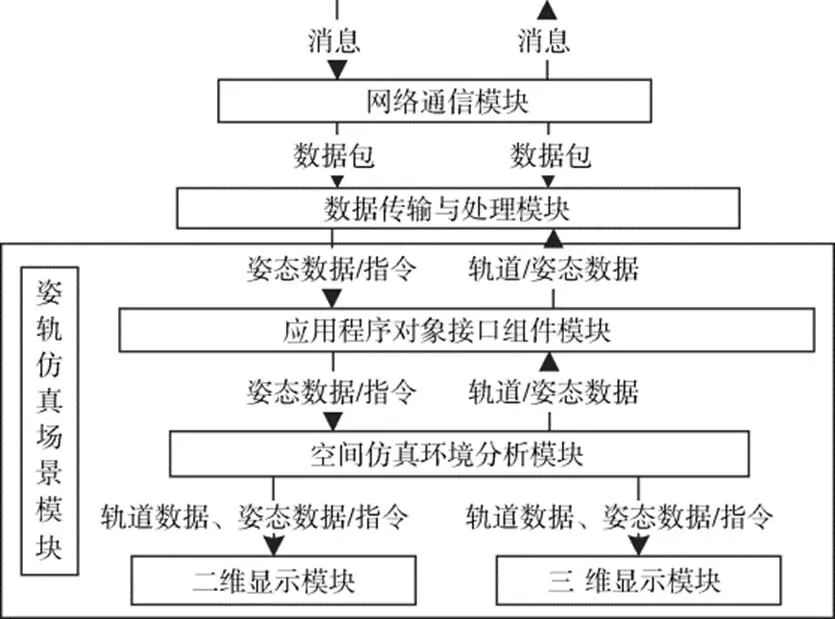
圖11 軌道姿態仿真子系統模型組成
網絡通信模塊接收其他子系統發送的消息,再通過數據傳輸與處理模塊對消息進行解析,根據相應指令變更場景的運行狀態,或者利用控制系統提供的空間機器人姿態數據,在實時推進衛星軌道狀態的同時改變三維場景中空間機器人姿態,實現軌道與姿態的同步仿真,并輸出星歷數據。數據傳輸與處理模塊負責本子系統數據和指令的接收、分發、解包和打包,網絡通信模塊則負責與接口調度子系統進行通信。應用程序對象接口組件模塊用于接收STK/X組件的場景變更命令,傳輸至STK分析引擎并輸出各項實時場景參數。二維顯示模塊和三維顯示模塊分別負責二維空間衛星軌道實時態勢和三維空間衛星姿軌實時態勢的顯示。空間仿真環境分析模塊負責空間仿真環境的構建與分析。
按照第2章分析得到的任務流程,在構建軌道仿真系統時需要借助STK API函數,提供場景的載入和初始化,設置模型和關節,軌道機動,仿真推進,以及空間機器人姿態更新與參數輸出。具體功能如表2所示。

表2 軌道仿真API函數
4 仿真案例
按照上述的仿真流程進行仿真案例設計,仿真參數和仿真結果如下。
4.1 仿真參數
姿軌控仿真的初始參數包括柔性機械臂參數和空間碎片捕獲姿軌仿真參數,具體設置見表3和表4。
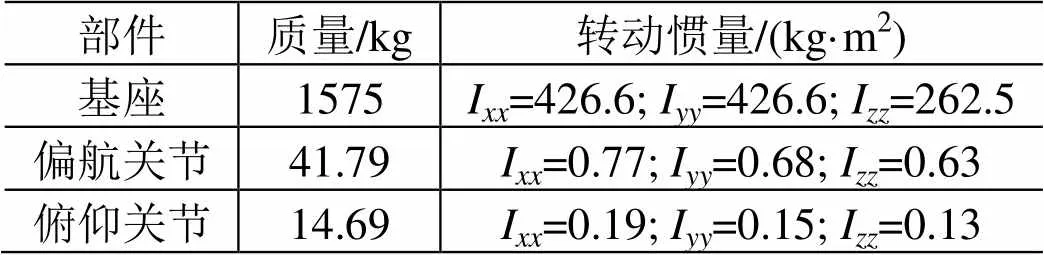
表3 柔性機械臂參數設置
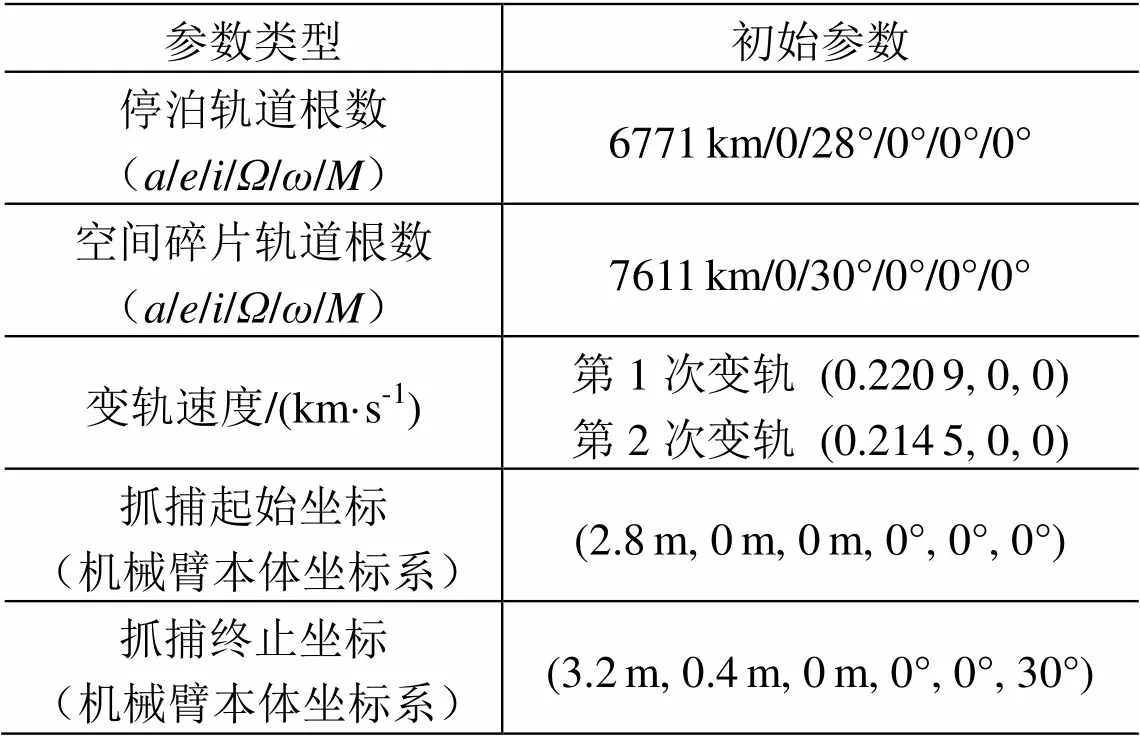
表4 空間碎片捕獲姿軌仿真參數設置
4.2 仿真結果
1)路徑規劃結果
路徑規劃結果如圖12所示,可以看出末端的位置和姿態均已規劃到期望的結果,說明可以采用基于運動學逆解進行關節角速度規劃。
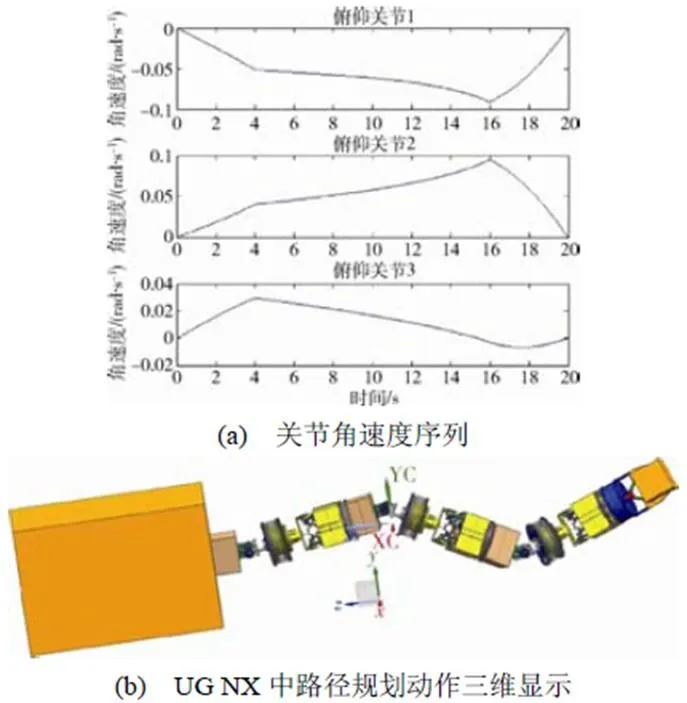
圖12 路徑規劃的關節角速度序列與三維顯示
2)緩沖控制結果
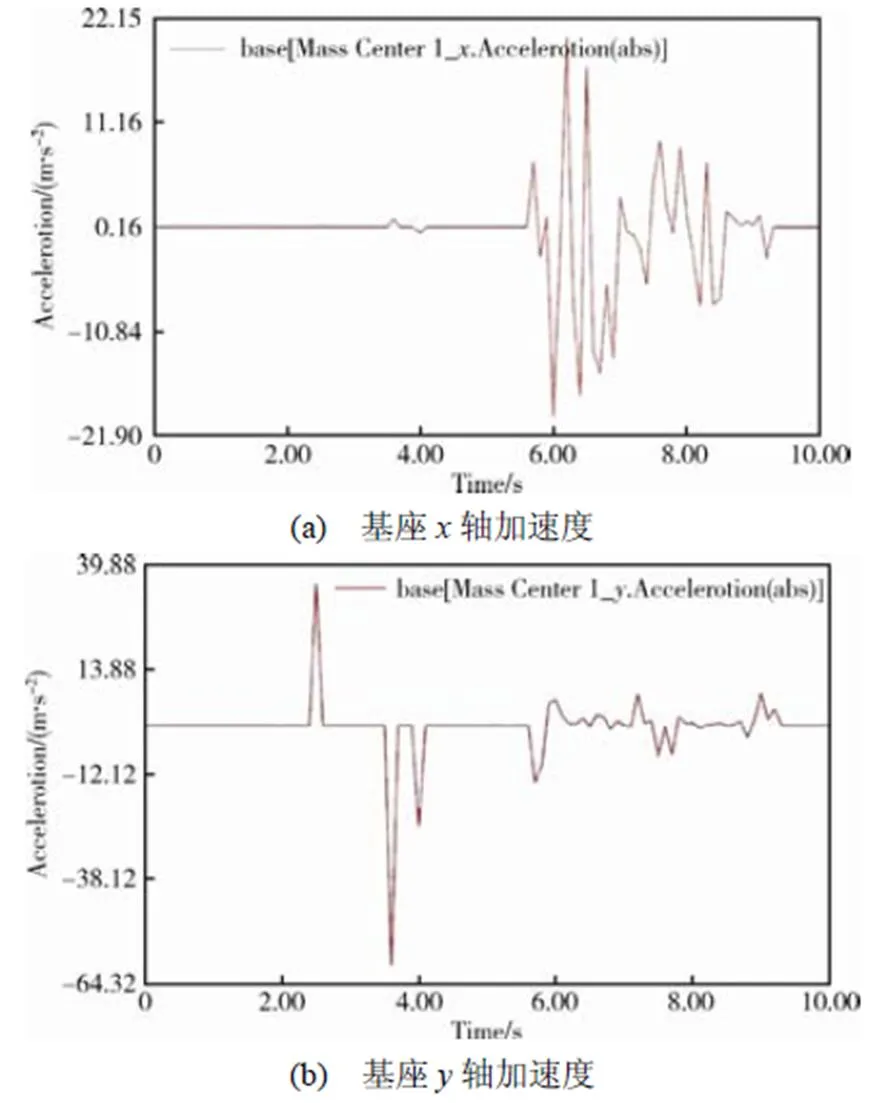
圖13為空間柔性機械臂系統在、、方向的動量緩沖控制效果,可以看出動量逐漸衰減,未對基座產生劇烈影響。結果表明,以基座加速度最小為期望函數,利用線性二次型控制算法可以得到相應的最優控制力矩,能夠比較好地完成碰撞動量的緩沖過程。
3)姿軌仿真結果
圖14為姿軌仿真結果,可以看出采用VS與STK聯合仿真的形式能夠完成對柔性機械臂系統的加載和姿軌顯示,采用霍曼轉移算法能夠得到柔性機械臂系統軌道轉移速度,達到接近空間碎片的目的。
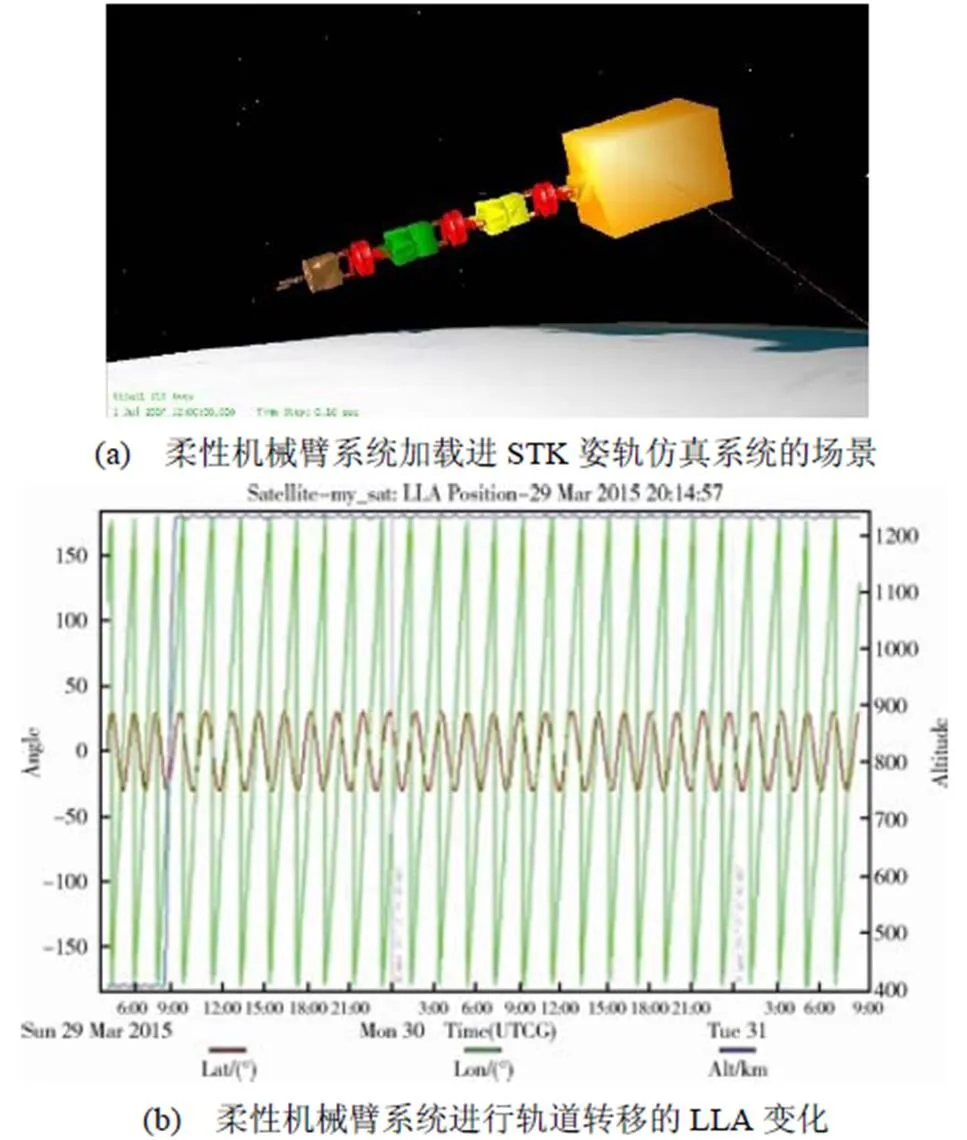
圖14 姿軌仿真場景與數據輸出
5 結束語
本文分析梳理了利用柔性機械臂系統捕獲空間碎片的典型任務流程,針對各個任務階段分別搭建了基于SimuLink算法模型封裝的柔性機械臂動力學、路徑規劃、動量緩沖控制、姿態控制子系統和基于VS & STK的姿軌仿真子系統。各個子系統的各種算法均可以基于SimuLink進行構建封裝,具有模塊化的特點,便于封裝或者替換成其他算法。
由于本文構建的仿真系統各個子系統之間以TCP/IP的方式進行數據交互,在數據交互實時性上還有改進空間,這也是下一步研究的重點。
[1] 張文輝, 葉曉平, 季曉明, 等. 國內外空間機器人技術發展綜述[J]. 飛行力學, 2013, 31(3): 198-202
ZHANG W H, YE X P, JI X M, et al. Development summarizing of space robot technology national and outside[J]. Flight Dynamics, 2013, 31(3): 198-202
[2] 聞新, 李東江. 美國自主交會技術驗證衛星[J]. 中國航天, 2006(12): 31-34
WEN X,LI D J. US autonomous rendezvous satellite DART[J]. Aerospace China, 2006(12): 31-34
[3] MEIROVITCH L, LIM S. Maneuvering and control of flexible space robots[J]. Journal of Guidance Control & Dynamics, 1994(3): 23-40
[4] ROMANO M, AGRAWAL B N, BERNELLIZAZZERA F. Experiments on command shaping control of a manipulator with flexible links[J]. Journal of Guidance Control & Dynamics, 2002, 25(2): 232-239
[5] OTSUKI M. Flexible space robotic manipulator with passively switching free joint to drive joint[C]//IEEE International Conference on Robotics and Automation. Anchorage, Alaska, 2010: 1169-1174
[6] ABIKO S, YOSHIDA K. Adaptive reaction control for space robotic applications with dynamic model uncertainty[J]. Advanced Robotics, 2010, 24(8/9): 1099-1126
[7] 潘冬. 空間柔性機械臂動力學建模分析及在軌抓捕控制[D]. 哈爾濱: 哈爾濱工業大學, 2014: 1-3
[8] 張曉東. 空間柔性機械臂控制策略研究[D]. 北京: 北京郵電大學, 2009: 145
[9] 董正宏, 王玨. 空間目標在軌軟接觸技術[M]. 北京: 國防工業出版社, 2017: 3-6; 66-72
[10] LIU Z, YANG F, DONG Z, et al. The design of space debris removed simulation system based on flexible arm[C]//International Conference on Advanced Robotics, IEEE. Hong Kong, 2017
[11] 徐文福. 空間機器人目標捕獲的路徑規劃與實驗研究[D].哈爾濱: 哈爾濱工業大學, 2007: 47-67
[12] YE X, DONG Z H, PAN Q, et al. Application of the IOCP in multi-domain modeling and simulation based on multiple interfaces of satellite[J]. Advanced Materials Research, 2014(1049/1050): 1923-1928
(編輯:張艷艷)
Construction and simulation of the attitude and orbit control model for space debris removal with flexible arm
LIU Zhiwei1, DONG Zhenghong2, YE Xin1, YANG Fan2
(1. Graduate School,Space Engineering University; 2. Department of Space Information,Space Engineering University: Beijing 101416, China)
To establish a system model for simulating a space robot with a flexible manipulator to capture the space debris, this paper proposes a typical flowchart for the whole process, including the phases of the orbit transfer, the station keeping, the path planning, and the momentum stability control. According to the flowchart, the path planning, the momentum buffering control, the attitude control, the dynamics and the trajectory simulation subsystem are implemented with the SimuLinK software. Those subsystems exchange data based on the TCP/IP, for the construction of the attitude and orbit control simulation system of the space debris removal with a flexible arm.
flexible arm; space debris removal; attitude and orbit control; system simulation
V11
A
1673-1379(2018)02-0141-07
10.3969/j.issn.1673-1379.2018.02.007
劉志威(1993—),男,碩士研究生,主要研究領域為空間機器人控制;E-mail: lzw2800@163.com。指導教師:董正宏(1977—),男,博士學位,副教授,主要研究領域為空間機器人控制。
2018-01-18;
2018-03-09
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19