全自動無人駕駛車輛基地總平面布置方案探討
2018-05-05 07:47:58李致勇
科技與創新 2018年9期
關鍵詞:區域
李致勇
(中鐵工程設計院有限公司,北京 100039)
1 概論
隨著我國城市軌道交通的不斷創新與進步,全自動無人駕駛系統應運而生,成為軌道交通領域發展的新方向。根據城市的用地及軌道交通線網情況,需要設置相應的車輛段及停車場。車輛段(停車場)是保證地下鐵路工程正常運營的后勤基地,其總平面布置需求隨全自動無人駕駛系統的出現變得越來越高,稍有不周,將直接影響車輛段的運營效率。所以,如何合理利用有限的土地資源,滿足工藝需求,并完成總平面設計布局,成為軌道交通領域的重要和前沿問題。
2 案例分析
2.1 閻村北停車場工程概況
以北京地鐵燕房線車輛基地——閻村北停車場為例,對其總平面布置方案進行研究和分析。燕房線是國內首條自主研發的無人駕駛系統運行的地鐵線路,其起點為燕化產業基地內的洪寺站,終點為車輛段站。線路全長16.7 km(含房山線西延伸段2.2 km),均為高架線,共設8座車站。在車輛段站北側設閻村北停車場。閻村北停車場場址位于既有房山線閻村車輛段以北、京石高速以西、六環路以東、東沿村新村以南所圍的狹長地塊,東西長約990 m,南北寬160 m,地勢較為平緩,面積約14.3 hm2。閻村北停車場場址見圖1.
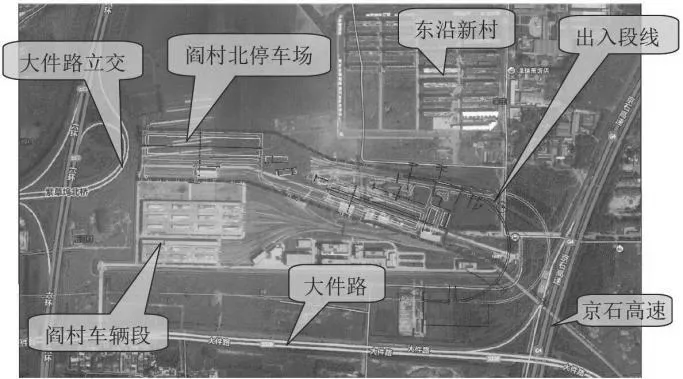
圖1 閻村北停車場位置圖
2.2 閻村北停車場總平面布置方案分析
受用地條件的限制,本方案采用“倒裝”方式布置,將聯合檢修庫及停車列檢庫分別布置于場地的東西兩側,洗車庫與停車列檢庫平行并列布置于場地西側,鏇輪庫單獨布置在停車列檢庫南側,聯合檢修庫相對于出入場線和停車列檢庫呈現倒裝布置形式,位于場地東側;物資庫布置于場地東南角靠近場區出入口的位置,以方便運輸,停車場其他區域還布置有工程車庫、工務料棚、易燃品庫等生產類設施。
綜合樓由辦公樓、信號樓、綜合維修中心、司乘公寓、食堂等組成,食堂單獨設置并通過連廊與綜合樓相接,設在場地東側、咽喉區南側。鍋爐房及水泵房、牽引變電站布置在生活區西側。污水處理站、蓄水池布置于辦公生活區域東側。閻村北停車場總平面布置圖見圖2.

圖2 閻村北停車場總平面布置圖

圖3 閻村北停車場全自動無人駕駛分區示意圖
其中,洗車作業、停車列檢作業為無人區作業,其他區域為人工作業區,因此本方案將洗車庫與停車列檢庫布置于全自動無人駕駛區域,其他庫線布置于人工駕駛區域,轉換區域布置在咽喉區靠近生活區位置,方便司機上下車作業。具體分區情況如圖3所示。
閻村北停車場的設計理念結合了實際用地情況及全自動無人駕駛的要求,司機可通過轉換區作業實現車輛有人無人駕駛的轉換。該停車場的方案設計為國內其他全自動無人駕駛車輛基地的總平面設計提供了依據和參考。
2.3 歇甲村車輛段工程概況
北京地鐵17號線位于北京市東部地區,線路南起通州區,環渤海總部基地——亦莊新城站前區,北終昌平區未來科技城地區。線路串聯了通州、東城、朝陽、昌平4個行政區,總長49.97 km。新建歇甲村車輛段及次渠南停車場各一座,歇甲村車輛段位于昌平區天通苑東側的歇甲村地區,停車場位于通州區南部的臺湖地區。歇甲村車輛段承擔17號線全線配屬列車的架修,部分配屬列車的月檢、臨修、運用、清洗、鏇輪任務。車輛段選址位于歇甲莊規劃一路南側,避開占用北側的非建設用地,場地西鄰北苑東路,東鄰濱河路,南側為歇甲村。選址現狀地塊主要是歇甲村村民住宅及少量鄉鎮企業房屋,其余為農田場地,中間有一排220 kV的高壓線穿過,場地東側有一排500 kV的高壓線。歇甲村車輛段選址地塊現狀衛星圖見圖4.

圖4 歇甲村車輛段選址地塊現狀衛星圖
2.4 歇甲村車輛段總平面布置方案分析
歇甲村車輛段采用全自動無人駕駛,并進行上蓋物業開發。在滿足車輛段功能的前提下,結合全自動駕駛,根據用地范圍及地塊與周邊現狀、規劃道路的位置關系,進行總平面布置。
運用庫(含洗車庫、停車列檢庫、鏇輪庫)與聯合檢修庫采用“順裝”方式并列布置在車輛段地塊的東側。試車線布置在聯合檢修庫的北側。工程車庫及工務料棚布置在聯合檢修庫的西側,物資總庫布置在工程車庫及工務料棚的西側。綜合辦公樓、司乘公寓、牽引降壓混合變電所、消防泵房等組成廠前區,布置在咽喉區與試車線之間。在出入段線U型槽的南側布置了洗車的牽出線,洗車庫的牽出線南側布置了帶有卸車線的卸車場地(兼焊軌場地)。在八字線的U型槽北側布置了全自動、非全自動轉換的牽出線,在牽出線北側布置了特種車的維保基地。歇甲村車輛段總平面布置圖見圖5.
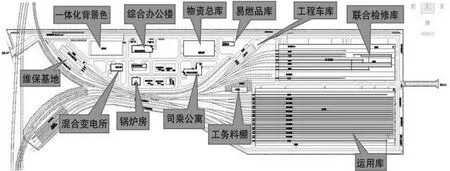
圖5 歇甲村車輛段總平面布置圖
本方案總平面布局劃分為全自動運行區和非全自動運行區。停車列檢庫和洗車庫布置在全自動運行區,其余布置在非全自動運行區,全自動運行區域設鐵路柵欄實現區域的物理隔離。在八字線U型槽的北側設置了全自動、非全自動轉換的轉換區域,靠近廠前生活區,方便司機上下車作業。歇甲村車輛段全自動無人駕駛分區示意圖見圖6.歇甲村車輛段的設計同樣需要全自動無人駕駛,其檢修規模及占地面積都比閻村北停車場大,并采用并列式總平面布置方式,與閻村北停車場“倒裝”式總平面布置形成鮮明的對比。

圖6 歇甲村車輛段全自動無人駕駛分區示意圖
3 結論
本文通過閻村北停車場與歇甲村車輛段設計方案的對比分析,分別介紹了車輛基地“倒裝式”平面布局和“并列式”平面布局在全自動無人駕駛前提下的功能分區情況,可以得出以下結論:①要實現車輛基地全自動無人駕駛的功能,其總平面設計就需要有明確的功能分區,即全自動區域(無人駕駛區域)和人工駕駛區域(非全自動區域)。②咽喉區線路布置需要設計單獨的轉換軌區域。③車輛基地內各部分功能分布明確,工藝流程順暢,相互干擾較小。生活區房屋集中布置,合理利用土地。④無人駕駛區域需設置隔離設施,實現區域的物理隔離。⑤廠前生活區靠近人工駕駛區域并盡量遠離全自動無人駕駛區域。
參考文獻:
[1]李桂桂,馮太群.地鐵車輛段站場設計相關問題研究[J].鐵道標準設計,2012(3):102-104.
[2]北京城建設計研究總院有限責任公司,中國地鐵工程咨詢有限責任公司.GB 50157—2013地鐵設計規范[S].北京:中國建筑工業出版社,2013.
[3]張雄.論地鐵車輛段總平面設計的特點及其優化[J].鐵道工程學報,1999(3):91-93.
[4]蘭淑桂.地鐵車輛段站場設計有關問題的解決方法[J].鐵道工程學報,2010(6):119-122.
猜你喜歡
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
科學(2020年5期)2020-11-26 08:19:22
軟件(2020年3期)2020-04-20 01:45:18
商周刊(2018年15期)2018-07-27 01:41:20
敦煌學輯刊(2018年1期)2018-07-09 05:46:42
北京教育·普教版(2017年1期)2017-02-05 13:26:23
新疆農墾科技(2016年2期)2016-08-21 13:50:16
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
新疆財經大學學報(2015年3期)2015-12-10 03:49:15