康復機器人在平衡訓練中的應用現狀及優化方案
2018-05-07 06:39:44韋宇煒何梓秋何漢武王俊華曾科學
裝備制造技術 2018年2期
韋宇煒,何梓秋,何漢武,王俊華,曾科學
(1.廣東工業大學,廣東 廣州 510006;2.廣東省第二中醫院,廣東 廣州 510095)
0 引言
腦卒中傳統的康復治療分為急性期的康復治療和恢復期的康復治療。恢復期的康復治療按照順序分為:床上訓練、坐起及座位平衡訓練、從座位到站起訓練、站立及站立平衡訓練、步行訓練、上肢及手功能訓練、作業治療訓練等。其中,平衡訓練占有非常重要的地位。平衡能力作為行走功能的基礎,對于患者的站立行走康復有極大的幫助,是康復治療中極其重要的一環。
對于平衡康復的訓練,一種方法是通過單獨訓練患者的平衡能力,使患者在無平衡能力狀態下逐步實現靜態平衡,進而實現自動態平衡和他動態平衡,此種設備的評估參數主要為平衡能力參數,在患者達到平衡能力要求后可能還需要進一步對步態進行訓練。另外一種方法則主要體現在下肢訓練方面,使患者在下肢康復的過程中逐步掌握平衡的能力和技巧[1],達到平衡與行走同步進行的效果,訓練效率較高。
本文通過介紹目前市面上的幾種較先進的下肢康復訓練機器人,分析目前下肢康復機器人在平衡康復訓練中所存在的不足。以消除目前所存在的不足為目標,設計出一套優化方案,使下肢康復機器人運用于平衡康復訓練時更加具有通用性和有效性。
1 平衡康復訓練機器人的研究的現狀
康復機器人的研究真正起步于20世紀80年代,到90年代得到了全面的發展。美國、英國、日本、德國等國家在康復訓練機器人領域有著最領先的研究,而我國研究工作起步較晚,現處在初步發展階段,不過目前清華大學、上海交通大學、復旦大學、哈爾濱工業大學等多家大學已經開展關于康復訓練機器人的研究[2]。下文將介紹幾種較典型的用于平衡康復訓練的機器人。
Betec公司生產了一種Bertec's Balance Check TM系統平衡臺,如圖1所示,可以用于平衡失調病人康復訓練以及運動員訓練以提高自身競技水平,該平衡板可以測量垂直方向的力和中心壓強(CoP)。設備可以像地毯一樣鋪在地板上,易于操作和使用,適用于身體姿態控制和其它人體平衡研究。Bertec平衡板可單獨使用或作為BalanceCheckTM系統的一部分使用。設備采用16-bit數字技術,通過USB數據線與安裝有數據采集軟件的計算機相連。可以用此設備作為一種研究工具,獲取相應信息。

圖1 Betec測力訓練平臺
德國生產的MEDICA主被動站立步行訓練系統BALANCE-Trainer可為病人提供部分或完全的靜態站立及安全的動態站立訓練,可根據病人情況調整訓練強度,基于隨機的訓練軟件,最大程度的激發病人潛在的站立,平衡及認知功能,如圖2所示。此系統具有七級可調的訓練強度和傾斜角度可調整的作業臺,能夠進行靜態站立、動態站立、穩定性訓練三種訓練模式,同時具有相應的站立穩定性評估訓練軟件,通過位移感應器可動態測量站立穩定性及軀干傾斜角度,給予評估結果。
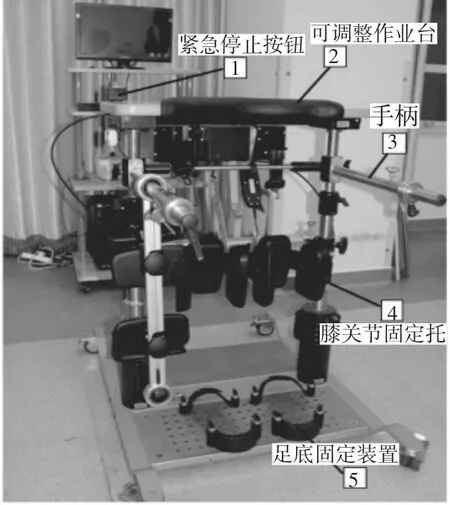
圖2 MEDICA測力訓練平臺
瑞士Kistier公司生產了一種測力平臺,如圖3所示。其便攜式鋁制板面用于測量地面反作用力、力矩以及壓力中心等生物力學指標。此測力臺主要在步態、平衡分析以及技術動作診斷和訓練監控中使用。它內置放大器產品,可以與所有常用運動學、生物學(肌電)采集分析系統同步使用。另外,此測力臺有較寬的量程(0~10kN),但其在整個應用范圍仍具有高精度和高線性度。另外,其具有對靜態負荷高達12 kN的超載保護保障。由于壓電式傳感器的特殊性能,測力臺具有很高的靈敏度,可以在測量較大量程同時測量微小的動態現象,在大量程時可以精確地測量到微小的力。
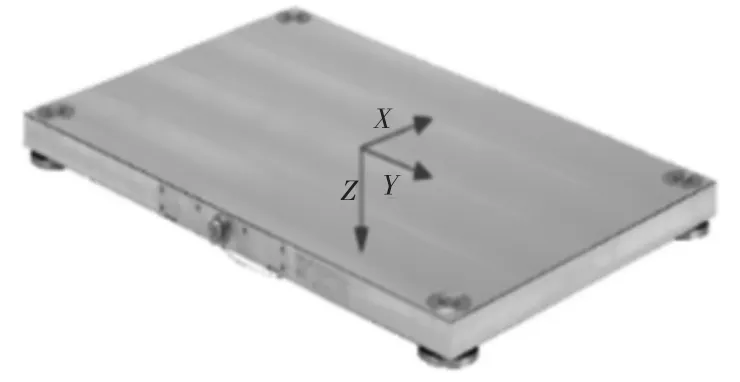
圖3 Kistier測力訓練平臺
除上述幾種平衡康復訓練機器人外,現在市面上還有瑞士的Lokomat[2]、日本的Makikawa等多種平衡康復訓練機器人,本文不再展開介紹。
2 平衡康復訓練機器人仍存在的問題分析
目前,平衡康復訓練機器人的發展已經由初步探索逐步走向智能化和人性化,國外發達工業國家已經將其作為一種產業并逐步實現了規模生產,而國內也正在由學術理論研究向市場生產靠攏,但根據上述國內外康復訓練機器人研究現狀的分析,仍然存在著很多不足的地方,需要進一步完善和改進。
(1)醫療機器人制造成本與可用性之間的矛盾
目前所制造的大型康復機器人成本一般較高,例如瑞士蘇黎世聯邦工業大學與hocoma公司合作研制了四自由度外骨骼式步態康復訓練機器人Lokomat,雖然已經有100多臺Lokomat系統在世界有名的康復醫院和研究所成功地投入使用[3],但其售價達300萬人民幣每臺,百萬元以上的價格,一些中小型醫院無力購買,個人用戶更是消費不起。很多醫院及康復機構還是難以承受;而價格適中的一些康復設備,僅僅是借助跑步機、懸吊系統等幫助患者進行康復訓練,這類康復訓練器械在康復訓練過程中可能還需要專業人員的幫助,還不能完全稱作平衡康復機器人。
(2)設備難以普及,后期維護維修困難
由于醫療器械市場準入制度嚴格,企業力所不及,大企業嫌棄高難度利潤低,且大型設備對于普通家庭安裝困難,使得下肢平衡康復訓練機器人普及于大多數患者家庭的目標在短期內無法完成;對于高端的下肢康復機器人,關鍵技術還不夠成熟,有些構造部件的生產來自于國外,具有技術保密權力;國內的生產廠家大多受困于規模,針對項目缺乏專項研究和后續開發,僅是仿造國外低端產品,導致設備故障后的維修困難,甚至出現無法維修的狀況。
(3)對患者肢體動作準確性量化困難
大多數下肢平衡康復機器人僅僅能夠對患者的動作做出一個記錄,但對患者的動作準確性難以判斷,如何對治療進行一個合理的評估還是需要醫師的指導,對患者動作是否標準和是否有進步評判不準確[4]。同時在患者的運動過程中,機器人對患者的誤操作和巧合性動作難以區分,致使評判結果不準確,可信度不高。
(4)康復訓練模式適用面較窄
患者的康復過程分為三個時期:康復初期,需要采用被動訓練模式;痙攣期,目的是緩解和消除關節痙攣,需要對患肢進行抗痙攣訓練[5];康復后期,關節分離運動已經完成,希望關節的協調性增強,機器人要能提供主動訓練模式。目前現有的康復機器人雖然能對下肢運動功能障礙患者進行訓練,但是大部分機器人僅僅針對某種特定病情的患者具有很好的康復效果,并不能適用于整個康復過程。
(5)用戶體驗感差,仿生性能不佳
雖然目前國內對下肢康復醫療機器人的研究日趨成熟,但在設備的推廣和普及方面較為困難,原因之一就是大多數機器人的康復訓練過程并不友好,患者穿戴時會感覺機器人到臃腫沉重,部分被動訓練機器人動作柔化性較差,適應性和體驗感不佳,加快患者訓練的疲勞感,降低患者訓練興趣。
另外,針對不同類型的康復訓練機器人,由于其在康復機理和運動控制方面各有不同[6],它們在目前使用過程中所表現出來的弊端也存在差異,具體分析如下:
(1)對于足底踏板式下肢平衡康復訓練機器人,其基本組成主要是兩套左右對稱布置的踏板機構,通過對正常人步行姿態的分析,來實現模擬人正常行走時足心的步態軌跡和足底姿態,并利用一些機械約束實現步行時腳部運動,故市場和社區常見的踏板式步行訓練機器人多采用曲柄搖桿機構,但是所生產的設備均將踏板直接固定在連桿上來帶動足底進行步行訓練,且踏板相對于腳掌為靜止狀態,無法對跖趾關節起到一個運動的作用,這種踏板姿態明顯與人正常步行時的足底運動姿態特征不符,若長期使用其進行訓練,會對患者的步行姿態習慣造成不良的影響,甚至阻礙患者的康復訓練過程。
(2)對于站立式減重步行康復機器人,其面向對象大多為運動、車禍、腦卒中、骨科疾病等原因導致的下肢運動功能障礙患者,由于他們下肢的承重能力較差,因此需要在減重方式下進行訓練。在目前所生產的康復機器人中,大多數方案均是采用單一固定框架加吊帶的懸吊減重系統,這種減重系統不具有自動調節減重大小的功能[7],故存在減重力大小不準確和操作繁瑣等問題,且由于吊帶的拉力過于集中,很容易會使患者感到不適,加快患者的訓練疲勞感,降低患者的訓練興趣。
3 優化方案
從以上問題可以看出,當前環境下,需要將現有的下肢康復機器人進行調整,以便其能更好地投入市場,總體優化方案如下:
(1)改進康復訓練機器人的材料和體積,以便其能適應個人使用,如可穿戴型康復設備[8,9]。
(2)降低康復訓練儀的開發成本,使其更快地普及于普通家庭。
(3)加強康復訓練儀的模塊化功能,做到集康復治療和輔助訓練與一體。
(4)尋找合理有效的評估方案,使其評價更具科學性和指導性。
(5)加強人機之間的互動體感[10],對患者的主動訓練和被動訓練能做出不同的反應,減少對患者的二次傷害。
另外,對于踏板式步態康復訓練機器人足部機構的優化,可以在足底主踏板驅動的基礎上,添加一個趾骨驅動機構,以便其能夠更符合人在行走時的步態動作,改進方案如下:
足部機構主要是由前腳板部分、后腳板部分、支撐柱部分、位置限制部分、彈簧拉回裝置組成前腳板和后腳板鉸接在一起構成轉動副。其結構如圖4所示。

圖4 足部機構優化設計圖
其特征是:前腳板部分主要是由前腳踏板(8)組成,在踏板底部固定有長彈簧軸(9),一端連接腳踏板凹槽部分,一端通過滑輪(10)與銷軸鉸鏈連接;后腳板部分主要是由后腳板踏板(16)組成,前腳踏板和后腳板踏板通過合頁(11)鉸接在一起,合頁通過緊固螺釘固定在前后腳踏板上,使得前后腳踏板有一定相對轉角,同時合頁的對轉角有一個限位作用。短彈簧軸(12)與長彈簧軸(9)通過彈簧相連,起到使腳踏板保持平面的作用。在腳踏板的運動過程中,前腳踏板繞著合頁的軸線運動,使得前后腳踏板形成一定的微小角度,達到趾骨在支撐期的彎曲效果;位置限定槽的槽面呈一定的角度,以達到真實的體現趾骨彎曲的角度。
4 總結與展望
下肢平衡康復訓練機器人作為下肢康復治療的一種有效手段,能夠在一定程度上減輕人工負擔,幫助患者快速康復,提高患者在康復訓練過程中的興趣[11]。因為其良好的臨床使用效果,引起了國內外學者的廣泛關注,因此在近幾年得到了較快的發展。但由于目前的康復訓練機器人均存在一些不足,在使用中均具有各自的局限性。因此,需要進行相關技術的攻關。國內外眾多學者正在進行大量相關研究,旨在設計出更合理、更有效、更舒適的平衡康復訓練機器人。因此,下肢平衡康復訓練機器人有著廣闊的發展空間和良好的應用前景,值得進一步開發研究。
參考文獻:
[1]劉洪濤.截癱患者下肢康復機器人設計與實驗研究[D].秦皇島:燕山大學,2010.
[2]Magagnin Valentina,Porta Albert,Fusini Laura,et al.Eval uation of the autonomic response in healthy subjects during treadmill training with assistance of a robot-driven gait ortho sis[J].Gait&Posture,2009,29(3):504-508.
[3]Hocoma AG.LokomatRehabilitation Device [EB/OL].Volketswil,Switzerland:Hocoma AG Medical Engineering,2018[2018-03-12].https://www.hocoma.com/solutions/lokomat.[4]Galen S.S.,Clarke C.J.,Allan D.B.,et al.A portable gait assessment tool to record temporal gait parameters in SCI[J].Medical Engineering&Physics,2011(33):626-632.
[5]Deaconescu T,Deaconescu A.Pneumatic Muscle Actuated Isokinetic Equipment for the Rehabilitation of Patients with Disabilities of the Bearing Joints[C]//The International Multi Conference of Engineers and Computer Scientists.Hong Kong:IMECS,2009:21-25.
[6]Krebs H I,Volpe B T,Aisen M L,Hogan N.Increasing productivity and quality of care:Robot-aided neuro rehabili tation[J].Journal of rehabilitation research and development,2000,37(6):639-652.
[7]Ikeuchi Y,Ashihara J,Hiki Y,et al.Walking assist device with body weight support system[C]//2009 IEEE/RSJ Interna tional Conference on Intelligent Robots and Systems.St.Louis,MO,USA:IEEE,2009:4073-4079.
[8]AdamZoss,Kazerooni H,Chu Andrew.On the Mechanical Design of the Berkeley Lower Extremity Exoskeleton(BLEEX)[C]//The 2005 IEEE International Conference on Robotics and Automation.Barcelona,Spain:IEEE,2005:4338-4344.
[9]Sankai Yoshiyuki.Leading Edge of Cybernics:Robot Suit HAL[C]//SICE-ICASE International Joint Conference 2006.Busan,Korea:SICE-ICASE,2006:18-21.
[10]楊燦軍,陳 鷹,路雨祥.人機一體化智能系統理論及應用研究探索[[J].機械工程學報,2000,36(6):42-47.
[11]錢振美.臥式下肢康復機器人的研究[D].哈爾濱:哈爾濱工程大學,2006.
猜你喜歡
車主之友(2022年6期)2023-01-30 07:58:16
廣東醫科大學學報(2020年6期)2020-02-06 06:00:56
黃河之聲(2019年23期)2019-12-17 19:08:43
汽車實用技術(2019年17期)2019-09-21 03:46:32
特別健康(2018年2期)2018-06-29 06:13:44
黃河之聲(2017年13期)2017-01-28 13:30:17
教育界·下旬(2016年4期)2016-11-19 22:15:52
中國衛生(2014年6期)2014-11-10 02:30:50
中國中醫藥現代遠程教育(2014年23期)2014-03-01 04:33:45
中國中醫藥現代遠程教育(2014年22期)2014-03-01 04:33:14