基于二維連續元胞自動機的交通流仿真分析
2018-05-17 08:57:19
福建質量管理 2018年9期
(重慶交通大學交通運輸學院,山地城市交通系統與安全重點實驗室 重慶 400074)
一、研究的意義
國內外應用元胞自動機研究交通流的文獻非常豐富,但大部分都是基于傳統的元胞自動機[1]進行研究。傳統元胞自動機模型中,道路按照一定長度d沿車道中心線方向(x方向,以下簡稱為縱向)被劃分為多個離散的單元(元胞),每個元胞中儲藏著包括有無車輛等信息的數值,這些數值按照設定的規則進行更迭變化。以道路片段為元胞的描述如下圖所示。

在此的基礎上,?znur Yeldan提出了一種連續型元胞自動機[2],在模型中舍棄了傳統元胞自動機將道路片段作為元胞的思路,而代之以道路中的車輛為元胞,實現了車輛沿道路中心線方向位移、速度描述的連續性(我們稱之為一維連續元胞自動機)。以車輛為元胞的描述如下圖所示。

但不管是傳統元胞自動機還是一維連續元胞自動機,在與車道中心線垂直方向(y方向,以下簡稱為橫向)上車輛相對于車道中心線偏移的數學描述仍顯不足。在實際的道路上,車輛不僅在沿道路方向上有位移變化,同時在道路垂直方向上也在發生某種隨機(車輛隨機偏離車道中心線)或者有目的(換道)的偏離車道中心線的位移dy,如下圖所示。

研究車輛相對于車道中心線橫向偏移的數學表達,構建車道縱向與橫向車輛運行狀態在空間上連續變化的元胞自動機模型(二維連續元胞自動機模型),將可以更加精細地刻畫交通流微觀運行特征,揭示城市交通行為、擁堵形成機理。這不僅在學術研究上豐富該領域的研究成果具有重要研究意義,也在交通管理科學決策提供技術支撐上具有重要的現實意義。
二、國內外研究現狀
利用傳統元胞自動機模型研究交通流的文獻非常豐富。基于由Nagel等提出的NaSch模型[1]后,Biham[3]等提出了城市交通流模型,即車輛僅由一個元胞跳向另一個相鄰元胞內這種簡單的CA模型(即BML模型)。2008年,Somayy-eh Belbasi1[4]等利用元胞自動機模擬了信號交叉口的交通流,對信號交叉口的信號配時進行了優化。2013年,Kohei Arai[5]等利用元胞自動機對駕駛員意識范圍內的換道行為進行了研究,研究結果表明該模型捕獲車道變更操作的重要特征,并且顯示了車道變更操縱的結果。2014年,徐洪學[6]等提出了一種更符合實際情況的改進的彈性安全換道間距規則,并建立了基于該規則的雙車道元胞自動機交通流模型,研究表明該模型有益于提高道路資源利用率,同時在安全方面能夠降低事故發生的可能性。2015年,Zheng Wei-Fan[7]等建立了隨機變量概率下的元胞自動機交通流模型,與傳統的細胞自動機模型相比,該模型更適合于基于實際交通中車輛和交通狀況的駕駛員的隨機決策過程。2016年,Han-Tao Zhao[8]等做了考慮行人過街的城市道路交流的元胞自動機模型,提出的模型重建了交通流的特點與行人交叉的情況,可以為城市交通管理提供一些實用參考。2017年,Jingxu Chen[9]利用元胞自動機對街道停車對道路交通流的影響進行研究,研究結果有助于關于路邊停車場的政策和設計,以提高交通運行的效率。傳統元胞自動機在交叉口渠化、紅綠燈配時、道路交通流仿真、道路施工或交通事故對交通流影響等方面的研究已有取得豐碩成果,但由于傳統元胞自動機對車輛運行速度、加速度、位移等參數的描述是離散的,這使得其對微觀交通流的仿真在細節上有所欠缺。
2012年?znur Yeldan[2],首次提出了一種基于模糊決策的連續型元胞自動機模型,打破了傳統元胞自動機的車輛位移離散性特點,使交通流更符合實際的情況,引起該領域學者關注。2015年,Marcelo Zamith[10]等建立了基于駕駛員交通行為的連續隨機元胞自動機模型,采用隨機概率模型,對道路交通流的狀況進行了分析。2016年,Kelvin N.S.Heeroo[11]等建立ludo連續元胞自動機模型對微觀交通流進行研究,提供一個魯棒和靈活的算法,增強交通流量精度和計算效率。2017年,Fei Yan[12]等將連續性元胞自動機和非連續性元胞自動機做了比較,研究了方案收斂性,得到最大計算效率,計算量大大提高。
然而,一維連續元胞自動機雖然實現了車輛沿車道縱向速度、加速度、位移等參數由離散變化向連續變化的突破,但與傳統元胞自動機一樣,二者在車道橫向變化仍然是跳變(離散)的,這也使得其在對交通行為(如車輛換道、橫向偏移)的精細刻畫仍顯不足。本課題將在一維連續元胞自動機交通模型基礎上,研究橫向變化的數學表達,建立車輛在車道上橫向與縱向關鍵參數(如位移)均能實現連續變化的二維連續元胞自動機交通模型。
三、研究內容
本文在充分把握國內外元胞自動機交通模型研究現狀基礎上,借鑒一維連續元胞自動機建模思路,構建二維連續元胞自動機交通模型。具體內容如下:
(一)二維連續元胞自動機單車道交通模型構建與仿真對比研究
傳統元胞自動機將車道離散化為片段(元胞),對元胞中的車輛做離散的形如vn→min(vn+1,vmax)的加速、vn→min(vn,(Δx)n-1)的減速、依概率的vn→max(0,vn-1)隨機慢化等仿真,實現車輛位置的離散更新xn→xn+vn,車輛在行駛方向上的變化是離散的。借鑒傳統元胞自動機建模思路,?znur Yeldan以車輛為元胞,提出了一維連續元胞自動機單車道交通模型,實現車輛沿道路縱向行駛過程中速度、加速度、位移等參數在駕駛員模糊決策行為等影響下的連續變化。其速度與位置如下式連續變化。
xi(t+1)=xi(t)+vi(t+1)
駕駛行為決策的數學描述如下圖所示。
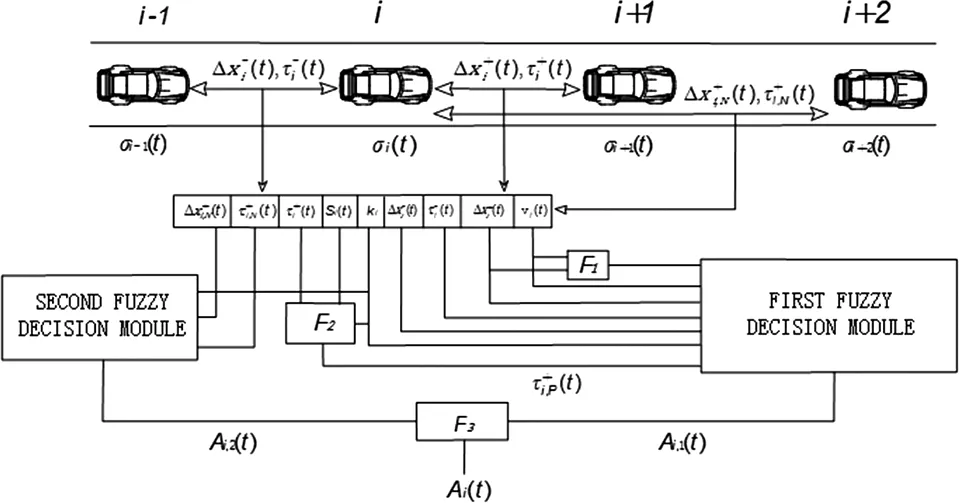
然而駕駛員會受到具體路況、前后車輛行駛狀況、路寬及周圍環境影響,使得車輛的運行軌跡并非沿道路中心線所形成的直線,而更多可能為如下圖所示的不規則曲線。

在本部分研究中,課題組將借鑒一維連續元胞自動機的建模思路,以上述決策模型為基礎,對車輛的橫向位移行為進行細致刻畫,建立二維連續元胞自動機單車道交通模型。并就一維連續元胞自動機與二維元胞自動機單車道交通模型進行仿真實驗,對比分析研究車輛橫向位移行為對交通流特性的影響。二維連續元胞自動機單車道交通模型的構建及Matlab仿真程序實現將為二維連續元胞自動機多車道交通模型構建及仿真對比研究奠定基礎。
(二)二維連續元胞自動機多車道交通模型構建與仿真對比研究
在單車道模型研究基礎上,?znur Yeldan所構建的一維連續元胞自動機多車道交通模型增加了多車道情況下會出現的如下式所示的換道行為的數學刻畫。
di(t+1)=Eval(L,R)(ki,vi(t),si(t))
si(t+1)=AddStr(ki,si(t),vi(t),vi+1(t),xi(t),xi+1(t))
然而,其換道行為的實現仍然是如下圖所示的非連續的在空間上的跳躍行為。

實際的換道行為是一個連續而復雜的過程。比如發表于《公路交通科技》的“城市快速路競爭與協作換道行為特征分析”中提到基于目標車輛和目標車道后車不同的交互行為,將傳統駕駛員換道過程分為自由換道、合作換道和強制換道3種。基于對我國的實證研究,構建了如下圖所示的復雜換道行為。

另外,車輛在行駛的過程中,也不可能一直縱向行駛在道路的中心線上,在行駛過程中會發生橫向偏移(甚至是壓線行駛),后車由于相鄰車道前車的橫向偏離其行駛的車道中心線(甚至跨線行駛)導致后車沿自己車道快速超車的空間距離d的寬度變窄(如下圖所示),這將可能對后車產生兩種影響:一是導致后車減速行為,二是導致后車向其左側發生偏移的駕駛行為。根據d的距離大小以及駕駛員的不同駕駛特征(激進和保守等)對后車產生的影響也不盡相同,車輛的壓線行駛以及偏移的位置,都會對后車的行駛速度產生一定的影響。

本部分將深入研究復雜換道行為及車輛橫向偏移對交通流特性影響的數學描述,建立二維連續元胞自動機多車道交通流模型。并就一維連續元胞自動機與二維元胞自動機多車道交通模型進行仿真實驗,對比分析研究不同模型對交通微觀機理在細節信息刻畫的差異。
【參考文獻】
[1]K.Nagel,M.Schrechenberg.A cellul arautomaton model for free way traffic[J].phys.I(France),1992:2221-2229
[2]?znur Yeldan.A Stochastic Continuous Cellular Automata Traffic Model with Fuzzy Decision Rules[D].Politecnico di Milano,2012
[3]O.Biham,A.A.Middletion,D.A.Levine.Self-organization and a dynamical transition in traffic flow models.Phys,Rev,A 46,1992:6124-6127
[4]Somayyeh Belbasi1,M Ebrahim Foulaadvand.Simulation of trafficow at a signalize-d intersection[J].Journal of Statistical MechanicsTheory and Experimen:An IOP and SISSA journal.2008(6)
[5]Kohei Arai,Steven Ray Sentinuwo.Effect of Driver Scope Awareness in the Lane Changing Maneuvers Using Cellular Automaton Model[J].(IJARAI)International Journal of Advanced Research in Artificial Intelligence,2013,7(2):10-15
[6]徐洪學,張冬梅.一種基于改進的彈性安全換道間距規則的元胞自動機模型[J].沈陽大學學報:自然科學版,2014,26(5):369-371
[7]Zheng Wei-Fan,Zhang Ji-Ye.A cellular automata model of traffic flow with variable probability of randomization[J].Phys B 2015 5(5)
[8]Han-Tao Zhao,Shuo Yang,Xiao-Xu Chen,Cellular automata model for urban road traffic flow considering pedestrian crossing street.Physica A:Statistical Mechanics and its Applications.Volume 462,15 November 2016,Pages 1301-1313
[9]Jingxu Chen,Zhibin Li,Hang Jiang,Senlai Zhu,Wei Wang.Simulating the impacts of on-street vehicle parking on traffic operations on urban streets using cellular automation.Physica A:Statistical Mechanics and its Applications,Volume 468,15 February 2017,Pages 880-891
[10]Marcelo Zamith,Regina Célia P.Leal-Toledo,Esteban Clua,Elson M.Toledo,Guilherme V.P.de Magalh?es,A new stochastic cellular automata model for traffic flow simulation with drivers’ behavior prediction.Journal of Computational Science,Volume 9,July 2015,Pages 51-56
[11]Kelvin N.S.Heeroo,Oomesh Gukhool,Dristesh Hoorpah,A Ludo Cellular Automata model for microscopic traffic flow.Journal of Computational ScienceVolume 16,September 2016,Pages 114-127
[12]Fei Yan,Peng-Zhi Pan,Xia-Ting Feng,Jia-He Lv,Shao-Jun Li.An adaptive cellular updating scheme for the continuous-discontinuous cellular automaton method.Applied Mathematical Modelling,Volume 46,June 2017,Pages 1-15
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
科技傳播(2019年22期)2020-01-14 03:06:54
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
汽車工程學報(2017年2期)2017-07-05 08:13:02
光學精密工程(2016年6期)2016-11-07 09:07:19
