無人機和地面三維激光掃描儀在1∶500城市基本地形圖測繪中的應用
2018-06-15 02:56:28傅詠冬
測繪工程 2018年5期
傅詠冬
(廣州市城市規劃勘測設計研究院,廣東 廣州 510060)
基礎測繪在國民經濟和社會發展中,起著基礎性、先行性、公益性的作用,為滿足廣州市城市規劃、建設和管理的要求,廣州市國土資源與規劃委員會委托廣州市城市規劃勘測設計研究院(簡稱我院),在城市基礎地形圖的“及時維護、周期更新、逐步擴大”的機制基礎上,常年對廣州市部分區域大比例尺地形圖開展測量與更新工作。在城市1∶500數字化地形圖測繪中,主要方式仍是全野外數字測圖,而且已形成非常成熟的生產流程。近年來,隨著科技的進步和對測繪需求的急劇增長,全野外數字測圖陸續引入了一些新方案、新手段,使測繪模式趨于多樣化、立體化,極大地提高了外業工作效率,降低勞動強度。
1 無人機成果的應用
隨著無人機技術的快速發展,無人機在測繪領域展現出了良好的應用前景。利用eBee無人機和中測新圖雨燕ZC-3無人機,搭載框幅式小像幅數碼相機,我院開展“無人機測制1∶500大比例尺地形圖生產體系建立研究”課題,依托無人機為主要的信息接收平臺,通過對無人機機載遙感信息的采集和處理,取得1∶500正射影像圖和數字線劃圖成果。
1.1 利用無人機航測生產1∶500 DLG產品
1.1.1 精度統計分析
將已有的全野外采集地形圖成果與無人機生產的地形圖成果進行疊加,采用同精度檢測。平面精度檢測方面,選擇122個點進行(X,Y)坐標值統計;高程精度檢測方面,選擇30個高程注記點進行高程值(H)統計,檢測精度情況如表1所示。
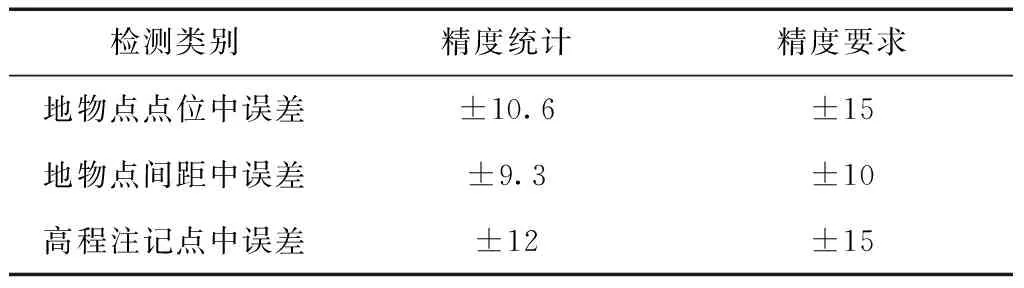
表1 檢測精度統計表 cm
統計顯示,利用無人機航測生產的1∶500 DLG產品,成果精度滿足我院1∶500地形圖精度指標。
1.1.2 生產效率分析
與傳統全野外測量方法相比,無人機航測生產雖然減少了外業工作量,卻加大了內業工作量。除平地、丘陵之類的簡單地形之外,其它復雜的被測地形,采用無人機航測生產1∶500數字線劃圖的方法,在作業效率上并無明顯優勢。
1.2 利用無人機航測輔助進行全野外測圖
在“無人機測制大比例尺地形圖生產體系建立研究”課題中,我院分別用eBee無人機和ZC-3無人機航攝,制作了1∶500正射影像圖成果共240幅,應用于全野外測圖生產中,取得了很好的效果。
正射影像圖輔助進行全野外測圖生產,可以應用于以下幾個階段,如圖1所示。
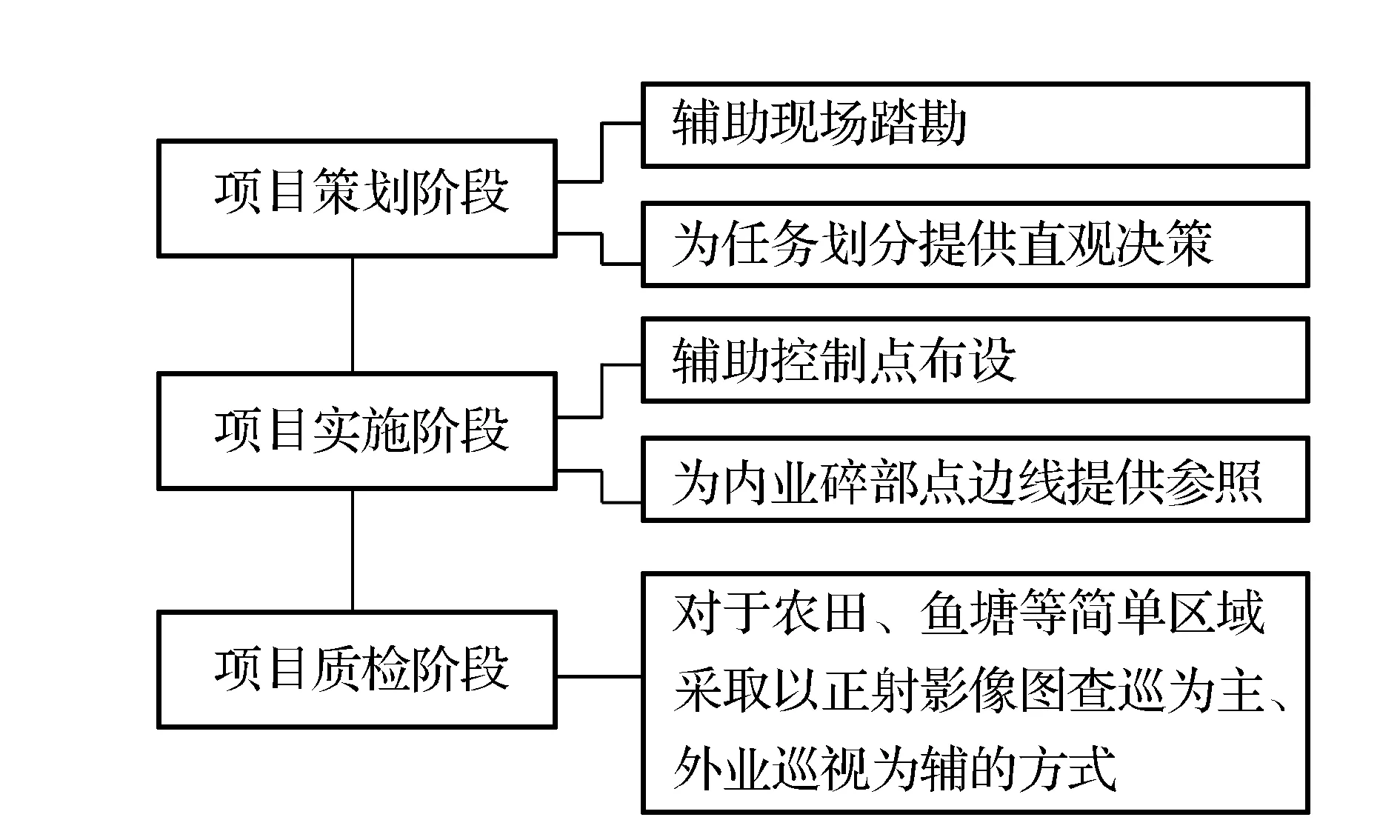
圖1 正射影像圖輔助測繪生產
利用無人機航測制作的1∶500正射影像圖(如圖2所示),由于具有分辨率高、現勢性強、制作成本低的優勢,無論在全野外數字測圖生產的初期、中期還是后期,都能發揮出獨特的作用,可提高作業效率和準確性。

圖2 無人機測制的1∶500正射影像圖
2 地面三維激光掃描儀的應用
地面三維激光掃描儀主要用于在全野外1∶500地形圖測圖成果質量檢測。我院的常規做法是采用人工方式進行外業巡查和設站檢查,需要投入較多的檢查人員,檢測效率較低,大規模數據生產過程中,容易形成疲于應付的局面。通過地面激光掃描技術,快速獲取三維點云數據,將這些點云數據加以處理,探索出一套基于地面激光掃描技術的測繪成果質量檢查的新體系,是我院的一個大膽嘗試,并初見成效。
依托點云數據,我院開發了“激光掃描成果質量檢查程序”,用來提高數據處理的效率。通過基于深度圖識別的建筑物角點提取算法和基于近鄰域分析的高程點擬合算法,實現地形圖建筑物角點檢測坐標和高程點檢測高程的快速提取。
測量成果精度檢測包括地理精度檢測和數學精度檢測,數學精度檢測又包括平面相對精度檢測、平面點位精度檢測和高程精度檢測。
2.1 地理精度檢測
由于三維點云具備“所見即所得”的特點,可以采用調整點云的顏色或疊加多個點云數據對比等手段,對地形圖的地理精度進行檢查,內容包括:地理要素的錯漏(如圖3、圖4所示)、地理要素類別的錯誤、樓房樓層的錯誤等。
2.2 相對精度檢測
在三維點云中,通過量測地物點的間距、地物的邊長等,進行平面位置相對精度檢測(如圖5所示)。可采取點到面、點到點的測量方式,也可采用剖切點云比較擬合線的方式。
2.3 平面點位精度檢測
深度圖高度和角度一般設置為100 m和180°,深度圖的設置參數與房屋角點自動提取的精度有關(如圖6所示)。
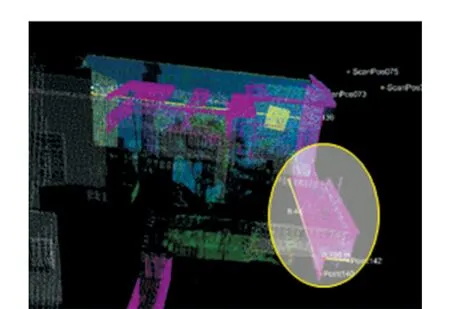
圖3 點云數據
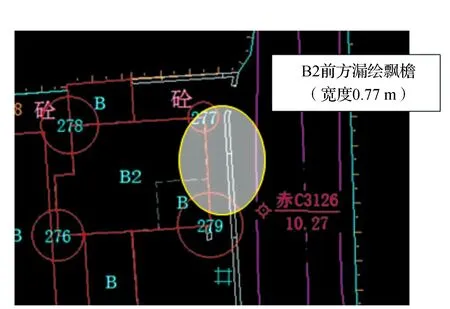
圖4 通過點云發現的漏繪飄檐現象
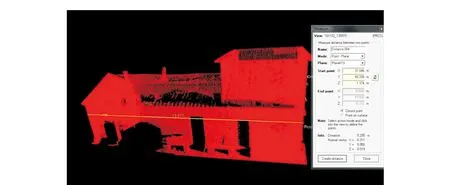
圖5 平面相對位置檢測
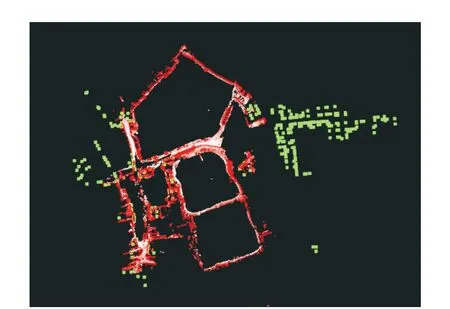
圖6 房屋角點的提取
2.4 高程精度檢測
利用基于近鄰域分析的高程點擬合算法,實現高程點高程的快速提取(如圖7所示)。取點范圍閾值一般設置為地形圖對應的平面精度,這里取0.05 m。
2.5 地面三維激光掃描技術檢查測繪成果質量的評價
利用點云數據檢測地形圖的測量成果精度,使得外業檢測的效率顯著提高,勞動強度極大降低;與已有地形圖相比較,檢測地物點點位中誤差為±6.4 cm、地物點間距中誤差為±5.5 cm、高程注記點中誤差為±8.6 cm,檢測精度滿足規范要求;在掃描作業時,同步采用RTK測量大量站心點坐標用于自我檢查,保證了較強的可靠性。
3 結束語
隨著測繪新技術的發展,將會有更多的新方法應用于城市1∶500數字化地形圖測繪。目前針對城市基礎地形圖,我院已搭建出地空協同的立體測繪新模式,相信在不久的將來,架構將會更豐滿、更高效。
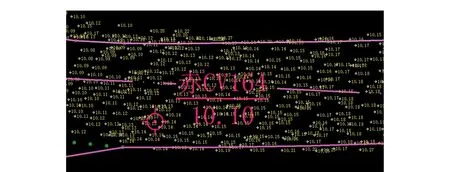
圖7 高程點高程的提取
[1] 陳天博,胡卓瑋,魏錸,等.無人機遙感數據處理與滑坡信息提取[J].地球信息科學學報,2017,19(5):692-701.
[2] 王楠.城市更新改造中的測繪技術應用[J].工程勘察, 2017(7):46-48.
[3] 宋輝.測繪無人機在大比例尺成圖中的實踐[J].測繪技術裝備,2015(2):77-79.
[4] 胡耀鋒,張志媛,林鴻.利用機載LiDAR測繪大比例尺數字地形圖的可行性研究[J].測繪通報,2015(5):87-90.
[5] 林鴻,歐海平,王峰.地面激光掃描技術在建筑變形測量中的應用探討[J].測繪通報,2016(6):73-76.
[6] 喻雄.機載激光雷達在山區高速公路勘測中的應用[J].測繪通報,2011(2):31-34.
[7] 肖煒枝.城市大比例尺地形圖數據更新方法及其應用[J].測繪通報,2016(9):127-129.
[8] 高志國,宋楊,曾凡洋.微型無人機航攝系統快速測繪小區域大比例尺地形圖試驗分析[J].工程勘察,2015(12):71-75.
[9] 林卉,王李娟,康志忠,等.三維激光掃描建筑物立面數據的自動提取[J].測繪通報,2016(10):25-30.
[10] 吳海新.測繪無人機在地質災害調查中的應用[J].世界有色金屬,2017(1):93-94.
[11] 車爾卓,詹慶明,金志誠,等.基于激光點云的建筑平立剖面圖半自動繪制[J].激光與紅外,2015,45(1):12-16.
[12] 劉洋,蘭澤英.基于同源數據的序列比例尺地圖綜合縮編平臺建設[J].測繪工程,2015,24(12):36-42.
[13] 鄭鳳嬌,王祥.武漢市系列比例尺基本地形圖的數據整合與縮編更新[J].城市勘測,2012(4):20-23.
[14] 趙小陽,孫穎.大數據背景下的城市大比例尺地形圖更新及應用探討[J].測繪通報,2016(2):116-119.
[15] 夏春林,王佳奇.3DGIS中建筑物三維建模技術綜述[J]. 測繪科學,2011(1):70-72.
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發展導向(2019年10期)2019-08-24 06:25:28
江西建材(2018年4期)2018-04-10 12:37:38
中國公共安全(2017年7期)2017-10-13 08:18:11
電子制作(2017年9期)2017-04-17 03:01:00