多傳感器信息融合在機器人技術中的應用
2018-06-17 11:16:48孫曉莉
無線互聯科技 2018年2期
關鍵詞:多傳感器
孫曉莉
摘 要:文章論述了多傳感器信息融合的特點及并對其融合方法進行了介紹,最后指出多傳感器信息融合技術在移動機器人和遙控操作機器等方面的應用與發展。
關鍵詞:多傳感器;機器人技術;信息融合
機器人技術是結合了多種技術的計算機自動控制系統。機器人有類似人的感覺能力和反應能力,能模仿人的聽覺、嗅覺、味覺從外界獲取信息。同時,它的動作要有一定的靈活性,能夠和人類一樣思考,在工作時必須完成自我控制和自我調節。在眾多機器人控制技術中,傳感器技術在機器人的控制中起到了至關重要的作用。傳感器及信息融合技術式機器人能夠全面獲取外界信息,并對這些信息加以壓分析判斷,從而做出正確的反應。機器人在感知外界環境時,首先要完成信息采集工作,而這項工作正是傳感器完成的。另外,傳感器采集到的信息量非常巨大,因此,要對多個傳感器獲取的各種環境信息進行加工和處理,選擇恰當的方法和技術才能使機器人按人們既定的要求進行智能作業[1],甚至完成人類不能完成的一些特殊任務。綜上所述,傳感器信息融合系統是現代智能機器人的重要組成部分,是機器人能否智能作業的關鍵所在。
1 多傳感器信息融合技術
機器人是通過傳感器得到感覺信息的。在連接外界環境與機器人的技術中,傳感器起橋梁作用,它就如同機器人的眼睛,是機器人獲取環境信息的窗口。機器人的關鍵之一是計算機控制技術,這種技術使機器人具備了類似人的肢體活動能力和思維能力,它的肢體動作靈活,能夠像人類一樣思考,能夠在無人操作的情況下獨立完成工作[1]。而機器人之所以能夠完成各種高難度的動作,傳感器的應用是關鍵因素之一。傳感器先完成信息采集,再將信息進行綜合處理,計算機自動控制系統最后完成對機器人各種動作的控制。傳感器信息融合技術又稱數據融合技術。傳感器要像人類的神經和感官一樣獲取各種宏觀和微觀信息,再將信息提供給計算機控制系統。信息融合技術將獲取的信息先做處理、再選擇合理的表示方法,并要找出個信息之間的聯系。這種技術是一種信息優化技術,它從不同角度對信息進行處理及比較,獲取不同信息之間的普遍規律,篩選出錯誤的和多余的信息,留下正確的和有用的部分,這就是信息的優化。它也為智能信息處理研究指出了新的發展方向。單一傳感器獲取的環境信息是缺乏準確性和全面性,因此,信息的采集必須由多個傳感器合作完成。將多種傳感器獲取的信息進行合成,才能完整、準確、客觀地刻畫外界環境的特點,也是多種信息綜合前預處理。通過信息融合技術處理后的信息具備了冗余性、互補性、實時性、信息獲取低成本性等特征。
2 多傳感器信息融合過程
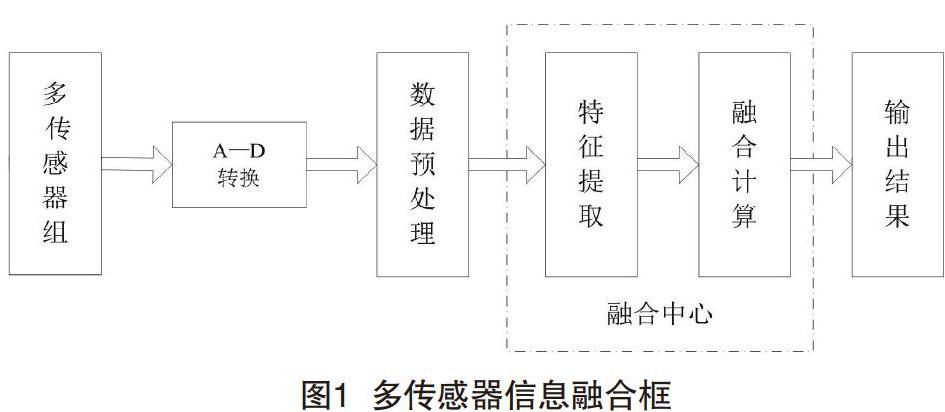
多傳感融合系統是一個復雜的信息系。各類傳感器獲取的信息都有各自的特點。這些信息有實時信號、非實時信號、快變或瞬變信號、緩慢變化的信號;確定的信號,模糊變化的信號[2]。這些大量的信息之間還有可能會相互制約,相互影響。多傳感器信息融合扮演了人類大腦的角色,它使用該系統中的各種傳感器資源,通過一定的算法合理地支配與使用多個傳感器獲取的信息。對時域和空間上的冗余信息和互補信息優化組合之后,也就完成了環境信息的更為精確的、全面的提取和描述。信息融合是對多種傳感器信息在幾個層次上進行處理的過程,每個層次都代表了不同等級的信息抽象過程。信息融合處理技術涵蓋了信號探測、信號互聯、信號相關、信號估計等。信息融合系統也可分為兩個層。即較低層是信號的特征提取和身份估計層。較高層次是整體戰略走向和戰術態勢估計。典型的多傳感器信息融合的組成框如圖1所示。
3 信息融合的分類和方法
傳感器信息融合技術可以分為信息組合、信息綜合、信息融合、信息相關等4個方面。信息組合是最基本的數據處理方式;為了獲取全面、準確的信息,可以選擇多傳感器平行輸出或互補輸出的方式。由于不同傳感器輸出方式有所不同,這就存在多種傳感器輸出方式的相互合作、綜合以及如何選擇性能優良的傳感器的問題。這幾個技術中的關鍵是綜合,綜合可以使信息明確化、準確化的等級提高。比如我們要對一個物體攝像,可以使用攝像機多次拍攝同一個物體的不同側面的圖像,再將這幾幅圖像的信息進行綜合處理,就能得到一個非常非常真實的、有立體感的物體圖片[2]。這要比單一圖片所表現出的物體的特征信息全面豐富得多。融合包括兩個方面:對傳感器輸出的各種數據進行相關;將傳感器數據與系統內部的已有的網絡模型進行相關。最后將相關的結果進行處理,生成一個新的信息表達式。信息相關處理的目的是對識別、預測、學習和記憶等過程進行綜合和優化處理。獲取傳感器數據組之間的相互聯系規律,保留正確的信息,剔除無用和錯誤的信息,直到機器人做出相應的判斷和反應。信息融合的層次化描述存在于各種實際環境中。融合處理方法就是數學加工和處理,使這些信息稱為計算機自動控制系統能夠處理的成分信息,同時完成信息數據的融合。能夠應用于多傳感器信息融合的數學理論和方法有很多。常用的方法是數理統計和概率理論以及構建人工神經智能網絡。概率統計方法主要是針對信息的不確定性進行研究,從大量的看似沒有規律的信息中找出各種信息之間的內在聯系。與概率統計有關的理論包括估計理論、卡爾曼濾波、假設檢驗、貝葉斯方法、統計決策理論以及其他函數變形方法;人工智能包括模糊邏輯處理學、人工神經網絡模型和專家系統等。此外,近10年來,研究者已經將自適應共振理論《Adaptive Resonance Theory, ART),自適應共振理論映射(Adaptive Resonance Theory Map,ARTMAP)和模糊自適應共振理論網絡( fuzzy-ART network)也應用于傳感器融合技術。這幾種新理論使融合之后的信息特征值能自動調整權值,并且能夠零點漂移以及靈敏度漂移影響,環境溫度變化時也能保持穩定的輸出。
4 信息融合的結構
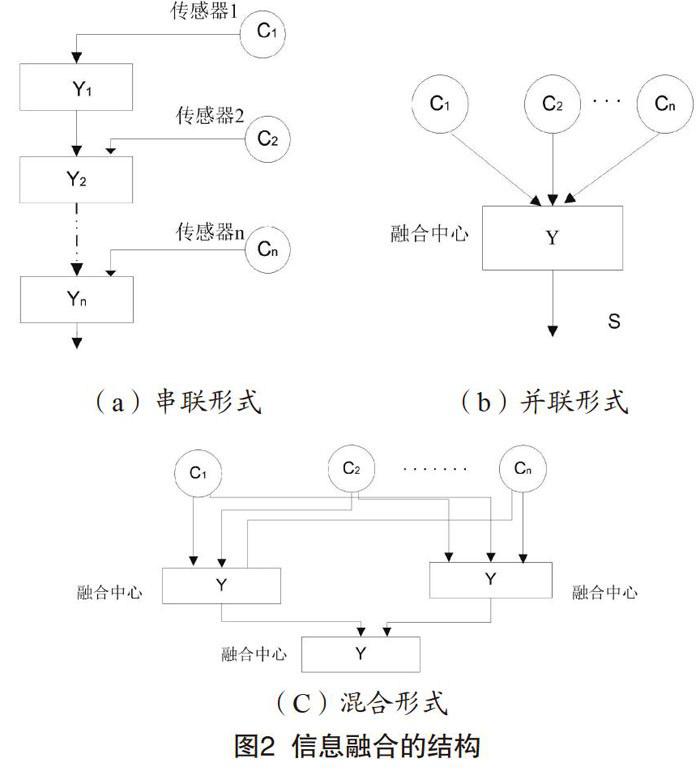
信息融合的結構的結構分為串聯、并聯和混聯3種,如圖2所示。
5 多信息融合的典型應用
信息融合技術已經廣泛應用在機器人技術中。由于移動機器人和遙控操作機器人的工作環境不是靜態的,包含很多不確定因素,結構特征也不明顯,所以他們是最先采用信息融合技術的機器人。此種技術是機器人具備了極高的自我管理能力和感知能力。同時還可以使機器人準確判斷實時自身條件,指導其身體作出正確的肢體動作。通過大量實驗汪明,采用單一傳感器機器人和使用多傳感器的機器人在感知外部環境的能力方面是不可比擬的。
RANGER是卡內基梅隆大學機器人研究所在90年代中期研究的一種可移動機器人。該研究所認為一幅圖像最重要的是圖像處理過程,并不是確定一個標準的圖像模型。特別在比較粗糙的地方,不同圖像的特征的變化很大,數學計算相當復雜,且計算量非常龐大,這就更需信息融合技術來確保特征模型的可靠性[3],也為機器人的安全性提供了保障。
LIAS是德萊克西爾大學研發的多傳感器移動式機器人。該機器人裝有3個不同的感覺系統。它的四周安裝了超聲波傳感器,前方安裝了一個特殊的“三聽覺”傳感器;機器人前面板突出的部分安裝了紅外線傳感器,這些傳感器能夠采集到完整的全景信息。這種機器人可以一次探測很多目標物體,輸出多種距離信息。例如測量被測物體相對于機器人的方向和距離等信息。在這項研究中,學者們從不同的角度對現有的信息融合方法加以應用,驗證了它的實用性和有效性[4]。
6結語
近些年來,傳感器及檢測技術的進步帶動了機器人技術日新月異的發展。而信息融合技術使人工智能領域得到了深入的關注和廣泛的應用。其理論和方法是智能信息處理的關鍵所在。本文概述了多種傳感器信息融合的方法、過程、結構等。在此基礎上,論述了信息融合技術在傳感器技術、計算機技術、智能控制技術,等方面的應用,展望了這一研究領域的發展方向。
[參考文獻]
[1]羅志增,蔣靜坪.機器人感覺與多信息融合[M]北京:機械工業出版社,2003.
[2]李磊,葉濤,譚民,等.移動機器人技術研究現狀與未來[J]機器人,2002(5):475-480.
[3]柳成林.智能機器人的發展及其產業化[J].科技導報,1998 (6):33-36
[4]蔡自興.中國的智能機器人研究[J]莆田學院學報,2002 (3):36-39
猜你喜歡
電腦知識與技術(2017年4期)2017-04-10 07:18:48
電子技術與軟件工程(2016年16期)2017-03-17 00:34:04
現代電子技術(2016年24期)2017-01-19 14:56:30
計算機應用(2016年12期)2017-01-13 20:34:22
現代電子技術(2016年22期)2016-12-26 09:49:39
電腦知識與技術(2016年12期)2016-06-14 01:29:49
科技視界(2016年14期)2016-06-08 13:24:00
現代電子技術(2015年14期)2015-07-22 22:03:52
物聯網技術(2015年5期)2015-07-18 13:08:22
現代電子技術(2014年24期)2014-12-18 11:53:51