DEM線狀窗口鄰域分析的月表撞擊坑自動提取
2018-07-03 04:39:40武金勇陜西師范大學地理科學與旅游學院陜西西安710119地理學國家級實驗教學示范中心陜西師范大學陜西西安710119華北水利水電大學藝術與設計學院河南鄭州450046
測繪通報 2018年6期
涂 杰,周 毅,趙 昊,燕 龍,武金勇(1. 陜西師范大學地理科學與旅游學院,陜西 西安 710119; 2. 地理學國家級實驗教學示范中心(陜西師范大學),陜西 西安 710119; . 華北水利水電大學藝術與設計學院,河南 鄭州 450046)
撞擊坑是小行星、彗星、隕石等小天體撞擊行星表面而形成的一種凹狀地形單元[1]。因月球無大氣、無水、無風等環境因素,月表撞擊坑得以較好的完整保存[2]。作為月球表面的一種主要地貌形態,撞擊坑的精準識別與統計分析對于人類研究月球地質運動和演化歷史等具有重要的意義[3]。由于月表撞擊坑的數目繁多、形態不一,目視解譯耗時高,效率低,因此撞擊坑的自動識別成為當前月球科學領域的研究基礎和關鍵。
撞擊坑的識別經歷了人工觀測手繪、遙感影像目視判讀和高分辨率數據自動提取3個階段[4]。從數據源來看,可將撞擊坑的識別方法分為3種類型:①基于月表遙感影像數據;②基于月表DEM數據;③基于影像與DEM融合數據。其中,第一種方法主要是利用撞擊坑在遙感影像上的灰度差異,在經過邊緣檢測[5-6]、紋理分析[7-8]等數據預處理后,運用面向對象[9-11]、Hough變換及其改進[12-13]、模板匹配[14-16]、機器學習[17-18]等方法自動提取撞擊坑[19]。這種方法對于灰度差異比較明顯的撞擊坑都能很好地提取出來。然而由于遙感影像數據固有的光學誤差及月表實際撞擊坑復雜的地形特征等影響,導致撞擊坑在遙感影像上出現幾何學畸變,增加了影像識別的不確定性。第二種方法主要是利用撞擊坑實際地形信息,使用Hough變換[1,20-21]、傅里葉變換[22]、機器學習[23-24]等方法提取撞擊坑[25]。相比于影像數據,DEM數據能夠再現撞擊坑的三維地形結構[26]且不受光照影響,基于DEM數據的撞擊坑識別方法能根據月表真實的地形形態正確提取撞擊坑。然而,由于早期月表DEM數據分辨率低及與之相關的技術水平的局限,許多撞擊坑不能準確有效地提取出來。近年來,隨著月表DEM數據分辨率的提高及地理信息系統技術的日趨成熟,諸多學者開始采用融合影像和DEM數據的方法提取撞擊坑[27-30],這種方法雖然在一定程度上提高了撞擊坑識別的準確性,但是由于影像數據和DEM數據不同的數據格式及不同分辨率的影響,二者不能有效地融合,并且通常適用于影像識別的方法不適合DEM數據的提取。
綜上所述,撞擊坑作為月表的一種典型月貌單元,高程是定量表達其形態特征最為基本的幾何量。因此,月表DEM數據所蘊含的撞擊坑結構和地形特征較影像數據更為豐富,DEM數據更適用于撞擊坑的自動提取[31]。本文基于美國LRO飛行器獲取的100 m分辨率月表DEM數據,采用線狀窗口鄰域分析方法準確提取撞擊坑邊界。
1 研究樣區與研究方法
1.1 研究樣區
月球表面主要由兩種地貌單元組成:月陸和月海[32]。基于地貌類型的完整性和算法的普適性原則,本文分別選擇月陸和月海兩個研究樣區(如圖1所示)。其中,月陸樣區位于LQ-6洪堡海和LQ-7達朗貝爾[33]交界的莫斯科海和洪堡海之間地區,與韋爾斯、達貝爾、達朗貝爾等大型撞擊坑相鄰,經緯度范圍為35°N—50°N、117°E—140°E,面積大約為314 400 km2。此研究樣區位于月球背面,撞擊事件頻繁,以大型撞擊坑為主。月海樣區位于LQ-4虹灣和LQ-11哥白尼交界的雨海地區,與風暴洋、澄海、虹灣等地區相鄰,經緯度范圍為29°N—44°N、10°W—33°W,面積大約為317 300 km2。此研究樣區位于月球正面,撞擊事件較背面少,撞擊坑多是由月海玄武巖經巖溶填充而成,以中小型撞擊坑為主。
1.2 研究方法
本文利用線狀窗口鄰域分析法(如圖2所示)[34]提取撞擊坑。地形特征線微分單元走向大致可分為4個方向:東西方向、南北方向、東北-西南方向、西北-東南方向。在DEM中,分析窗口可設定為水平方向上的1×n和垂直方向上的n×1的線狀鄰域分析窗口(n=3,5,7,…)。在基于DEM進行線狀窗口分析時,線狀分析窗口將遍歷整幅DEM,導致水平方向的分析窗口對大致南北方向的地形特征線具有過濾作用,而垂直方向的分析窗口對大致東西走向的地形特征線具有過濾作用。最后,對分別使用1×n和n×1的線狀鄰域分析窗口過濾后的結果求和即可得到潛在撞擊坑的坑唇線。
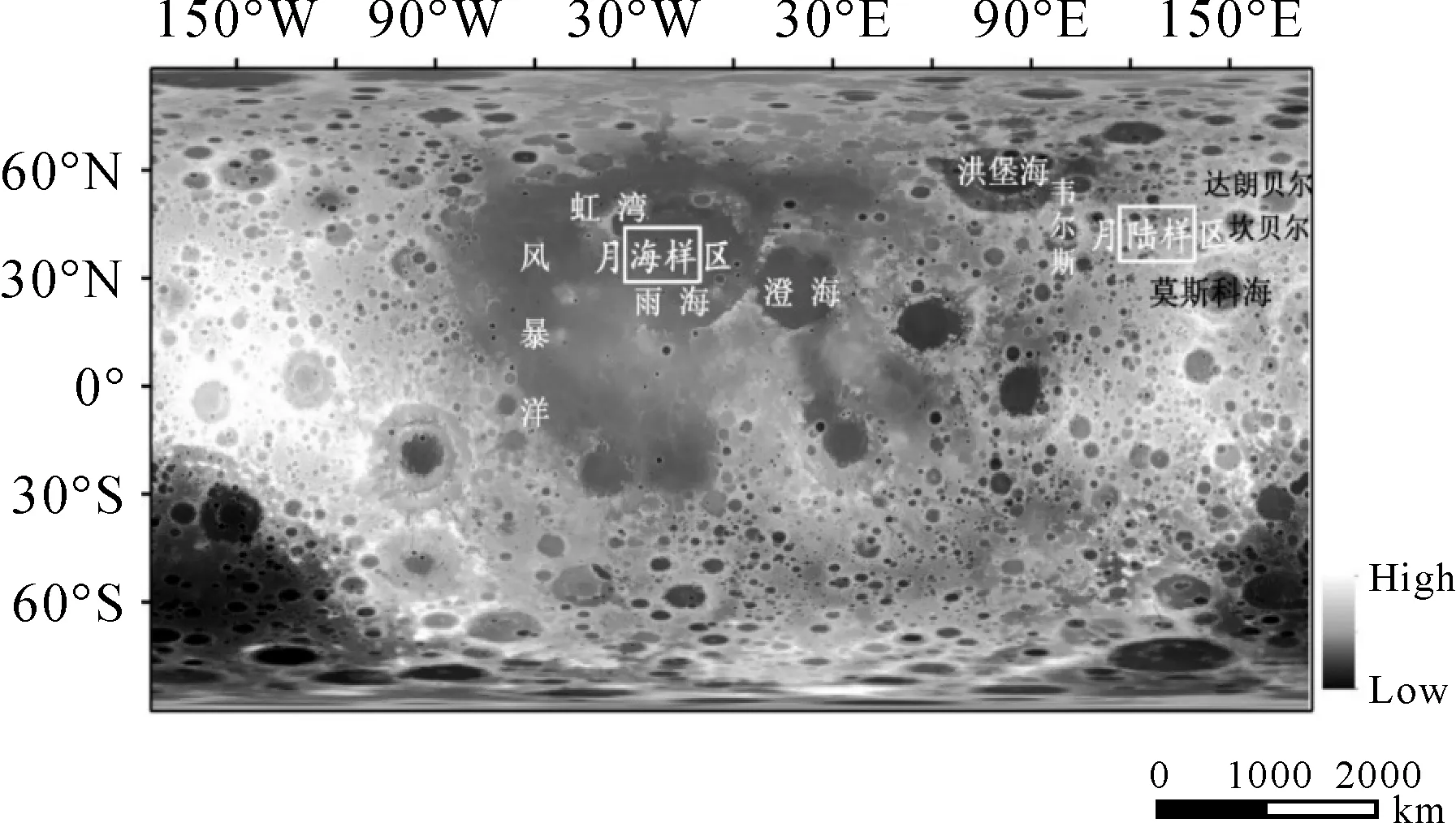
圖1 研究樣區概況

圖2 線狀窗口鄰域分析原理
撞擊坑自動提取流程如圖3所示。首先,對原始樣區DEM數據進行水平和垂直方向上線狀窗口的鄰域均值分析。給定一個閾值,將原始樣區DEM分別與水平和垂直方向均值分析后DEM進行柵格減運算并使其大于給定閾值;其次,將水平與垂直方向上的結果進行柵格加運算,將和值進行重分類二值化得到初步結果;最后,將二值化結果進行數學形態學處理,得到最終的月表撞擊坑提取結果。
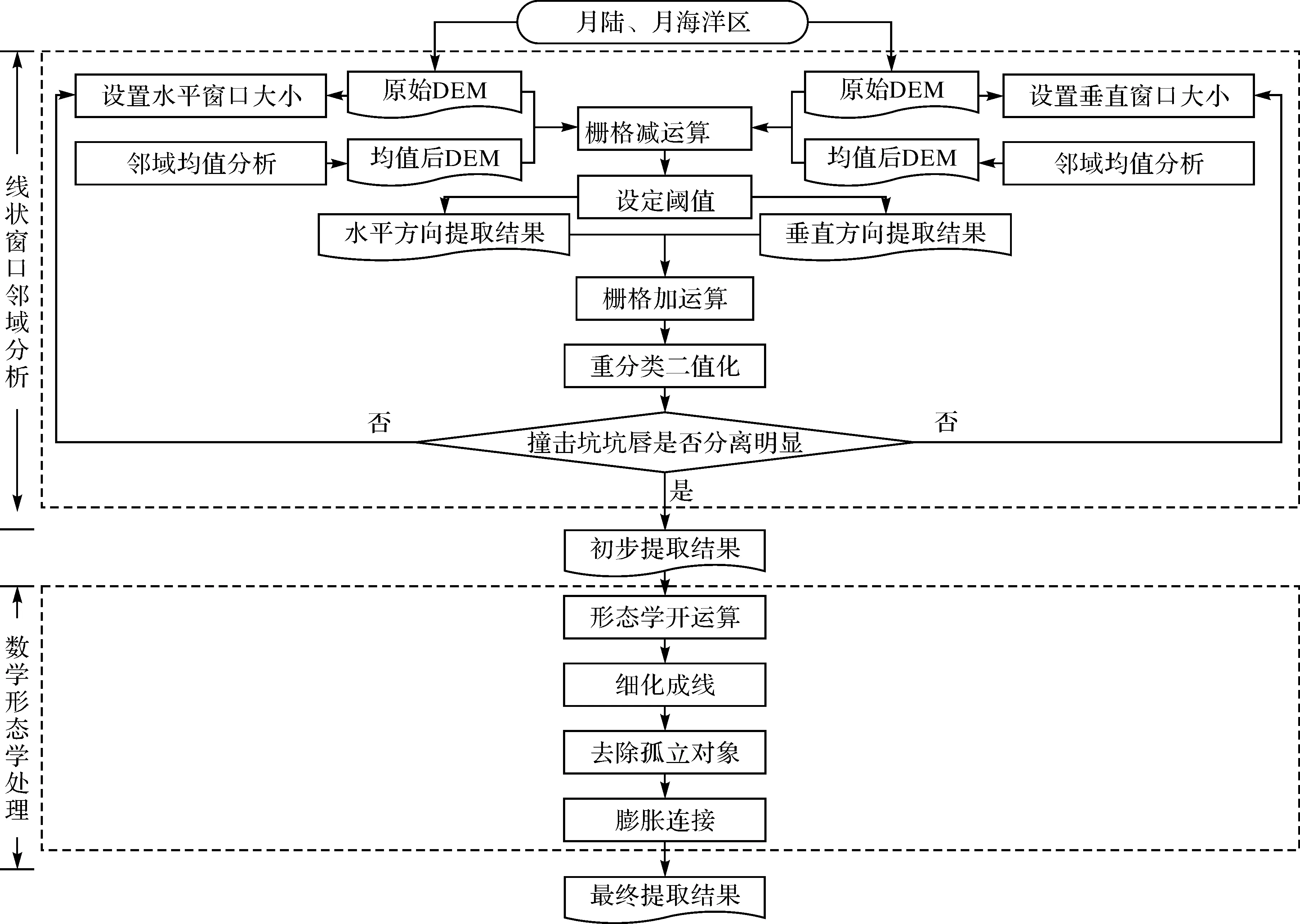
圖3 算法的技術路線
2 試驗設計
針對兩個研究樣區,首先分別使用1×n和n×1的水平和垂直方向上的線狀分析窗口對樣區DEM進行鄰域均值分析,將原始樣區DEM與均值分析后的DEM作柵格減運算。然后給定一個閾值,對水平與垂直方向上的相減運算結果分別取相同閾值大小進行過濾,將二者相加求和后二值化,得到該閾值下1×n和n×1分析窗口的結果。最后依次改變分析窗口大小及提取閾值試驗,直至得到坑唇線柵格突出、連續,區域雜質較少的撞擊坑最佳提取效果。試驗結果表明,隨著分析窗口的擴大,撞擊坑的提取效果依次增強,但是雜質噪音也隨之增多。需要指出的是,不同大小的分析窗口下都有一個最佳的提取閾值,閾值的選取標準與原始DEM減去均值分析后的DEM高程差值相關。最終將各個窗口的最佳提取效果進行疊加比對,從中選擇最佳的線狀分析窗口,以及該窗口下的最佳提取閾值。本文經過撞擊坑的坑唇線提取效果與雜質噪音二者綜合取舍試驗,確定本文的月海樣區最佳提取窗口為1×7和7×1,該窗口下的最佳提取閾值為4.5;月陸樣區最佳提取窗口為1×9和9×1,該窗口下的最佳提取閾值為6(如圖4所示)。

圖4 線狀窗口鄰域分析最佳結果
2.1 數學形態學處理
研究樣區存在一定的高低起伏,導致提取的撞擊坑存在一定偽坑,這些偽坑主要是月表山脈、月溪、月谷、斷裂帶等月貌單元[33]。由圖4可知,本文算法對撞擊坑進行正確提取的同時,存在局部撞擊坑邊界不連續,沒有形成閉合曲線等問題。為此需要對提取結果進行數學形態學處理[35-36]。
本文利用Matlab軟件選擇形態學開運算,對提取結果進行細化成線、去除孤立對象、膨脹連接等操作,得到坑唇線連續、閉合的撞擊坑提取結果(如圖5 所示)。

圖5 數學形態學處理結果
2.2 人工手動編輯處理
由圖5可知,數學形態學處理后的效果仍然存在少量雜質。為得到最佳的提取效果,必須將上述形態學處理后的柵格坑唇線轉換為矢量坑唇線,以原始DEM數據暈渲圖為映襯,對矢量坑唇線輔以人工手動編輯處理,去除剩余的雜質,連接少量未閉合的坑唇線,得到正確完整提取、正確部分提取、錯誤提取和未提取4種結果(如圖6所示)。為便于目視識別,本文只保留直徑大于1 km的撞擊坑。
3 算法提取結果評價
本文以基于DEM坡度變率為基準、以暈渲圖為背景,輔以坡度、坡向等地形因子,綜合判斷識別直徑大于1 km的撞擊坑為標準結果,對撞擊坑提取結果從以下3方面進行評價:①提取精度;②提取狀態;③與前人提取結果比對。
3.1 提取精度評價
本文采用Shufelt[37]提出的算法評價因子來評價算法的提取精度(見表1)。其因子指標有:構建檢測百分比D(building detection percentage)=100TP/(TP+FN),分支系數B(branching factor)=FP/TP,質量百分比Q(quality percentage)=100TP/(TP+FP+FN)。其中,TP為識別到的撞擊坑且為真實撞擊坑的個數;FN為未能識別到的真實撞擊坑個數;FP為識別到的撞擊坑但為非真實的撞擊坑個數。構建檢測百分比D可以作為撞擊坑識別精度的度量,分支系數B可以作為算法的正確性度量,質量百分比Q可以作整個算法質量的度量。由于存在未能完全提取的撞擊坑,本文以提取部分占所在撞擊坑的1/2及以上作為真實提取的撞擊坑,反之為未能提取的撞擊坑。

圖6 兩試驗樣區撞擊坑提取結果
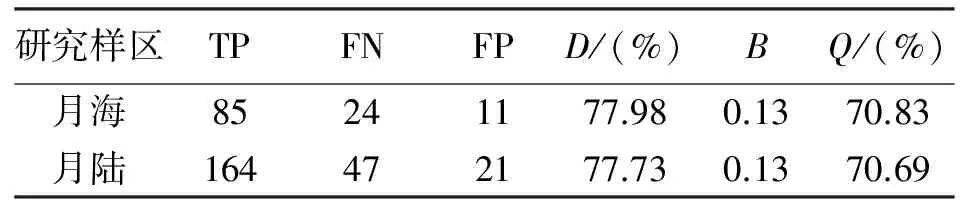
表1 撞擊坑提取精度評價
評價結果顯示,本文月海和月陸的撞擊坑識別精度評價因子D達到77%以上,算法的分支系數B為0.13,整個算法的提取質量Q在70%以上。由于月海的撞擊坑多以簡單撞擊坑為主而月陸的撞擊坑多以復雜撞擊坑為主,但是月海撞擊坑在直徑上卻遠遠小于月陸撞擊坑,導致本文算法在提取精度上對于月海和月陸樣區的評價因子數值比較接近,表明本文算法對月海撞擊坑和月陸撞擊坑在提取精度上雖然都不夠高但是彼此差別不大,因此可將本文算法應用于全月球撞擊坑的初步自動提取。
3.2 提取狀態評價
由提取的結果圖顯示,撞擊坑提取狀態有正確提取TE(true extraction)、未提取NE(not extraction)和錯誤提取FE(false extraction)3種情況,其中正確提取和錯誤提取又可分為完全提取CE(complete extraction)、部分提取PE(partial extraction)兩種情況。因此將正確提取分為正確完整提取(TCE)和正確部分提取(TPE)。為了更加精確地評價算法,在正確部分提取基礎上又細分為提取部分占整個撞擊坑比例的1/2及以上和1/2以下兩種情況。分別計算4種提取狀態下撞擊坑個數占手動勾繪標準撞擊坑個數的百分比(見表2),從而進一步評價算法的提取效果,展示提取的撞擊坑的完整情況。

表2 撞擊坑提取狀態評價
評價結果顯示,通過與目視識別的標準結果進行比對計算,月海和月陸樣區的撞擊坑正確完整提取率達到56%以上;正確部分提取率在27%以上,其中提取部分占整個撞擊坑比例的1/2及以上的達到20%左右;未提取率在15%以下;錯誤提取率在10%左右,表明兩個樣區的各項狀態指標在數值上比較接近。如果將正確部分提取中提取部分占整個撞擊坑比例的1/2及以上算作理想的提取結果,加上實際的正確完整提取的結果,兩個樣區的撞擊坑有效提取率將分別達到77.99%和77.72%,既驗證了前面部分對撞擊坑提取精度的評價,也說明了本文算法的提取結果滿足對全月表撞擊坑的初步自動提取。
3.3 與前人提取結果比對評價
通常不同算法的提取結果評價應當建立在相同分辨率的數據類型和研究樣區的基礎之上,這樣的結果才具有可比性。雖然目前撞擊坑的提取主要是基于遙感影像和DEM數據兩種不同數據類型而進行的,但遺憾的是目前無法找到基于相同數據類型且相同分辨率的研究,而且研究樣區也都不一致,因而無法進行完全公平的檢測結果比對。為了比較客觀地評價算法的提取結果,本文選擇與Zuo W等[38]基于DEM數據等高線的撞擊坑自動識別的檢測方法的提取結果進行評價因子比對(見表3)。選擇原因有二:①在Zuo W等的研究中,研究數據采用嫦娥一號500 m分辨率和嫦娥二號30 m分辨率DEM數據,與本文100 m分辨率DEM的數據類型相同且有很好的過渡性;②Zuo W等的研究也將DEM數據應用于兩個研究樣區,且與本文研究樣區的撞擊坑特征相似,二者具有極高的可比性。

表3 與Zuo W等提取結果評價因子比對
比對結果顯示,Zuo W等兩個樣區的提取結果中,檢測百分比D都達到80%以上,高于本文算法提取結果,但分支系數B高于本文結果。說明其結果雖然在提取精度上高于本文結果,但是其提取結果的錯誤率也要高于本文結果。從質量百分比Q來看,本文100 m分辨率提取結果對于其500 m分辨率和30 m分辨率提取結果,兩個算法的整體提取質量相當。
4 結論與討論
本文利用100 m分辨率DEM數據,根據撞擊坑坑唇相對凸起的地形特征,提出一種線狀窗口鄰域均值分析方法自動提取月表撞擊坑,通過在月海與月陸兩種不同樣區的研究,在綜合分析提取方法和提取結果的基礎之上,主要得出以下結論:
(1) 本文提出的基于DEM線狀窗口鄰域分析的方法,能夠根據月表撞擊坑實際地形形態對其進行自動檢測。由提取結果的評價因子顯示,該方法具有一定的普適性。
(2) 從試驗的過程來看,不同大小的線狀分析窗口對撞擊坑的提取結果不同,且在相同大小的線狀分析窗口下,不同的提取閾值也會產生不同的提取結果。因此,不同大小的分析窗口下都有一個最佳的提取閾值。通過不同大小分析窗口及相同大小分析窗口下不同閾值的試驗比對,本文的月海樣區的最佳提取窗口為1×7和7×1,該窗口下的最佳提取閾值為4.5;月陸樣區的最佳提取窗口為1×9和9×1,該窗口下的最佳提取閾值為6。
(3) 從提取結果的狀態來看,本文提取結果與目視識別結果比對顯示,兩個樣區的完整提取、部分提取、未提取和錯誤提取占比分別約為58%、28%、14%和10%,其中部分提取中提取部分占整個撞擊坑比例的1/2及以上的約占20%,如果將其算作理想提取結果,則本文撞擊坑有效提取將達到78%以上。
(4) 從本文結果與Zuo W等基于DEM數據等高線的撞擊坑自動識別的檢測方法結果比對情況來看,雖然Zuo W等檢測結果在提取精度上高于本文結果,但是其提取錯誤率也要高于本文結果。兩個算法的提取質量上各有優勢,表明本文方法在月表撞擊坑的自動提取方面有一定的應用價值。
然而,由于月表實際地形及撞擊坑幾何形態組合的復雜多樣性,該方法未能完全實現提取過程的自動化,特別是未提取和錯誤提取達到了24%左右,這對月表撞擊坑的自動提取來說顯然不是最佳的。未提取的撞擊坑主要有兩類:一是坑唇退化的撞擊坑,其退化原因主要是月球自身地質活動演化和后期撞擊坑的隨機撞擊結果所致;二是地勢較低的撞擊坑,由于其高程差值不大,與地勢較高的撞擊坑組合在一起時,算法難以確定一個能完全囊括不同地勢高低起伏的提取閾值。錯誤提取的撞擊坑實為偽撞擊坑,包括由于多個撞擊坑邊緣彼此相交連接而形成的偽坑及其他月貌單元,如山脈、月嶺、月溪、月谷等。因此,在后期的研究中,因充分結合坡度、坡向、曲率等地形因子綜合判斷,設計不同的線狀分析窗口大小,實現對撞擊坑的正確有效提取。
參考文獻:
[1] LUO L,WANG X,GUO H,et al.Automatic Detection of Lunar Craters Based on CE-1 DEM Data[J].Journal of Remote Sensing ,2014(1):105-116.
[2] 歐陽自遠.月球科學概論[M].北京:中國宇航出版社,2005:58-64.
[3] HUANG Q,PING J,SU X,et al.New Features of the Moon Revealed and Identified by CLTM-s01[J].Science in China:Physics,Mechanics and Astronomy,2009,52(12):1815-1823.
[4] 王嬌,程維明,周成虎.全月球撞擊坑識別、分類及空間分布[J].地理科學進展,2015,34(3):330-339.
[5] LEROY B,MEDIONI G,JOHNSON E,et al.Crater Detection for Autonomous Landing on Asteroids[J].Image & Vision Computing,2001,19(11):787-792.
[6] 李超,王心源,駱磊,等.基于Apollo圖像的月表撞擊坑自動提取[J].國土資源遙感,2012,24(4):71-75.
[7] BARATA T,ALVES E I,SARAIVA J,et al.Automatic Recognition of Impact Craters on the Surface of Mars[J].Lecture Notes in Computer Science,2004,3212(3212):489-496.
[8] BANDEIRA L,WEI D,STEPINSKI T F.Detection of Sub-kilometer Craters in High Resolution Planetary Images Using Shape and Texture Features[J].Advances in Space Research,2012,49(1):64-74.
[9] 岳宗玉,劉建忠,吳淦國.應用面向對象分類方法對月球撞擊坑進行自動識別[J].科學通報,2008,53(22):2809-2813.
[10] 陳偉濤,閆柏琨,張志.基于嫦娥一號CCD 數據空間特征的特定目標識別[J].國土資源遙感,2009,21(4):40-44.
[11] BARNES A H.An Object-oriented Classification of Impact Craters Using Lunar Reconnaissance Orbiter Data[D].San Francisco,California:San Francisco State University,2016.
[12] DING M,CAO Y,WU Q.Method of Passive Image Based Crater Autonomous Detection[J].Chinese Journal of Aeronautics,2009,22(3):301-306.
[13] HONDA R,AZUMA R.Crater Extraction and Classification System for Lunar Images[R].Kochi:Kochi University,2000:13-22.
[14] 魏士儼,張建利,彭松,等.虹灣地區月面撞擊坑自動提取[J].計算機仿真,2013,30(8):74-77.
[15] BANDEIRA L,SARAIVA J,PINA P.Impact Crater Recognition on Mars Based on a Probability Volume Created by Template Matching[J].IEEE Transactions on Geoscience & Remote Sensing,2007,45(12):4008-4015.
[16] BANDEIRA L P C,SARAIVA J,PINA P.Development of a Methodology for Automated Crater Detection on Planetary Images[J].Springer Berlin Heidelberg,2007,4447 (4):193-200.
[17] WANG Y,YANG G,GUO L.A Novel Sparse Boosting Method for Crater Detection in the High Resolution Planetary Image[J].Advances Space Research,2015,56(5):982-991.
[18] XIN X,DI K C,WANG Y X,et al.Automated Detection of New Impact Sites on Martian Surface from HiRISE Images[J].Advancesm Space Research,2017,60(7):1557-1569.
[19] 丁萌,李海波,曹云峰,等.基于光學圖像的撞擊坑識別研究綜述[J].深空探測學報,2015,2(3):195-202.
[20] MICHAEL G G.Coordinate Registration by Automated Crater Recognition [J].Planetary & Space Science,2003,51(9/10):563-568.
[21] BUE B D,STEPINSKI T F.Machine Detection of Martian Impact Craters from Digital Topography Data[J].IEEE Transactions on Geoscience & Remote Sensing,2006,45(1):265-274.
[22] HARADA N,HAYASHI T,HIRATA N,et al.Recognition Algorithm for Topographic Features[C]∥17th IEEE International Conference on Computer and Information Technology(CIT 2007).[S.l.]:CIT,2007:685-689.
[23] DI K,LI W,YUE Z,et al.A Machine Learning Approach to Crater Detection from Topographic Data[J].Advances in Space Research,2014,54(11):2419-2429.
[24] COHEN J P.Automated Crater Detection Using Machine Learning[D].Boston:University of Massachusetts Boston,2016.
[25] 劉宇軒,劉建軍,牟伶俐,等.撞擊坑識別方法綜述[J].天文研究與技術,2012,9(2):203-212.
[26] 張鋒,鄒永廖,鄭永春,等.月表撞擊坑自動識別與提取的新方法及其應用[J].地學前緣,2012,19(6):118-127.
[27] 羅中飛,康志忠,劉心怡.融合嫦娥一號CCD影像與DEM 數據的月球撞擊坑自動提取和識別[J].測繪學報,2014,43(9):924-930.
[28] KANG Z,LUO Z,HU T.Automatic Extraction and Identification of Lunar Impact Craters Based on Optical Data and DEMs Acquired by the Chang’E Satellites[J].IEEE Journal of Selected Topics in Applied Earth Observations & Remote Sensing,2016,8(10):4751-4761.
[30] 周增坡,程維明,周成虎,等.基于“嫦娥一號”的月表形貌特征分析與自動提取[J].科學通報,2011,58(1):18-26.
[31] 賀力.基于“DEM”的月球撞擊坑判識方法研究[D].南京:南京師范大學,2012.
[32] 王琛智,湯國安,袁賽,等.基于DEM紋理特征的月貌自動識別方法探究[J].地球信息科學學報,2015,17(1):45-53.
[33] 王梁,丁孝忠,韓坤英,等.月球數字地質圖的編制與研究[J].中國地質,2015(1):331-341.
[34] 周毅,湯國安,張婷,等.基于格網DEM線狀分析窗口的地形特征線快速提取方法[J].測繪通報,2007(10):67-69.
[35] 陶興龍.數學形態學和分形理論在圖像去噪和邊緣提取中的應用[D].南京:南京信息工程大學,2013.
[36] 袁悅峰,朱培民,趙娜,等.基于數學形態學的月海圓形撞擊坑自動識別方法[J].中國科學(物理學 力學 天文學),2013,43(3):324-332.
[37] SHUFELT J.Performance Evaluation and Analysis of Monocular Building Extraction from Aerial Imagery[J].IEEE Transactions on Pattern Analysis & Machine Intelligence,1999,21(4):311-326.
[38] ZUO W,ZHANG Z,LI C,et al.Contour-based Automatic Crater Recognition Using Digital Elevation Models from Chang’E Missions[J].Computers & Geosciences,2016,97(C):79-88.
猜你喜歡
石油瀝青(2021年4期)2021-10-14 08:50:44
世界科學技術-中醫藥現代化(2021年10期)2021-03-02 05:52:06
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
中國教育技術裝備(2015年19期)2015-03-01 02:43:07
中國工程咨詢(2015年2期)2015-02-14 02:59:26
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
終身教育研究(2014年5期)2014-02-28 01:23:06
俄羅斯問題研究(2012年1期)2012-03-25 09:54:51