基于北斗短報(bào)文通信和落點(diǎn)預(yù)測方法的信標(biāo)機(jī)設(shè)計(jì)
2018-07-05 15:31:18紀(jì)長松李北國焦新泉
中國測試 2018年6期
史 謙, 紀(jì)長松, 李北國, 劉 磊, 焦新泉
(1. 中北大學(xué) 儀器科學(xué)與動態(tài)測試教育部重點(diǎn)實(shí)驗(yàn)室,山西 太原 030051; 2. 中國運(yùn)載火箭技術(shù)研究院,北京 100076;3. 北京航天長征飛行器研究所,北京 100076; 4. 北京控制與電子技術(shù)研究所,北京 100018)
0 引 言
信標(biāo)機(jī)主要用于對外發(fā)送飛行器等設(shè)備的位置標(biāo)識信息,引導(dǎo)地面人員進(jìn)行搜尋、回收。在飛行試驗(yàn)后,飛行器的落點(diǎn)范圍往往較為廣泛且地形復(fù)雜,而飛行器自身體積較小,僅憑人工搜尋,會浪費(fèi)大量的人力和時(shí)間,因此可借助信標(biāo)機(jī)來指示落點(diǎn)的方位,以降低搜尋的難度[1]。目前,國內(nèi)常用的信標(biāo)機(jī)和飛行器等一起下落,落地之后采用無線射頻的方式發(fā)射信號[2],以此來指示搜尋方向。但在實(shí)際應(yīng)用中,因落點(diǎn)環(huán)境未知因素較多,信標(biāo)機(jī)有可能會被殘骸遮蔽使其無法接收、發(fā)送信號,還有可能因落地沖擊而砸入地下或與巖石等堅(jiān)硬的物體相撞[3],致使其無法正常工作甚至損毀,降低了工作的可靠性。
針對上述傳統(tǒng)信標(biāo)機(jī)存在的缺陷,本文提出了一種基于北斗短報(bào)文通信和落點(diǎn)預(yù)測方法的新型信標(biāo)機(jī)設(shè)計(jì)。信標(biāo)機(jī)在隨飛行器下落過程中,獲取其定位信息并預(yù)測落點(diǎn),在落地前將預(yù)測信息以北斗短報(bào)文的形式發(fā)送給地面接收終端,如果落地后仍能正常工作,則發(fā)送落點(diǎn)的實(shí)時(shí)定位信息,通過預(yù)測信息和實(shí)時(shí)定位信息的雙備份設(shè)計(jì)實(shí)現(xiàn)對飛行器落點(diǎn)位置的標(biāo)示,方便地面人員搜尋。該設(shè)計(jì)避免了落地時(shí)的復(fù)雜情況對信標(biāo)機(jī)工作的影響,擴(kuò)大了通信范圍,增強(qiáng)了系統(tǒng)工作的可靠性。
1 硬件設(shè)計(jì)
1.1 硬件系統(tǒng)組成
信標(biāo)機(jī)主要由定位模塊、短報(bào)文發(fā)送模塊、電源模塊、信息處理模塊及北斗手持終端組成,其總體設(shè)計(jì)框圖如圖1所示。
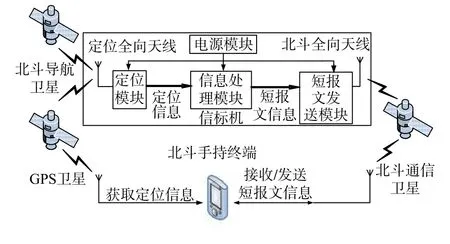
圖1 信標(biāo)機(jī)的組成框圖
1.2 硬件的選擇及電路設(shè)計(jì)
1.2.1 定位模塊設(shè)計(jì)
為了在高動態(tài)的復(fù)雜運(yùn)動環(huán)境下仍能準(zhǔn)確快速地獲得定位信息,簡化結(jié)構(gòu)設(shè)計(jì),選用CNS35H GPS/BD衛(wèi)星導(dǎo)航接收機(jī)作為定位模塊[4]。該模塊實(shí)現(xiàn)了射頻、基帶、導(dǎo)航解算一體化設(shè)計(jì),具有體積小、質(zhì)量輕、可靠性高的特點(diǎn)[5],其定位精度為水平方向5 m,垂直方向10 m,速度精度0.2 m/s,沒有使用高度和速度的限制。它還具有衛(wèi)星歷書存儲功能,在發(fā)射前可通過串口預(yù)先加載星歷,加快定位速度。該模塊的輸出數(shù)據(jù)包含時(shí)間、三維坐標(biāo)、速度等完整信息。此外,為了能夠承受著地時(shí)較大的沖擊加速度而不損壞,選用了專用微帶天線[6]。
1.2.2 信息處理模塊設(shè)計(jì)
信標(biāo)機(jī)以MCU及其外圍電路為核心處理器,通過UART接口實(shí)現(xiàn)與定位模塊及短報(bào)文發(fā)送模塊之間的通信。信息處理模塊的主要功能有:接收定位語句并判斷定位是否有效;從有效語句中解析出時(shí)間、經(jīng)度、緯度、高度、速度等信息并進(jìn)行落點(diǎn)預(yù)測運(yùn)算;編譯北斗短報(bào)文并控制發(fā)送。此外,信息處理模塊還具有電源管理控制、SIM卡切換等功能。
1.2.3 短報(bào)文發(fā)送模塊設(shè)計(jì)
落點(diǎn)信息的發(fā)送主要通過北斗短報(bào)文通信功能來實(shí)現(xiàn),它具有通信不受地域限制[7]和不易受干擾的優(yōu)點(diǎn)。由于信標(biāo)機(jī)在空中停留時(shí)間較短,而北斗民用級SIM卡通信頻度為60 s,若信標(biāo)機(jī)在空中停留的時(shí)間短于短報(bào)文的通信周期,則信標(biāo)機(jī)在空中僅能發(fā)送一次信息,如果地面終端沒有接收到這條信息,且信標(biāo)機(jī)落地后損壞,則信標(biāo)機(jī)無法發(fā)揮作用。針對上述問題,設(shè)計(jì)了SIM卡切換復(fù)用電路來實(shí)現(xiàn)短報(bào)文的發(fā)送[8],增加了信標(biāo)機(jī)在空中的通信次數(shù),提高落點(diǎn)信息發(fā)送的可靠性。該電路由MCU、切換電路、通信SIM卡和短報(bào)文模塊等部分組成。SIM卡的切換原理為:系統(tǒng)上電后,由MCU通過切換電路控制短報(bào)文模塊和相應(yīng)SIM卡的供電,以MCU的通信端口接收短報(bào)文模塊提供的反饋信號,當(dāng)短報(bào)文模塊根據(jù)設(shè)計(jì)進(jìn)程完成相應(yīng)的操作后,MCU再根據(jù)反饋信息的變化來完成相應(yīng)的切換和發(fā)送工作。
1.2.4 電源模塊設(shè)計(jì)
由于在發(fā)送短報(bào)文信息時(shí)需要輸出一個(gè)瞬間的大電流,為了滿足信標(biāo)機(jī)供電的需求,保障供電的可靠性,采用了兩塊容量為2 000 mAh的可充電鋰電池并聯(lián)為其供電。為了確保鋰電池在使用時(shí)有充足的電量,延長信標(biāo)機(jī)工作的時(shí)間[9],設(shè)計(jì)了相應(yīng)的供電管理電路對信標(biāo)機(jī)的供電進(jìn)行控制:在飛行過程中,選擇外部電源給信標(biāo)機(jī)供電,使其能夠加載星歷并搜索衛(wèi)星信號,同時(shí)以相應(yīng)的充電電路對鋰電池充電;在信標(biāo)機(jī)下落時(shí),由MCU判斷到外部電源供電信號脫離后,電源管理電路選擇內(nèi)部鋰電池繼續(xù)為其供電,這樣可以避免內(nèi)部鋰電池過早消耗導(dǎo)致信標(biāo)機(jī)無法正常工作。
2 軟件設(shè)計(jì)
2.1 落點(diǎn)預(yù)測原理
選擇在下落的最后階段進(jìn)行落點(diǎn)預(yù)測,此時(shí)信標(biāo)機(jī)運(yùn)動姿態(tài)比較穩(wěn)定,便于分析和計(jì)算。對信標(biāo)機(jī)進(jìn)行受力分析可知[10]:在下落過程中,豎直方向上受到向下的重力和向上的空氣阻力,在下落初始時(shí),空氣阻力大于重力,信標(biāo)機(jī)做加速度減小的減速運(yùn)動,隨著速度的減小,空氣阻力也在減小,當(dāng)空氣阻力等于重力時(shí),信標(biāo)機(jī)勻速下落;在水平方向上受到與運(yùn)動方向相反的空氣阻力,做減速運(yùn)動。
以信標(biāo)機(jī)下落到某一點(diǎn)時(shí)的時(shí)間、位置、速度等信息為基礎(chǔ),根據(jù)牛頓力學(xué)公式和數(shù)學(xué)方法可以計(jì)算出信標(biāo)機(jī)在各個(gè)方向上的關(guān)系,再以信標(biāo)機(jī)從該點(diǎn)下降到預(yù)計(jì)著陸區(qū)的海拔高度所用的時(shí)間為運(yùn)動時(shí)間,可由上述關(guān)系來預(yù)測信標(biāo)機(jī)的最終落點(diǎn)。
設(shè)信標(biāo)機(jī)下落到某一點(diǎn)時(shí)的定位信息為:時(shí)間t0、經(jīng)度X0、緯度Y0、海拔高度Z0、東向速度Vx0、北向速度Vy0、天向速度Vz0,其中東向速度與經(jīng)度變化方向平行,北向速度與緯度變化方向平行,天向速度與海拔高度方向平行。
又有空氣阻力公式:

式中:
C——空氣阻力系數(shù);
ρ——空氣密度,kg/m3;
S——等效受力面積,m2;
V——物體與空氣的相對運(yùn)動速度,m/s。
因?yàn)樵谙侣鋾r(shí)信標(biāo)機(jī)運(yùn)動速度較大,空氣相對信標(biāo)機(jī)的運(yùn)動速度可以忽略不計(jì),則(1)式中為信標(biāo)機(jī)的運(yùn)動速度。
以為零時(shí)刻,根據(jù)牛頓第二定律可得[11]:
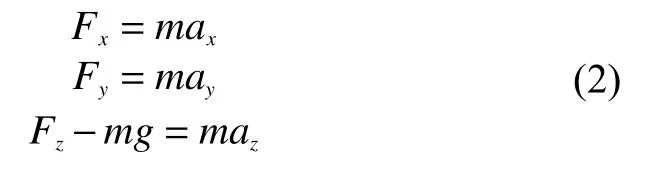
式中:
m——信標(biāo)機(jī)的質(zhì)量,kg;
g——重力加速度,m/s2;
Fx、Fy、Fz——信標(biāo)機(jī)在經(jīng)度、緯度、海拔高度方向上所受空氣阻力,N;
ax、ay、az——信標(biāo)機(jī)在經(jīng)度、緯度、海拔高度方向上的加速度,m/s2。
由式(1)可得:
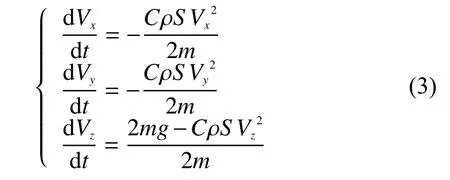
因?yàn)榧铀俣确较蚺c速度方向相反,因此有重力、空氣阻力前符號的變化[12]。
對(3)式進(jìn)行分離變量有:

其中
對式(4)等號兩端求積分,并加入初始條件可得到:

其中,
由(5)可得信標(biāo)機(jī)從開始下落到t時(shí)的豎直方向速度:
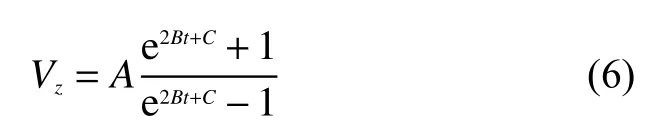
將速度與位移之間的關(guān)系式代入式(6)可得:

由式(7)和初始條件可得信標(biāo)機(jī)在t時(shí)刻相對Z0下降的位移:
同理,根據(jù)式(3)可得其他兩個(gè)方向上速度、位移隨時(shí)間的變化關(guān)系。
經(jīng)度方向:
緯度方向:
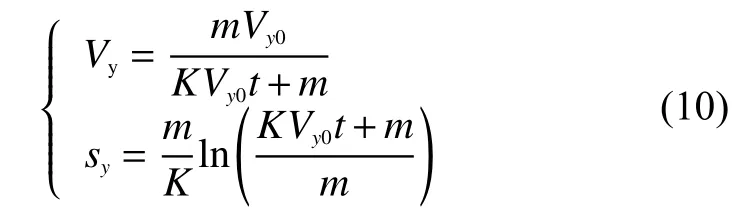
其中,sx、sy是信標(biāo)機(jī)在t時(shí)刻沿速度方向移動的位移。
現(xiàn)假設(shè)預(yù)計(jì)著落地區(qū)的海拔高度為H,將其代入式(8)可得從零時(shí)刻到著陸時(shí)的下落時(shí)間為(取其中合理的根):

其中
將?t代入公式(9)、(10)即可計(jì)算出信標(biāo)機(jī)在經(jīng)緯度方向上的位移變化?sx、?sy,又已知零時(shí)刻信標(biāo)機(jī)的坐標(biāo)為(X0,Y0,Z0),根據(jù)速度方向可預(yù)測落點(diǎn)坐標(biāo)(X0±?sx,Y0±?sy,H),若速度為正值,取“+”,為負(fù)值時(shí),取“-”。
2.2 軟件的實(shí)現(xiàn)
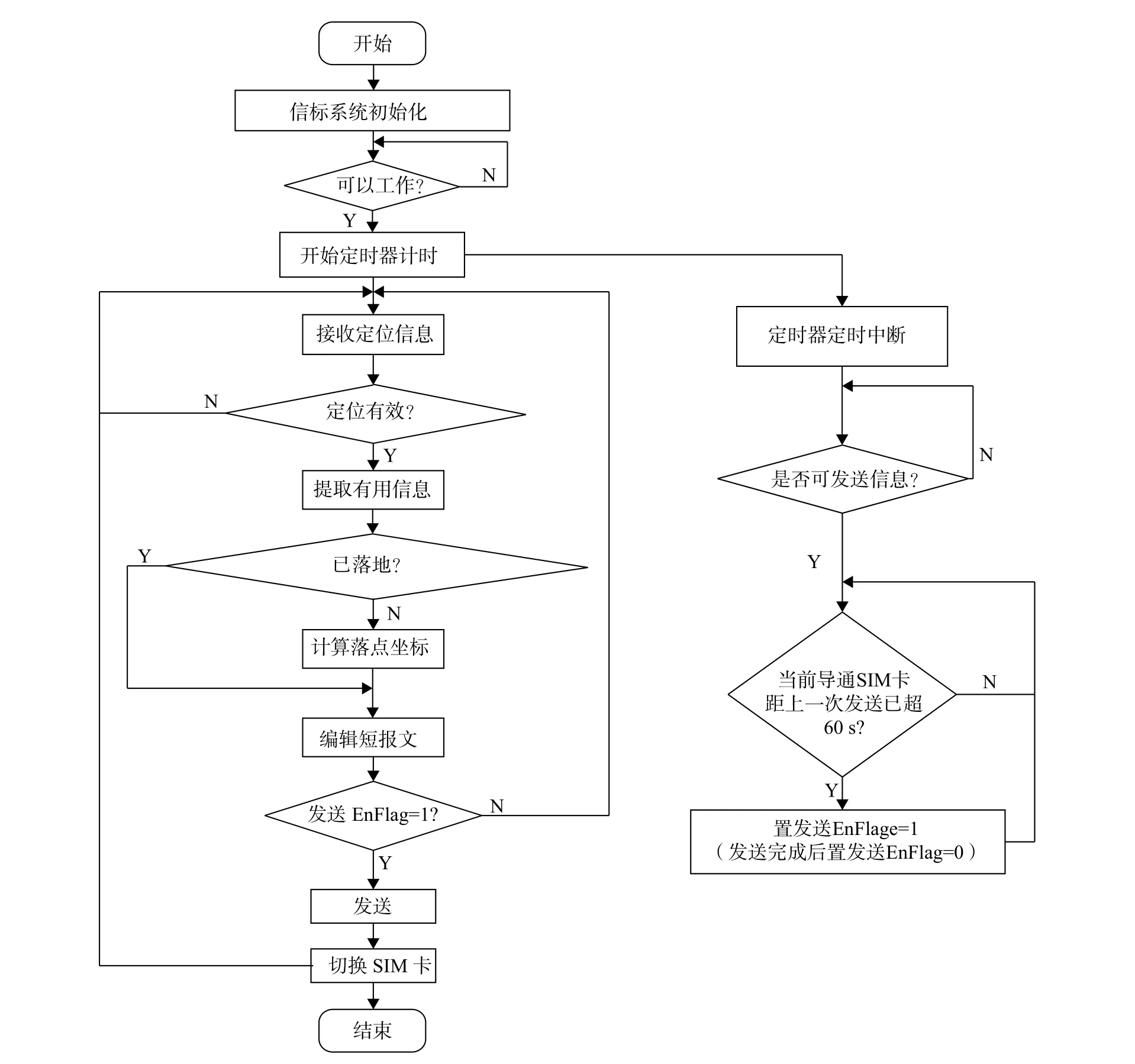
圖2 信標(biāo)機(jī)工作流程圖
信標(biāo)系統(tǒng)程序的核心是定位信息的處理、落點(diǎn)坐標(biāo)計(jì)算和北斗短報(bào)文的發(fā)送,其具體的流程如圖2所示。首先,在試驗(yàn)前給信標(biāo)機(jī)上電,完成整個(gè)系統(tǒng)的初始化,在信標(biāo)機(jī)下落到某一階段時(shí)開始工作。其次信標(biāo)機(jī)開機(jī)后開始接收定位模塊發(fā)送的實(shí)時(shí)定位信息,接收完成后判斷此次定位信息是否有效。如果定位無效,則重新開始接收、判斷。如果定位有效,則從中提取時(shí)間、經(jīng)緯度、海拔高度以及速度等信息。再次,根據(jù)此刻時(shí)間判斷信標(biāo)機(jī)是否落地,如果還未落地,則根據(jù)提取到的信息預(yù)測落點(diǎn)并編譯短報(bào)文,在判斷到發(fā)送條件滿足后將短報(bào)文發(fā)送出去。如果已經(jīng)落地,則將提取到的信息直接編譯發(fā)送。最后,本次發(fā)送完成后,切換通信SIM卡并重新開始接收、發(fā)送,直至電源電量耗盡。
3 實(shí)驗(yàn)結(jié)果及分析
將信標(biāo)機(jī)安裝完成后放置在山頂,將手持終端放置在地面,進(jìn)行模擬實(shí)驗(yàn),測試系統(tǒng)性能。測試前,先對程序中預(yù)測公式包含的常量參數(shù)賦值,并將修改后程序載入MCU。實(shí)驗(yàn)時(shí),先將地面接收終端開機(jī),獲取終端所處位置坐標(biāo),并通過“自發(fā)自收”來檢測接收終端是否能夠正常工作。信標(biāo)機(jī)及測試設(shè)備檢測如圖3所示。測試結(jié)果如圖4所示。
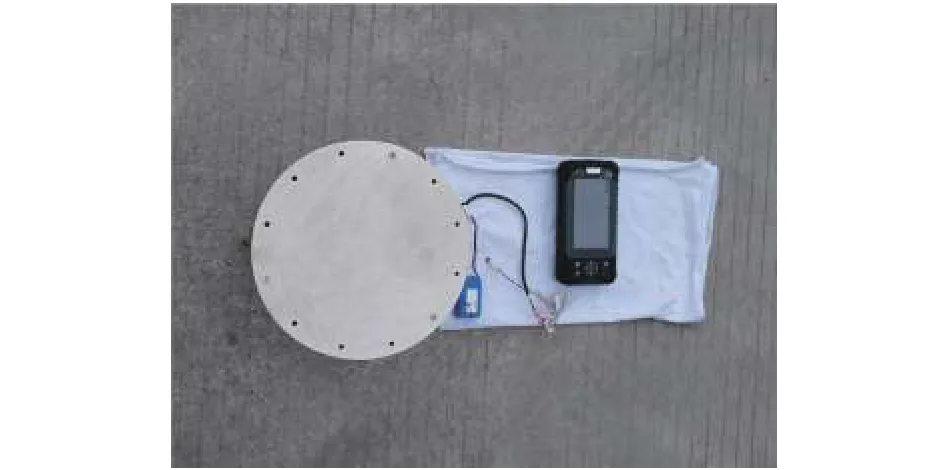
圖3 實(shí)驗(yàn)測試設(shè)備檢測圖

圖4 地面手持終端自檢結(jié)果
再給信標(biāo)機(jī)上電,通過外置接口加載星歷并查看定位狀態(tài),待定位成功后將信標(biāo)機(jī)拋出,用地面手持終端接收信息。手持終端接收到的短信如圖5所示。

圖5 手持終端接收到的短報(bào)文信息
圖5(a)是信標(biāo)機(jī)在落地前SIM卡1發(fā)出的短報(bào)文信息,包括以“A”為幀頭的時(shí)刻定位信息和以“B”為幀頭的落點(diǎn)預(yù)測信息。圖5(b)是信標(biāo)機(jī)落地后SIM卡2發(fā)出實(shí)時(shí)定位信息。
按照上述步驟重復(fù)3次實(shí)驗(yàn),再以實(shí)際落點(diǎn)的坐標(biāo)為參考,將預(yù)測的落點(diǎn)位置和它進(jìn)行比較并計(jì)算誤差,對比結(jié)果如表1所示。
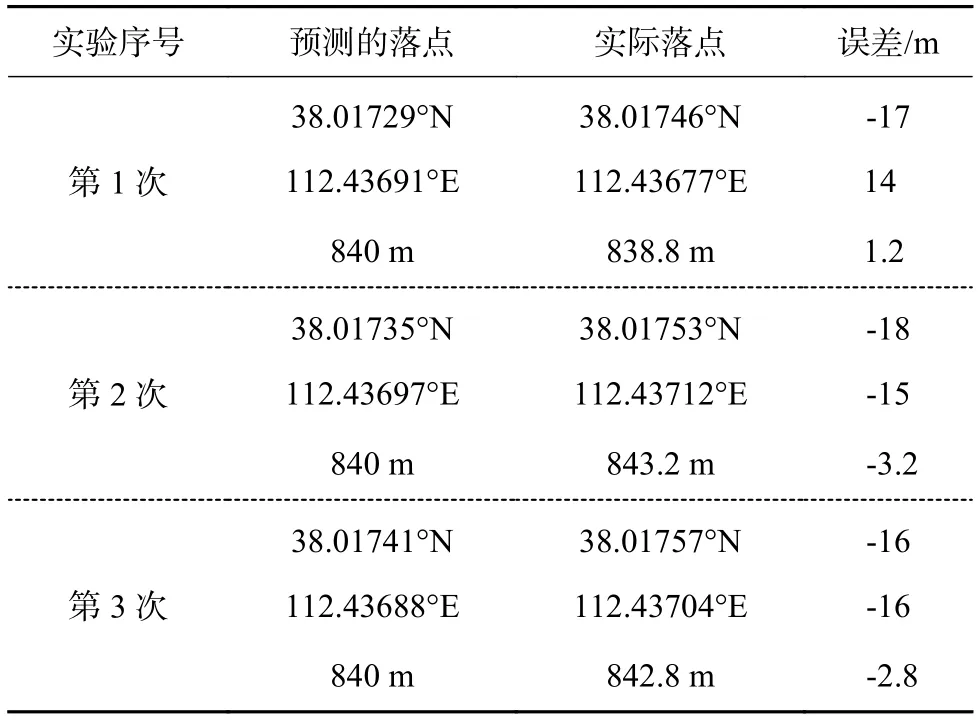
表1 預(yù)測落點(diǎn)與實(shí)際落點(diǎn)結(jié)果對比
測試結(jié)果表明,預(yù)測坐標(biāo)與最終實(shí)際落點(diǎn)坐標(biāo)之間在經(jīng)度、緯度方向上偏差都小于20 m,處在搜索人員的視距范圍之內(nèi)。根據(jù)接收終端位置和預(yù)測的落點(diǎn)坐標(biāo)或?qū)嶋H落點(diǎn)坐標(biāo)都可以確定正確的搜尋方向,縮小搜尋的范圍。
4 結(jié)束語
本文以落點(diǎn)預(yù)測方法和北斗短報(bào)文通信為核心設(shè)計(jì)了一種新型的信標(biāo)機(jī),利用信標(biāo)機(jī)在過程中某一點(diǎn)的動態(tài)信息及坐標(biāo),預(yù)測其大概的落點(diǎn)位置,通過北斗短報(bào)文將預(yù)測信息發(fā)送回地面,避免了著陸時(shí)各種復(fù)雜情況對信標(biāo)機(jī)的影響。從實(shí)際測試結(jié)果來看,空中發(fā)送預(yù)測坐標(biāo)和落地后發(fā)送實(shí)時(shí)坐標(biāo)兩種方式的結(jié)合提高了信標(biāo)機(jī)指示位置的可靠性和對飛行器的回收效率,降低了搜尋難度,具有較好的可行性和良好的應(yīng)用前景。
[1]崔麗麗, 丁永紅, 尤文斌, 等. 基于MSP430單片機(jī)的信標(biāo)機(jī)系統(tǒng)設(shè)計(jì)[J]. 中國測試, 2015, 41(10): 81–84.
[2]張獻(xiàn)生, 譚秋林, 丁利瓊, 等. 基于銥星系統(tǒng)的信標(biāo)機(jī)設(shè)計(jì)[J]. 計(jì)算機(jī)測量與控制2013, 21(10): 2804–2807.
[3]李金力. 箭載數(shù)據(jù)存儲器回收系統(tǒng)關(guān)鍵技術(shù)研究 [D]. 太原:中北大學(xué), 2010.
[4]李雯琦, 吳宏, 張南, 等. 地面數(shù)字電視信號與GPS相結(jié)合的定位系統(tǒng)[J]. 電視技術(shù), 2010, 34(6): 11–15, 31.
[5]吳德偉. 航空無線電導(dǎo)航系統(tǒng)[M]. 北京: 電子工業(yè)出版社,2010: 17–20.
[6]吳志宏, 翟成瑞, 王紅亮. 基于單片機(jī)的信標(biāo)機(jī)系統(tǒng)設(shè)計(jì)[J].電視技術(shù), 2013, 37(15): 44–47.
[7]王中剛. 基于北斗通信的變壓器監(jiān)控報(bào)警系統(tǒng)設(shè)計(jì)[J]. 電工電氣, 2016(1): 21–24.
[8]文斌, 寧志強(qiáng), 陳愛萍, 等. 多SIM卡復(fù)用的"北斗"通信終端設(shè)計(jì)[J]. 電訊技術(shù), 2010, 50(12)23–27.
[9]張遠(yuǎn)海, 翁佩頓. 基于北斗GPS模塊UM220和四頻GPRS模塊SIM800H的人員定位應(yīng)用研究[J]. 電子設(shè)計(jì)工程, 2016, 24(13): 107–109.
[10]郭雪鵬. 考慮空氣阻力的斜拋運(yùn)動研究[J]. 物理教學(xué). 2017,39(4): 14–16.
[11]賈栓穩(wěn). 有阻力的空氣介質(zhì)中質(zhì)點(diǎn)的運(yùn)動規(guī)律[J]. 安陽師范學(xué)院學(xué)報(bào), 2008(5): 32–34.
[12]閔永林, 陳池. 兩種空氣阻力模型的拋射體飛行軌跡研究[J]. 裝備制造技術(shù), 2009(12): 15–17.
猜你喜歡
計(jì)算機(jī)應(yīng)用(2022年2期)2022-03-01 12:33:42
計(jì)算機(jī)應(yīng)用(2022年1期)2022-02-26 06:57:42
計(jì)算機(jī)應(yīng)用(2021年4期)2021-04-20 14:06:36
計(jì)算機(jī)應(yīng)用(2021年3期)2021-03-18 13:44:48
計(jì)算機(jī)應(yīng)用(2021年1期)2021-01-21 03:22:38
中華手工(2017年2期)2017-06-06 23:00:31
小天使·一年級語數(shù)英綜合(2015年2期)2015-01-14 06:35:05
中外會展(2014年4期)2014-11-27 07:46:46
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
