利用數(shù)據(jù)融合改進(jìn)超短基線系統(tǒng)定位精度
2018-08-03 02:57:04嚴(yán)勝剛
測繪通報 2018年7期
關(guān)鍵詞:系統(tǒng)
黃 健,嚴(yán)勝剛
(西北工業(yè)大學(xué)航海學(xué)院,陜西 西安 710072)
超短基線(ultra-short baseline,USBL)定位系統(tǒng)是一種常用的水下聲學(xué)定位設(shè)備[1-4]。常規(guī)的USBL系統(tǒng)通過測量各通道間的相位差或時延差估算目標(biāo)方位,再利用應(yīng)答或同步方式測量目標(biāo)的斜距,進(jìn)而確定目標(biāo)的位置。
USBL系統(tǒng)的設(shè)計是水下聲學(xué)定位技術(shù)中的一項(xiàng)關(guān)鍵技術(shù),平面陣可以對整個空間或以陣列所在平面為界的半空間中的目標(biāo)進(jìn)行定位,在許多情況下都可以達(dá)到系統(tǒng)的設(shè)計要求。文獻(xiàn)[5—6]研究了平面陣的定位原理,并進(jìn)行了詳細(xì)的誤差分析。文獻(xiàn)[7—10]提出了平面八元陣定位原理,通過增加陣元個數(shù)有效地解決了USBL系統(tǒng)中存在的相位差模糊問題。文獻(xiàn)[11—12]介紹了一種三維立體USBL系統(tǒng)接收陣列的設(shè)計。文獻(xiàn)[13]在六元對稱陣的基礎(chǔ)上,給出了若干種USBL系統(tǒng)定位算法。由于基陣孔徑小,且復(fù)雜的水下環(huán)境容易導(dǎo)致信號的相位產(chǎn)生起伏,常規(guī)USBL系統(tǒng)定位精度不高。為了滿足遠(yuǎn)距離定位要求,必須對常規(guī)USBL系統(tǒng)進(jìn)行改進(jìn)。
本文在常用的平面陣定位原理及定位方程的基礎(chǔ)上提出一種提高USBL系統(tǒng)定位精度的方法。以平面五元十字陣為例,系統(tǒng)僅需要測量一次時延差值,即可通過基本的平面陣獨(dú)立地對目標(biāo)進(jìn)行定位,隨后將這些獨(dú)立的定位結(jié)果進(jìn)行有效的數(shù)據(jù)融合,進(jìn)而得到最終的定位結(jié)果。仿真試驗(yàn)表明,該方法可以有效地提高低信噪比情況下USBL系統(tǒng)的定位精度和可靠性。
1 USBL系統(tǒng)的基本原理
平面五元十字陣的定位原理如圖1所示。在圖1 中,平面五元十字陣由兩條正交的線陣S1-S0-S3和S2-S0-S4構(gòu)成。陣元間距為D,以基陣中心S0為坐標(biāo)原點(diǎn)O建立直角坐標(biāo)系,5個陣元的坐標(biāo)分別為S0(0,0,0)、S1(D,0,0)、S2(0,D,0)、S3(-D,0,0)、S4(0,-D,0)。假設(shè)目標(biāo)位于T處,T′為T在xoy平面上的投影。T的直角坐標(biāo)為(x,y,z),球坐標(biāo)為(R,φ,θ),R、φ、θ分別為目標(biāo)到基陣中心的斜距、方位角和俯仰角。其中,斜距R=Δt·c,Δt為信號從目標(biāo)到陣元S0的傳播時間,c為聲速。
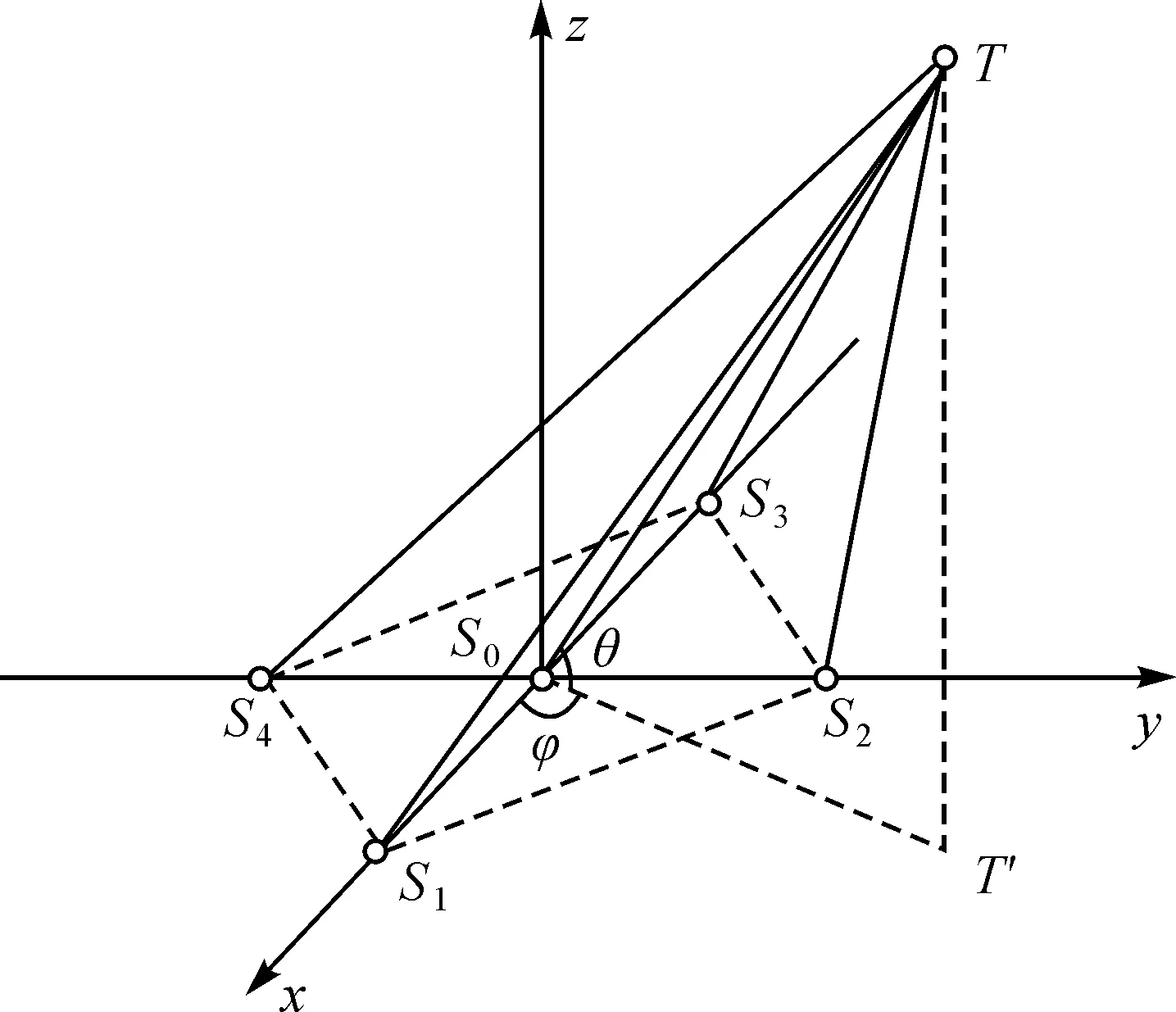
圖1 平面五元十字陣定位原理
為了確定目標(biāo)方位,USBL系統(tǒng)至少需要由3個基元構(gòu)成[14],令聲信號由目標(biāo)傳播到陣元Si的時延為τi,且τij=τj-τi,則三元陣可以通過以下公式計算目標(biāo)的方位[15]
(1)
十字正交陣與三元陣定位原理相同。圖1所示的五元十字陣中包括8個正交的三元陣:USBL012、USBL023、USBL034、USBL041、USBL123、USBL234、USBL341、USBL412(下標(biāo)的數(shù)字為所包含陣元的標(biāo)識),以及1個十字正交陣USBL1234。
在圖1中,S1、S2、S3、S4這4個陣元構(gòu)成平面四元十字陣,本文中標(biāo)識為USBL4。平面四元十字陣的定位方程為[5]
(2)
平面五元十字陣(本文中標(biāo)識為USBL5)是在平面四元十字陣的基礎(chǔ)上在基陣中心增加了1個陣元S0,其定位方程為[6]
(3)
2 本文方法
在利用到達(dá)時延差(time difference of arrival,TDOA)測量值對目標(biāo)進(jìn)行定向的USBL系統(tǒng)中,系統(tǒng)定位精度與傳感器和目標(biāo)之間的相對幾何位置關(guān)系有關(guān)[16],不同的陣型對目標(biāo)進(jìn)行定位的精度也存在差別。為此,本文通過下面步驟來對各基本陣型的初始定位坐標(biāo)進(jìn)行數(shù)據(jù)融合,以達(dá)到提高USBL系統(tǒng)定位精度的目的。
(1) 計算每個定位坐標(biāo)到其余坐標(biāo)的歐氏距離之和為
(4)

(2) 選擇到其余點(diǎn)距離和最小的那個坐標(biāo)點(diǎn)作為初始定位點(diǎn)的中心
(5)

Lj>η·L
(6)
式中,η為經(jīng)驗(yàn)參數(shù)。其值的大小決定著參與數(shù)據(jù)融合的有效點(diǎn)的個數(shù)。
(4) 對有效點(diǎn)的坐標(biāo)運(yùn)用LS(Least Square)方法,得到最終的定位結(jié)果。
3 仿真試驗(yàn)

(7)
通過式(8)來計算定位距離誤差的平均值和標(biāo)準(zhǔn)差,并對比各系統(tǒng)的定位精度
(8)
式中,N=360,為測試的次數(shù)。
改變接收信號的信噪比,測試USBL系統(tǒng)在不同信噪比條件下的距離定位精度。接收信號信噪比范圍設(shè)置為[-10 dB,20 dB],目標(biāo)與USBL系統(tǒng)之間的俯仰角取為θ=40°。測試結(jié)果如圖2所示。
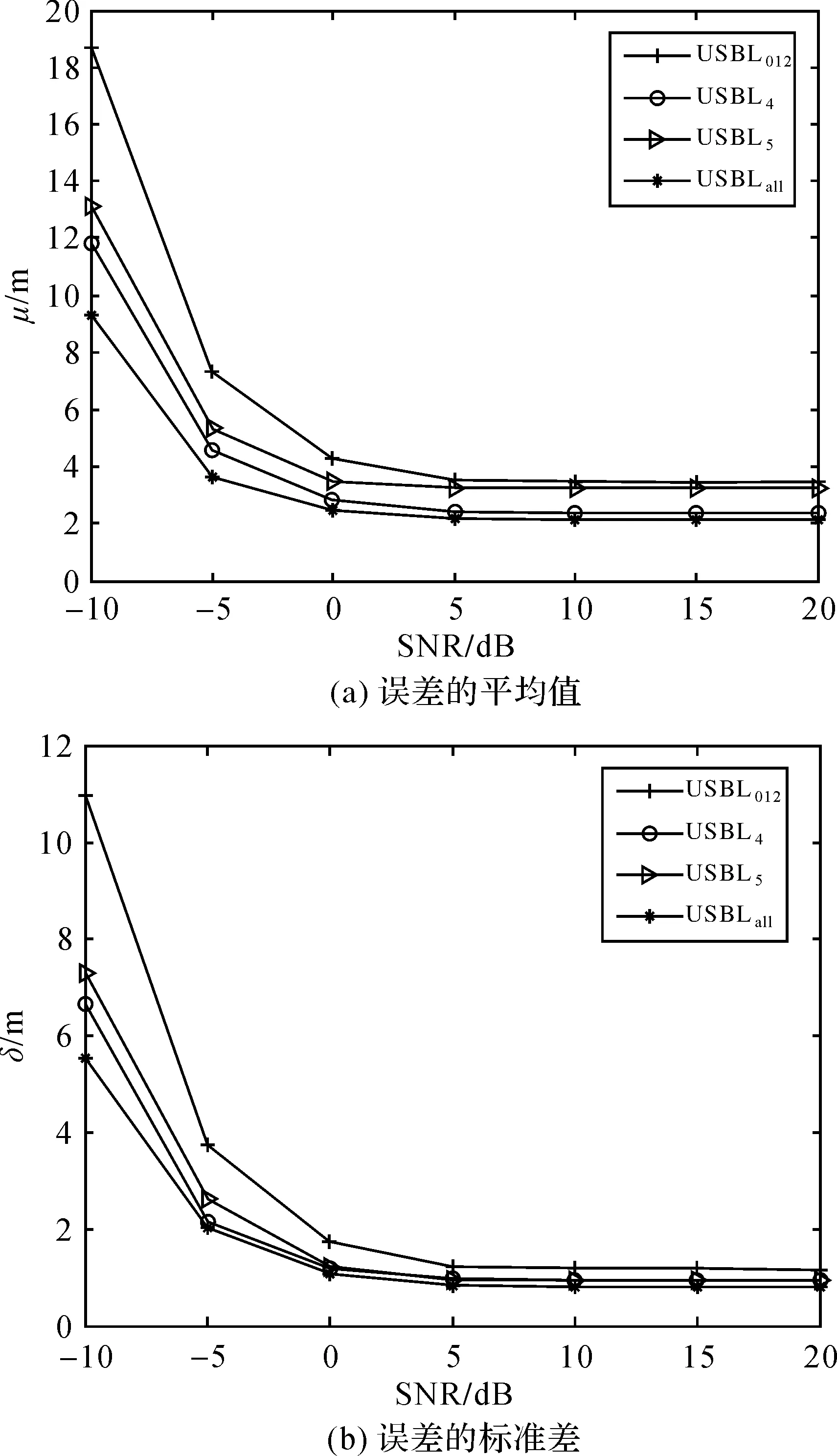
圖2 各陣型USBL系統(tǒng)定位精度與信噪比的關(guān)系
從圖2可以看出,在信噪比較高的情況下,各種基本陣型都具備較好的定位性能,但是在信噪比較低的情況下,各種基本陣型均容易出現(xiàn)較大的定位誤差。本文方法綜合了各基本陣型的定位結(jié)果,選擇了其中較可靠的定位結(jié)果進(jìn)行融合,使得系統(tǒng)總體的定位性能隨著信噪比的降低而下降得更為緩慢。試驗(yàn)結(jié)果說明,本文方法可以有效地提高低信噪比情況下USBL系統(tǒng)定位的精度和可靠性。
通過測量USBL系統(tǒng)在給定俯仰角情況下的定位精度來測試各陣型定位方法與俯仰角之間的關(guān)系,信噪比固定為-5 dB。試驗(yàn)結(jié)果如圖3所示。
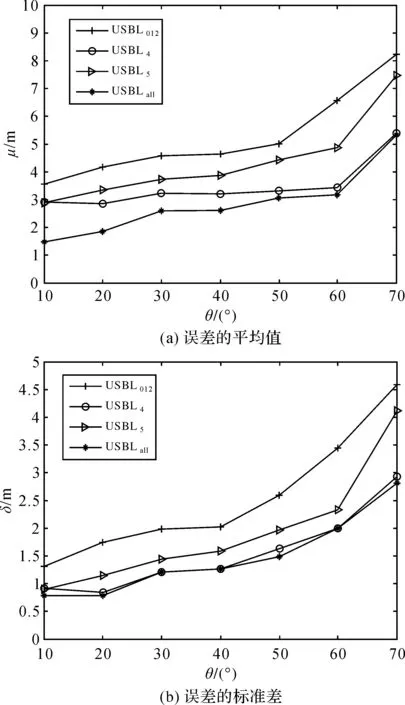
圖3 各陣型USBL系統(tǒng)定位精度與俯仰角的關(guān)系
由圖3可以看出,與另外3個陣型的USBL系統(tǒng)相比,USBLall系統(tǒng)在目標(biāo)位于不同俯仰角的情況中,距離定位誤差的平均值和標(biāo)準(zhǔn)差都相對較低,說明本文方法可以提高目標(biāo)位于不同俯仰角情況下USBL系統(tǒng)的可靠性和精度。
使用本文方法對目標(biāo)進(jìn)行定位,通過改變經(jīng)驗(yàn)參數(shù)η的取值來測試其對USBL系統(tǒng)定位精度的影響。試驗(yàn)中信噪比固定為-5 dB,目標(biāo)與USBL系統(tǒng)之間的俯仰角θ=40°。通過以1°為步長改變目標(biāo)方位角來改變目標(biāo)的真實(shí)坐標(biāo),令第i次定位過程中有εi個初始定位點(diǎn)被判斷為異常點(diǎn)。通過式(9)計算異常點(diǎn)的平均數(shù)
(9)
式中,N=360為測試的次數(shù)。同時,試驗(yàn)還通過式(7)和式(8)計算了不同經(jīng)驗(yàn)參數(shù)情況下定位距離誤差的平均值和標(biāo)準(zhǔn)差。試驗(yàn)結(jié)果如圖4所示。
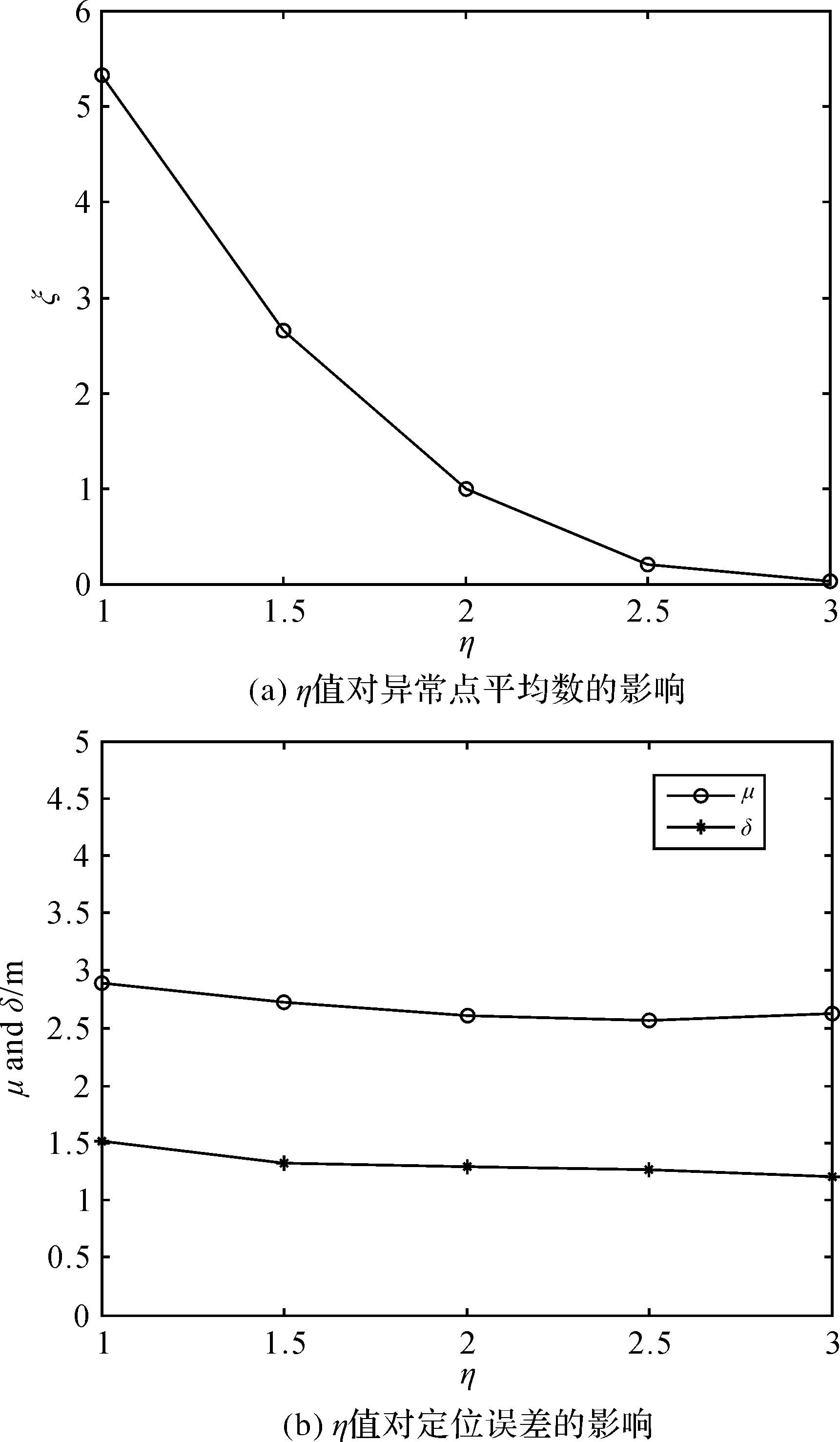
圖4 η值對距離定位誤差的影響
由圖4可以看出,η的不同取值對基本陣型定位結(jié)果中被視為異常點(diǎn)的個數(shù)有較大影響,但是其對最終數(shù)據(jù)融合后的USBL系統(tǒng)定位結(jié)果影響不大。不同的η值所得到的距離定位誤差,其平均值和標(biāo)準(zhǔn)差都保持相對穩(wěn)定。
4 結(jié) 語
本文提出了一種利用數(shù)據(jù)融合改進(jìn)USBL系統(tǒng)定位精度的方法。系統(tǒng)僅需要測量一次信號到達(dá)各陣元的時延,通過綜合各種陣型定位結(jié)果,即可達(dá)到提高USBL系統(tǒng)可靠性和定位精度的目的。通過仿真試驗(yàn)證明了本文提出的方法在不同信噪比和目標(biāo)處于不同俯仰角的情況下均能提高USBL系統(tǒng)的定位精度。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32