提高非量測相機高程精度關鍵技術分析
2018-08-03 02:59:06莊利有方德濤劉珊珊
測繪通報 2018年7期
莊利有,方德濤,劉珊珊,徐 嬋
(遼寧省攝影測量與遙感院,遼寧 沈陽 110034)
隨著近年來輕小型無人機技術的不斷成熟,無人機航空攝影測量技術的逐步完善,無人機航攝已經成為新興低空遙感影像獲取的重要手段,并具有良好的發展前景[1-4]。
但相對于載人機航攝系統來說,無人機航攝遙感系統由于飛行平臺與任務載荷自身特點,依然有以下幾個方面的問題。首先,無人機飛行平臺飛行姿態不穩定。無人機體積小、質量輕,在空中作業時極易受到氣流干擾,飛機姿態在俯仰方向和橫滾方向上頻繁變化,使曝光像片傾角超限,從而造成立體模型扭曲,高程誤差變大甚至超限。其次,無人機載荷小,只能搭載非量測數碼相機,這種相機有較大的鏡頭畸變,最大可達20~40像素。畸變會使物點、投影中心、像點三點不共線,同名光線不再相交,空間后方交會精度降低,重建物體的幾何模型變形。然后,無人機也無法搭載高精度曝光同步設備及GNSS/IMU系統,以致攝站位置精度存在較大誤差,影響平面與高程精度。最后,由于無人機航攝使用普通數碼相機的像幅小得多,這樣會造成攝影基線變短,基高比變小,從而使空中三角形不穩定,降低了解算的穩定性[5-8]。
針對以上問題,本文結合某丘陵地區無人機航攝數據,通過設計多種試驗方案,驗證基于非量測數碼相機的幾種技術與方法對高程精度的影響。試驗結果表明,相機標定、差分GPS和飛行構架航線等可以有效提高無人機航攝的高程精度,為今后生產提供有價值的參考。
1 原 理
1.1 相機檢校原理
從幾何上理解,數碼相機是一個四棱錐體,其頂點是相機物鏡的中心,其底面就是相機的成像平面(即影像)。由于在加工、安裝的過程中,相機的物鏡存在一定的誤差,使得物方平面上直線的影像不是直線,這種誤差稱為物鏡的畸變差。鏡頭畸變分為徑向變形、偏心變形和切向變形。徑向變形主要由透鏡的徑向曲率誤差造成像主點的徑向偏移,離中心越遠,變形越大;偏心變形和切向變形源于裝配誤差,分別由相機光學組件軸心無法共線和CCD面陣排列誤差造成[9]。3種變形共同導致了數字影像的畸變,其數學模型表示為
(1)
式中,(x,y)為像點坐標;(x0,y0)為像主點坐標;r為像點向徑;K1,K2,K3,P1,P2為畸變參數。用于測量的數碼影像,為了達到必要的測量精度,必須對相機進行檢校,以得到其畸變差參數,并對數碼影像進行畸變差糾正。
1.2 GPS輔助空三原理
GPS輔助空中三角測量是利用機載GPS和基站數據,采用載波相位技術進行事后差分處理,獲取高精度的曝光時刻攝站中心坐標,并將其作為帶權非攝影測量觀測值參與聯合平差,以達到減少野外控制點的目的[10]。
設以M為原點的地面坐標系中,GPS天線相位中心A和攝影中心S的坐標分別為(XA,YA,ZA)和(XS,YS,ZS),通過像片姿態角φ、ω、κ得到顧及動態GPS系統誤差的變換關系
(2)
式中,R為像片姿態角表示的正交變換矩陣;(u,v,w)為GPS相位中心A在像片坐標系中的坐標;(aX,aY,aZ)和(bX,bY,bZ)分別為GPS線性偏移系統誤差參數中固定部分和隨時間變化部分;t為曝光時刻;t0為參考時刻。將式(2)按泰勒級數展開至一次項并與光束法平差誤差方程聯立,構成GPS輔助光束法區域網平差的基礎方程。選取適當的權函數形式后,則可用最小二乘法求解物方坐標最或是值,獲得精確的外方位元素[11]。
1.3 構架航線區域網平差原理
構架航線又叫控制航線,是指在航攝區內飛行的若干條與常規航線近似垂直且航高不等的航線。對于一條構架航線與相鄰兩條常規航線之間的連接點,可設常規航線用i標號,構架航線用j標號,在原始誤差方程基礎上兩兩相減,消去待定坐標得到等效誤差方程
(3)

2 試 驗
2.1 試驗數據獲取
本試驗采用CW-10無人機平臺搭載SONYa7R非量測相機獲取低空遙感影像。在航飛前,借助于室內檢校場對相機進行標定[13],獲得相機檢校參數見表1。
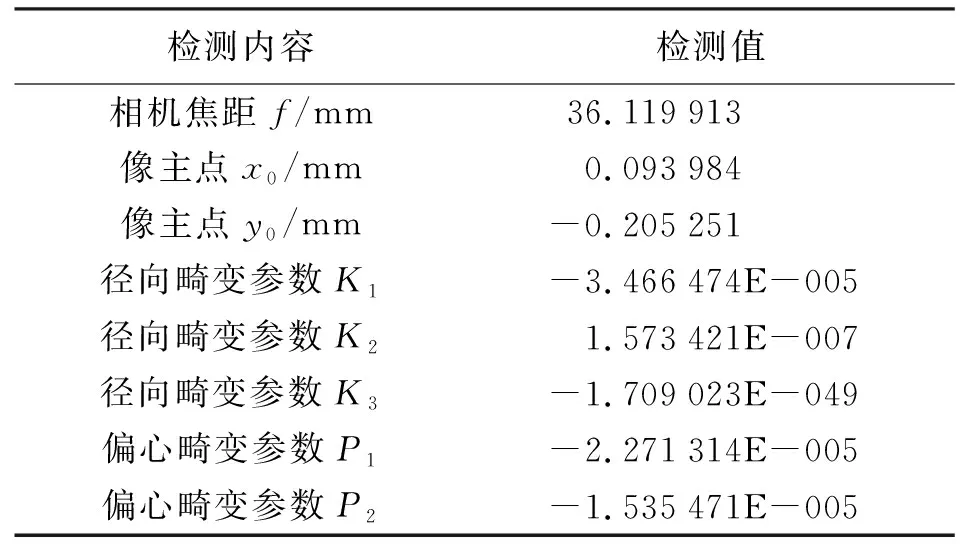
表1 相機檢校參數
本試驗選取遼寧省喀左縣內一處低山丘陵區作為研究區域,并將區域劃分成3個試驗區,分別是矩形的測區Ⅰ和條帶形狀的測區Ⅱ和測區Ⅲ。測區Ⅰ飛行常規航線11條,構架航線2條,獲取影像548張。測區Ⅱ和測區Ⅲ均飛行常規航線5條,構架航線5條,獲取影像分別為413張和432張。3個試驗區主要航攝飛行參數見表2。
3個試驗區像控點采用飛前布控與飛后布控相結合的方式,為了檢驗空三區域網平差的高程精度,在3個試驗區分別選取一定數量的檢查點。像控點與檢查點均利用遼寧CORS系統進行野外實地測量。
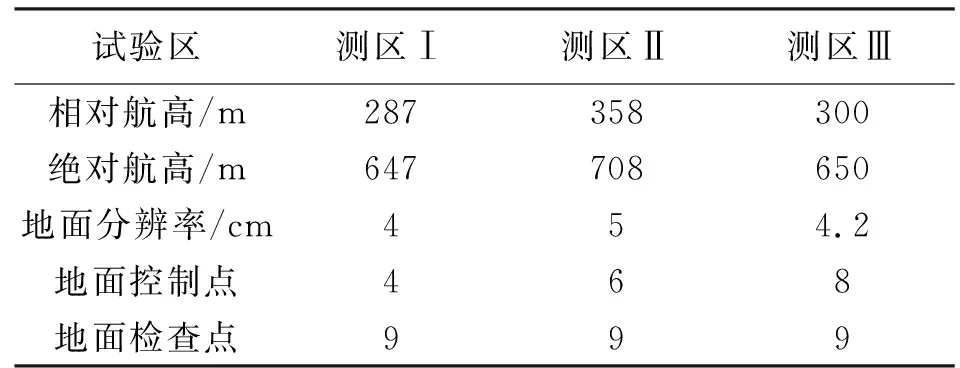
表2 試驗主要技術參數
2.2 試驗方案
本文設計了3組試驗:試驗1是為了驗證非量測相機標定對高程精度的影響;試驗2是為了驗證差分GPS對高程精度的影響;試驗3是為了驗證構架航線對高程精度的影響。其中試驗1對3種試驗方案進行了對比;試驗2和試驗3分別對2種方案進行了對比,具體試驗方案見表3。試驗1方案的控制點和檢查點分布如圖1所示。試驗2、3方案的控制點和檢查點分布如圖2所示。
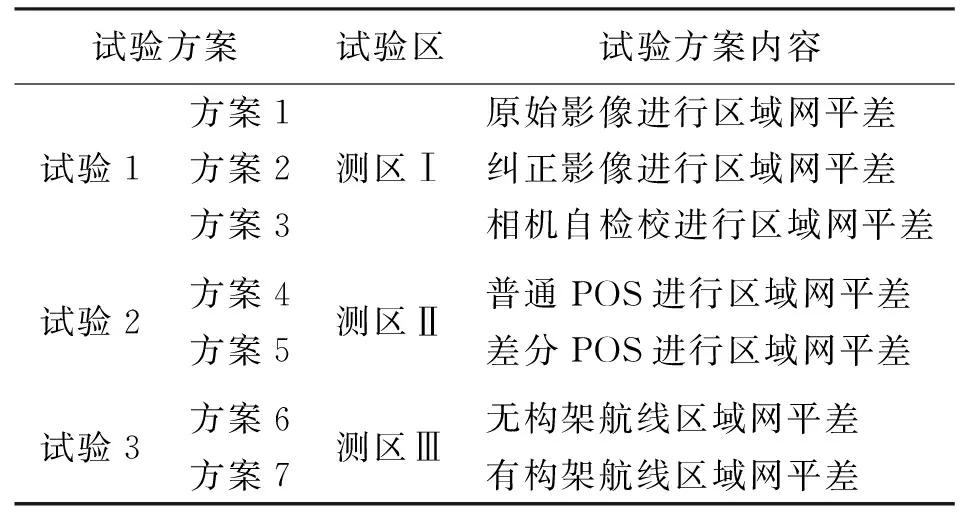
表3 試驗方案設計
圖1 試驗1控制點與檢查點分布
2.3 試驗結果分析
試驗1選用了四角四控制點方案,GPS參與區域網平差計算,且加入了GPS安裝偏移與坐標系偏移2個改正量,但沒有加入構架航線,這樣能剔除構架航線對高程影響因素,更好地反映相機檢校對高程精度的影響。試驗1的3種方案各檢查點高程誤差絕對值統計如圖3所示。

圖2 試驗2、3控制點與檢查點分布
方案1采用原始無人機航攝原始像片,其檢查點平面中誤差為0.295 m,高程中誤差為0.628 m;方案2采用糾正過畸變差像片,其檢查點平面中誤差為0.226 m,高程中誤差為0.302 m;方案3采用原始航攝像片,在區域網平差過程中進行相機自檢校,其檢查點平面中誤差為0.223 m,高程中誤差為0.332 m。
圖3 試驗1檢查點高程誤差統計
試驗2測區是條帶形狀區域,選用四角加中間六控制點方案,5條航攝航線和5條構架航線,GPS參與區域網平差計算,用相機自檢校功能進行畸變差糾正,只是方案4采用原始POS數據,方案5采用后差分POS數據作為攝站坐標。試驗2的2種方案各檢查點高程誤差絕對值統計如圖4所示。
圖4 試驗2檢查點高程誤差統計
方案4檢查點平面中誤差為0.103 m,高程中誤差為0.365 m;方案5檢查點平面中誤差為0.163 m,高程中誤差為0.129 m。
試驗3選用四角加中間共八控制點方案,2種方案均采用差分GPS輔助區域網平差,用相機自檢校功能進行畸變差糾正,只是方案6采用常規航攝航線進行區域網平差,方案7加入5條構架航線參與區域網平差。試驗3的2種方案各檢查點高程誤差絕對值統計如圖5所示。方案6檢查點平面中誤差為0.234 m,高程中誤差為1.03 m;方案7檢查點平面中誤差為0.137 m,高程中誤差為0.07 m。

圖5 試驗3檢查點高程誤差統計
由以上試驗可以看出:
(1) 無論是空三前畸變糾正影像還是空三時進行相機自檢校,只要經過畸變差糾正,其區域網平差的高程精度明顯優于未糾正畸變的原始影像平差,且高程精度變化相對平穩,原始影像平差的高程誤差隨機性較大。
(2) 事前畸變差糾正與相機自檢校在平面精度和高程精度上相差不大,但相機自檢校方便快捷,有著更高的工作效率優勢,對于應急測繪保障有著更積極的作用。
(3) 無人機自帶GPS本身誤差較大,導致成圖精度不高,差分GPS輔助光束法區域網平差的高程精度提升明顯。使用無人機進行大比例尺航攝時,應盡量選用帶差分GPS設備的無人機平臺。如果無差分GPS,可嘗試精密單點定位技術GPS輔助空三[14],以提高高程精度。
(4) 對于條帶形狀測區,構架航線可以大幅提升其高程精度,尤其是條帶兩端的高程精度。因此在進行帶狀圖無人機航攝時,保證航程的前提下盡量采用構架航線,不僅可以提高高程精度,還能有效減少外業控制點數量。
3 結 語
本文通過對基于非量測相機的無人機航攝系統理論研究與試驗,分析了相機檢校、差分GPS和構架航線對無人機測繪大比例尺地形圖高程精度的影響,論證了相機檢校、差分GPS和構架航線可以有效提高區域網平差高程精度,在生產中推廣應用有著積極意義。本文只討論了3種方法各自的作用,并未討論多方法對區域網平差的影響,也未將這些方法提高高程精度進行量化,這些工作可在下一階段繼續研究。