一種嫦娥二號CCD影像同名點匹配方法
2018-08-03 02:58:54唐中林
測繪通報 2018年7期
李 勝,詹 亮,2,唐中林
(1. 新疆維吾爾自治區測繪科學研究院,新疆 烏魯木齊 830002; 2. 成都理工大學,四川 成都 610059; 3. 中國科學院成都生物研究所,四川 成都 610059)
影像匹配技術向來是圖形圖像處理、GIS及攝影測量與遙感等領域的重點研究方向之一,同時也是其基礎性的研究領域[1-3]。目前,影像匹配算法基本可以分為基于影像灰度值的匹配算法、基于圖像特征(包括成像紋理、顏色、光譜、幾何等特征)的匹配算法,以及基于人工智能技術的圖像理解匹配算法[2,4]。由于嫦娥二號線陣式CCD相機在成像時每行影像單獨曝光,同時受到前、后視線陣的拍攝角度、太陽光線入射角等多重因素的影響,容易造成影像間存在部分亮度差異[5]。此外,由于月表影像與地表影像存在較大差異,月表影像地表覆蓋較為單一,以隕石撞擊坑為主,而且撞擊坑不存在顯著的幾何特征,同時也沒有顯著的線性地物交叉點,月面影像呈現紋理單一、灰度變化不明顯等特征,這給基于月球影像的匹配帶來較大的難度。
目前我國對嫦娥二號CCD影像的預處理技術尚處于探索階段,在同名像點提取、影像匹配技術研究方面主要是采用基于圖像特征的匹配方法,如陳坤等基于SIFT算法,結合圖像特征對嫦娥二號CCD影像進行了匹配[6];楊阿華等采用SIFT算法,結合嫦娥二號的同軌月圖特征,對嫦娥二號影像進行了自動提取與匹配[7]。這些研究都取得了一定的成果,但也具有一些不足。針對嫦娥二號CCD影像存在體量大、紋理單一、幾何特征不明顯、地物畸變、前后視影像存在亮度差異等問題,影像同名點匹配技術依舊是對嫦娥二號預處理時需要攻克的難點問題之一。本文針對上述問題,提出一種簡單的基于拉普拉斯算子與圖像灰度的影像匹配方法,選取低通濾波器對影像進行平滑去噪,濾除圖像高斯噪聲、孤立點噪聲,使圖像平滑;再根據月面撞擊坑的幾何特征,如邊緣陡峭及部分邊緣變化較緩的地方,選取拉普拉斯算子對平滑處理后的影像進行圖像邊緣提取及增強,增強影像灰度突變部分,降低影像低頻分量;最后利用基于NCC算法的灰度匹配算法進行影像同名點匹配,同時降低匹配誤差,得到嫦娥二號的影像配準成果。
1 圖像灰度變換及圖像增強
1.1 空間域低通濾波
空間域低通濾波法是一種建立在卷積運算基礎上的空間域處理法,通過圖像鄰域點來平滑圖像中孤立的噪聲點,以此來除去噪聲[5]。利用影像某一像元(a,b)附近鄰域Ω內所有像素的灰度值對該點的灰度值f(a,b)進行線性預測,可得到估計值[8]為
(1)
式中,Ω為某一像元的鄰域范圍;f(a-i,b-j)為鄰域內各點的灰度值;N為鄰域大小;k為權重系數。
空域低通濾波是較為常用的圖像增強技術,其對高斯噪聲的去除及圖像平滑處理具有較好的應用效果。影響空域低通濾波器濾除性能的主要因素一是濾波函數,二是濾波窗口的大小,因此濾波函數的選取及設定濾波窗口的大小在圖像增強處理時就顯得尤為關鍵。空域低通濾波器在濾除高斯噪聲點的同時,也使得圖像目標邊緣變得模糊,當濾波窗口值越大時,圖像平滑處理效果越明顯,同時圖像輪廓的模糊度就越高,可能會造成幾何特征不明顯或消失[5]。因此,在實際應用過程中,常常根據地物目標大小及應用需求,選擇合理的低通濾波函數及窗口大小值。
1.2 拉普拉斯算子
拉普拉斯算子(Laplace operator),是n維歐幾里得空間中的一種二階微分算子,一般圖像增強技術對于陡峭的邊緣和緩慢變化的邊緣很難確定其邊緣線位置,但拉普拉斯算子卻可在圖像邊緣處產生一個陡峭的零交叉(二階導數在圖像邊緣產生的正峰和負峰之間的過零點,簡稱為零交叉),因此其對孤立點或端點更為敏感,經常用于圖像的銳化及邊緣增強處理[4,9]。一個連續的二元函數f(x,y),其中x、y表示平面上的笛卡爾坐標,其拉普拉斯運算定義為[9-10]
(2)
為更適合于數字圖像處理,拉普拉斯算子也可以離散形式表示為
g(i,j)=4f(i,j)-f(i+1,j)-f(i-1,j)-
f(i,j+1)-f(i,j-1)
(3)
其卷積形式可以表達為

(4)
式中,i,j=1,2,3,…;k=1;l=1。濾波模板取樣為
(5)
拉普拉算子的模板表示如下
(6)
式中,Gx為離散拉普拉斯算子的模板;Gy為其拓展模板。由于拉普拉斯算子具有旋轉不變性,是一種各向同性濾波器,線性和位移不變。同時由于其對于圖像邊緣的敏感性,能夠解決其他算子(如Sobel、Prewitt等)解決不了的諸如邊緣陡峭、邊緣變化緩慢等問題[11],這對于解決嫦娥二號CCD影像灰度變化陡峭、圖像邊緣變化較緩慢的問題及在影像上對孤立的點狀及線狀地物的邊緣提取和識別是十分有利的。與其他梯度算子一樣,拉普拉斯算子也會增加圖像中的噪聲,因此為了更有效提取線狀及點狀地物,在利用拉普拉斯算子進行圖像邊緣提取之前對圖像作平滑降噪處理也是十分必要的。
2 圖像灰度匹配
基于灰度的影像匹配是一種直接采用匹配圖像上的灰度信息來進行圖像間的相似度度量方法[12]。選取合適的相似度度量算法是基于灰度的圖像匹配關鍵所在。常用的相似度度量算法包括:
(1) 平均絕對差算法(mean absolute difference,MAD)為
(7)
(2) 絕對差和算法(sum of absolute difference,SAD)為
(8)
(3) 誤差平方和算法(sum of squared difference,SSD)為
(9)
(4) 積相關(Product correlation,Prod)為
(10)
(5) 歸一化積相關算法(Normalized Cross-Correlation,NCC)為
(11)
上述算法中,D(u,v)為源圖像中與模板對應區域的能量,它與像素位置(u,v)有關,n×n為模板大小,yij為模板圖像中(i,j)像元的灰度值大小,xi+u,j+v為搜索圖中f(u,v)的(u,v)像元點的圖像灰度,E(Su,v)為(u,v)處子圖的平均灰度值,E(T)為模板的平均灰度值。
上述5種算法中,MAD、SAD、SSD原理基本一致,只是公式上略有改動,都是在影像中以(u,v)為左上角,取n×n大小的子圖,計算其余模板的相似度,遍歷整個匹配圖,然后在所有能找到的子圖中提取與模板最為相似的子圖作為最終的匹配結果。由于算法是通過度量圖像矢量x(u,v)與y之間的距離來測算匹配精度的,由公式可知平均差D(u,v)(或絕對差、誤差平方和)越小,表明越相似,極小值為0,因此只需要找到D(u,v)的最小值即可確定相匹配的子圖位置;Prod、NCC算法與上述幾種距離度量算法類似,依然是利用子圖與模板的灰度值來作運算,通過歸一化的相關性度量公式來計算二者之間的匹配程度,R(u,v)值越大越好,極大值為1,R(u,v)值越接近1時,圖像相似度越高[12-13]。
通過比較上述幾種灰度匹配算法在不同條件下的匹配精度,有助于選取適用于嫦娥二號影像匹配的算法。在模板圖像相同、灰度閾值固定的前提下,以圖像亮度變化、圖像邊緣模糊度為試驗變量,計算不同算法的匹配精度,同時試驗在正常條件下的運算情況,可以得出:當圖像亮度值產生變化時,MAD、NCC算法對抗亮度變化性能表現良好,對圖像的灰度匹配沒有顯著影響;在對影像隕石撞擊坑邊緣模糊的情況下,SSD、NCC算法表現出其優勢,對隕石撞擊坑的變換依舊能夠準確識別,依然能夠準確地實現圖像灰度匹配;在圖像亮度、清晰度均正常的條件下,MAD、SAD、SSD算法運算過程較為簡單,但運算量較大,對噪聲敏感度較高,Prod、NCC運算過程相對復雜,但運算量相對較小,對噪聲敏感程度低。比較測試結果,鑒于嫦娥二號影像在亮度及清晰度方面的實際情況,本文后期將選取NCC算法作為影像的灰度匹配算法。
3 試驗及結果分析
本文影像匹配試驗基于ENVI/IDL8.2平臺,選取兩軌嫦娥二號CCD立體像對,影像編號為:B070406/F070406、B080407/F080407,影像空間分辨率為7 m,CCD影像前、后視影像線性紋理信息不顯著,亮度差異較為明顯。在進行同名點提取之前,對影像進行了地理編碼及利用低通濾波器對試驗影像進行圖像平滑去噪,影像匹配流程如圖1所示。

圖1 影像匹配流程
3.1 影像平滑去噪
根據試驗流程,首先對嫦娥二號CCD影像進行數據分析,發現影像上的高斯噪聲、孤立噪點較為密集,同時基于后期對圖像作增強處理(基于拉普拉斯算子的圖像增強)時的需求,結合算法的復雜性和運算效率,本文選取空間域低通濾波作為嫦娥二號CCD影像去噪及平滑的最佳濾波器。本文選取低通濾波函數,采用卷積核為3×3的低通濾波器對試驗影像進行濾波處理,通過濾波處理后的影像較濾波處理前的影像圖像灰度更平滑,噪聲大面積減少。去噪效果如圖2所示。
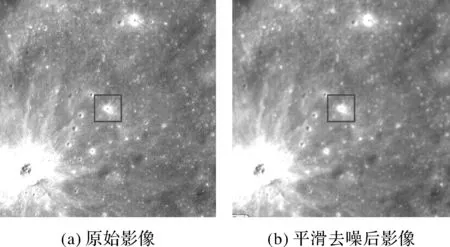
圖2 CE-2 CCD影像平滑去噪處理
3.2 影像邊緣提取及增強
針對嫦娥二號CCD影像孤點及現狀地物分布較廣、圖像灰度變化顯著、隕石撞擊坑邊緣變化緩慢等特點,結合拉普拉斯算子各向同性濾波器的特性,本文在ENVI/IDL8.2平臺上,采用拉普拉斯算子,卷積核設置為3×3,對濾波處理后的平滑影像進行了圖像邊緣增強及提取。處理效果如圖3所示。
3.3 影像灰度匹配及誤匹配點剔除
在對嫦娥二號CCD影像進行地理編碼、平滑去噪、邊緣增強等圖像預處理工作后,本文采用歸一化積相關算法(NCC)灰度匹配算法,以9×9的窗口大小對影像進行了同名點匹配試驗。從選取的兩軌嫦娥二號CCD立體像對試驗影像中分別獲得了436、431個同名像點。利用ENVI軟件相關控制點糾正模塊,基于控制點的誤差參數,對誤匹配的同名點進行檢查并剔除,經檢驗,誤匹配點分別為6、8個,影像匹配準確率高達98%,影像匹配準確率較高。圖像處理示例如圖4所示。
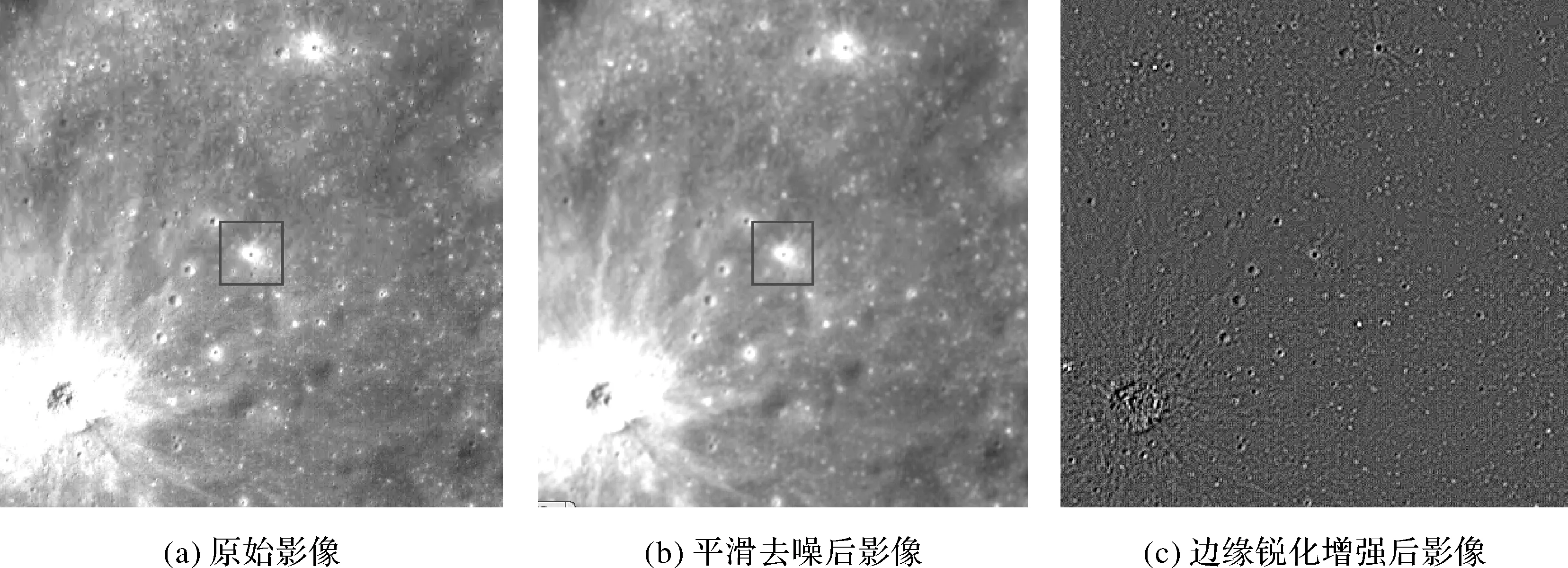
圖3 基于拉普拉斯算子的CE-2 CCD影像邊緣增強處理

圖4 CE-2 CCD影像整軌月圖對應前、后視影像匹配局部效果圖
3.4 與SIFT算法的提取效率比較
為了驗證本文提出方法的準確性及優越性,基于常用的SIFT、RANSAC算法(算法a)對同一影像同一地區進行了同名點匹配處理[14-16],與基于拉普拉斯算子與圖像灰度的匹配算法(算法b)對比結果見表1。
從表1可以看出,對于嫦娥二號CCD影像來說,基于拉普拉斯算子與灰度匹配的技術方案,在提取精度及效率方面明顯表現出其優勢性。
4 結 語
針對嫦娥二號CCD影像的灰度特性,在進行影像同名點匹配時,本文提出了一種基于拉普拉斯算子與灰度匹配的嫦娥二號CCD影像同名點匹配方法,并且通過隨機選取一軌嫦娥二號影像立體相對,基于ENVI/IDL8.2平臺進行了同名點匹配。并且與SIFT算法的提取效率進行對比,驗證了該方法的可行性及精確性。但在進行DEM提取的過程中,對同名點數量、像元誤差精度有更為嚴格的要求,本文所提出的方法還有待進一步驗證及進行更為深入的研究。

表1 兩種算法進行特征點提取的比較