液壓推進型水下機器人的運動控制方法研究*
2018-08-03 04:19:50田烈余張培豪陳宗恒
機電工程 2018年7期
關鍵詞:模型
田烈余,周 鋒,張培豪,陳宗恒
(1.廣州海洋地質調查局,廣東 廣州 510760;2.浙江晶盛機電股份有限公司,浙江 上虞 312300;3.浙江大學 海洋學院,浙江 舟山 316021)
0 引 言
ROV(remotely operated vehicle)作為海洋科學考察、資源開發及水下工程等領域的重要作業工具,其運動控制仍是國內外研究熱點之一[1]。而液壓推進型ROV由于其功率密度大和調速性能好,廣泛應用于水下大功率作業。對于ROV的運動控制方法研究,目前已有許多重要成果。TEHRANI[2]使用PID控制器實現了“DENA”ROV的深度控制;HOU和CHEAH[3]采用PD控制器實現了多個水下機器人的編隊控制;此外,也有學者將PID控制方法與其他控制方法結合,如TANG等[4]將PID控制算法與非線性模糊補償結合,在ROV定深控制時成功抑制了超調;MA等[5]引入蟻群算法對PID參數進行在線優化,實現了ROV的定深、定高和定向控制。
然而大多ROV控制算法以研究電推進器為主,針對液壓推進器的控制研究較少。液壓推進控制系統與電機控制相比,非線性特點更為顯著。比例電磁閥的磁滯現象以及液壓參數波動(油溫和壓力等)的存在使液壓推進器的開環控制性能相對較差。多個推進器的不一致容易使ROV在定向控制中產生較大控制偏差,對潛器的運動和作業能力產生較大影響。
本文將提出一種將液壓推進器轉速PI控制與ROV艏向PID控制相結合的控制方法。
1 水下機器人運動學建模
海馬號ROV的固定坐標系和艇體坐標系(運動坐標系)如圖1所示。

圖1 海馬號ROV的固定坐標系和艇體坐標系

(1)
式中:J(η)—坐標轉換矩陣。
在艇體坐標系中,ROV運動的動力學方程可采用基于Fossen大綱非線性模型表示[8]:

(2)
式中:M為質量慣性矩陣;C(v)—科氏力和向心力矩陣;D(v)—水動力阻尼矩陣;g(η)—重力和浮力產生的力和力矩向量;τ—推進系統產生的控制力和力矩;Δf—未知干擾力/力矩向量。
海馬號有8個液壓推進器,其中4個水平推進器為矢量布置,4個垂直推進器推力方向與XY平面夾75度角,推進系統產生的推力可表示為向量u=[u1,u2,u3,u4,u5,u6,u7,u8]T。由于液壓型ROV本身質量大且浮心位于重心上方,在橫傾和縱傾方向有足夠大的復原力矩,故ROV控制系統較多采用簡化四自由度模型[9-10]。故ROV所受力和力矩向量τ(忽略橫傾角和縱傾角控制)可表示為:
τ′=Bu=[B1,B2]u
(3)
其中:
τ′=[X,Y,Z,N]T
式中:α—水平推進器推力方向與X軸夾角;β—垂直推進器推力方向與XY平面的夾角;d—垂直推力與Y軸的作用距離;l—水平推力與重心間的作用距離。
2 運動控制器設計
ROV的定向控制原理如圖2所示。
工程建設中,造價全過程控制與管理非常重要,有效實施此項工作,提高項目經濟效益,從根本上保障項目施工的安全與經濟性。未來項目建設中,要貫徹落實工程造價全過程控制與管理,滲透到項目建設的每一環節,對建筑工程實現全過程管控,對于項目質量的保障具有深遠意義。
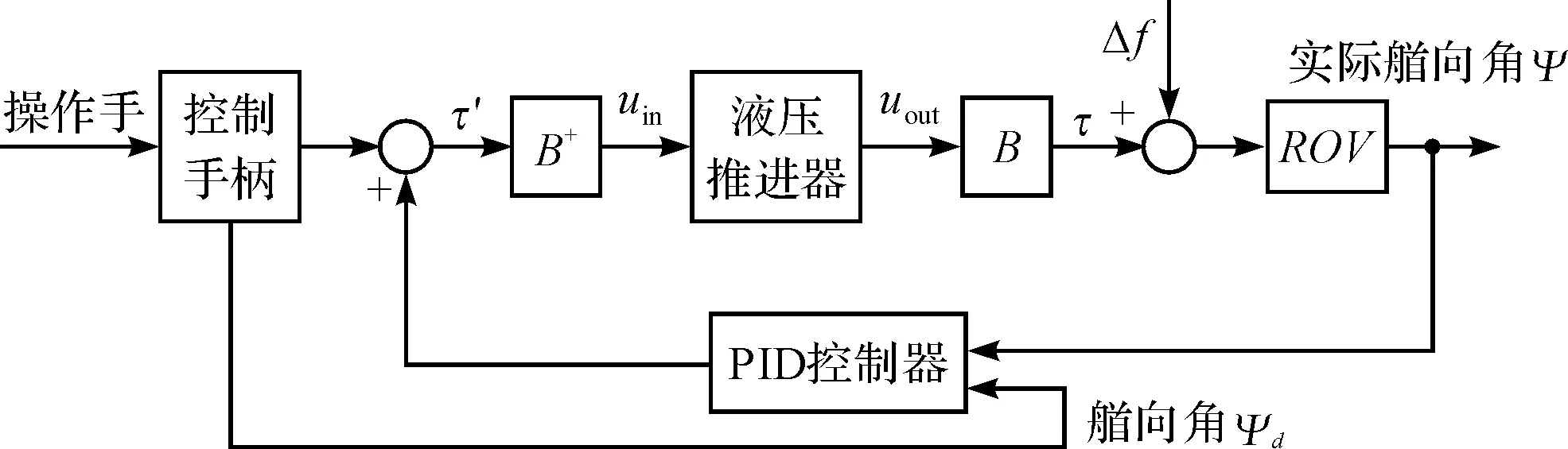
圖2 ROV的定向控制原理
期望艏向角ψd由操作手給定,通過PID控制器可得到一個輸出轉矩τ’,再經過推力分配矩陣B+得出每個推進器的輸入力大小。常規PID控制器在液壓推進器上采用開環控制,并不考慮磁滯現象等的影響,因此由推進器不一致產生的控制誤差不能忽視。
為解決控制輸入uin與推進器推力輸出uout間由電磁滯環帶來的不一致問題,可將轉速PI控制器應用于每個螺旋槳控制。
考慮到螺旋槳推力與轉速平方成正比(推力比例系數為Cf),本研究以水平螺旋槳u1為例,設計其控制結構如圖3所示。

圖3 水平螺旋槳的PI控制器
3 仿真研究
本研究在Matlab/Simulink中建立ROV運動控制仿真模型,如圖4所示。

圖4 ROV運動控制的仿真模型
該模型主要由控制手柄輸入、定向PID控制器、推力分配及合成矩陣、螺旋槳和ROV六自由度模型組成。其中,控制手柄為四自由度模型,ROV定向PID控制器為單輸入單輸出控制器。
為減小電磁滯環等干擾的影響,本研究在ROV推進器模型中增加了圖2所示的PI控制器以精確控制轉速及推力。為增加仿真對比,常規PID控制的推進器模型采用推進器開環比例控制,同時在閥控螺旋槳模型中增加了隨機的20 kgf幅值的推力干擾。
仿真主要參數如表1所示。

表1 ROV控制仿真參數
ROV的控制手柄輸入在仿真過程中仍保持τ′=[4 000,0,0,0]T,艏向PID控制器設定值為0(控制器參數Kp=6 000,Ki=0,KD=2 500)。同時增加了干擾向量Δf=[0,0,0,0,0,1 000]T,作用時間在10 s~12 s內,一階濾波常數為1 s。
艏搖干擾力矩如圖5所示(干擾向量作用時間較短,一階濾波后峰值約860 Nm)。

圖5 ROV定向控制的艏搖干擾力矩
ROV水面定向運動時的偏航角仿真結果對比(普通PID和復合PID控制器)如圖6所示。

圖6 ROV定向控制的偏航角仿真結果
艏左水平推進器轉速仿真結果對比如圖7所示。

圖7 ROV定向控制的艏左水平推進器仿真結果
由仿真曲線可知:復合PID控制器在干擾扭轉作用時偏航角變化波動更小,并且在干擾消失后能快速恢復至設定值。這主要是由于轉速控制閉環使螺旋槳轉速有更好的穩態精度及更快的響應時間。
ROV原地轉艏90°和180°的階躍響應仿真結果分別如圖(8,9)所示。

圖8 ROV轉艏90度階躍仿真結果

圖9 ROV轉艏180度階躍仿真結果
由圖可知:兩種控制器穩態精度和響應速度相差不大,但復合PID控制器有更小的超調量。
4 結束語
ROV液壓推進器比例滯環和轉速控制精度誤差會引起定向控制產生較大的角度偏差,改善推進器本身的控制特性是解決該問題的方法之一。因此本文在Matlab/Simulink中建立了海馬號水下機器人的六自由度動力學模型,并設計了帶螺旋槳轉速PI閉環的復合PID定向控制器以改善推進器固有特性。
仿真結果表明:與常規PID控制器相比,本文所提出的復合PID控制器有更好的控制性能,可顯著減小由液壓推進器推力不一致以及外界干擾引起的偏航角波動,提高定向控制精度,在ROV轉艏控制時偏航角具有更小的超調量。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19