分布式后驅(qū)電動(dòng)客車(chē)驅(qū)動(dòng)防滑系統(tǒng)設(shè)計(jì)及驗(yàn)證*
2018-08-03 04:25:16梁志偉朱紹鵬劉震濤方子?xùn)|寧曉斌
機(jī)電工程 2018年7期
關(guān)鍵詞:模型
梁志偉,朱紹鵬*,劉震濤,方子?xùn)|,厲 蔣,寧曉斌
(1.浙江大學(xué) 動(dòng)力機(jī)械及車(chē)輛工程研究所,浙江 杭州 310027;2.杭州伯坦科技工程有限公司,浙江 杭州 310012;3.浙江工業(yè)大學(xué) 車(chē)輛工程研究所,浙江 杭州 310014)
0 引 言
采用輪轂/輪邊電機(jī)的分布式驅(qū)動(dòng)電動(dòng)汽車(chē),因其各輪驅(qū)動(dòng)力可獨(dú)立實(shí)時(shí)控制,具有明顯的整車(chē)動(dòng)力學(xué)控制優(yōu)勢(shì),近年來(lái)成為電動(dòng)汽車(chē)領(lǐng)域的研究重點(diǎn)。相比于傳統(tǒng)集中式單電機(jī)驅(qū)動(dòng)車(chē)輛,分布式驅(qū)動(dòng)電動(dòng)汽車(chē)具有多電機(jī)控制自由度高、可控裕度大等優(yōu)點(diǎn)。因此,在多電機(jī)分布式驅(qū)動(dòng)基礎(chǔ)上設(shè)計(jì)的驅(qū)動(dòng)防滑系統(tǒng),在消除單個(gè)驅(qū)動(dòng)車(chē)輪的打滑現(xiàn)象后,還應(yīng)充分發(fā)揮分布式驅(qū)動(dòng)優(yōu)勢(shì)[1-3],通過(guò)協(xié)調(diào)分配多個(gè)驅(qū)動(dòng)輪轉(zhuǎn)矩,進(jìn)一步提高整車(chē)行駛穩(wěn)定性。
國(guó)內(nèi)外不少學(xué)者針對(duì)分布式驅(qū)動(dòng)電動(dòng)小型乘用車(chē)開(kāi)展了驅(qū)動(dòng)防滑系統(tǒng)設(shè)計(jì),并通過(guò)實(shí)車(chē)試驗(yàn)驗(yàn)證了設(shè)計(jì)的控制策略的有效性:文獻(xiàn)[4]設(shè)計(jì)了一種轉(zhuǎn)矩矢量控制器;文獻(xiàn)[5]設(shè)計(jì)了一個(gè)多滑模面控制器來(lái)控制車(chē)輛的滑轉(zhuǎn)率;文獻(xiàn)[6]提出了一種將最佳滑轉(zhuǎn)率比例積分控制和動(dòng)態(tài)等轉(zhuǎn)矩驅(qū)動(dòng)控制相結(jié)合的控制方法。
上述研究都是針對(duì)分布式驅(qū)動(dòng)小型乘用車(chē)開(kāi)展的,對(duì)分布式驅(qū)動(dòng)電動(dòng)客車(chē)研究的關(guān)注度相對(duì)較低,相關(guān)的驅(qū)動(dòng)防滑研究還很少。基于滑模控制,文獻(xiàn)[7-8]分別針對(duì)四輪輪邊電機(jī)驅(qū)動(dòng)電動(dòng)客車(chē)、電動(dòng)鉸接客車(chē),設(shè)計(jì)了驅(qū)動(dòng)防滑系統(tǒng),并通過(guò)仿真分析驗(yàn)證了策略的有效性。由于分布式驅(qū)動(dòng)電動(dòng)客車(chē)的驅(qū)動(dòng)防滑實(shí)車(chē)試驗(yàn)相比于小型乘用車(chē)對(duì)成本、場(chǎng)地、駕駛員素質(zhì)等都有更高的要求,故相關(guān)研究基本處于仿真驗(yàn)證階段,而仿真驗(yàn)證必須采用準(zhǔn)確的分布式驅(qū)動(dòng)車(chē)輛模型才具有實(shí)際驗(yàn)證意義。
針對(duì)客車(chē)分布式驅(qū)動(dòng)防滑功能需求,本文設(shè)計(jì)包括滑轉(zhuǎn)率估算、單輪驅(qū)動(dòng)防滑、雙輪轉(zhuǎn)矩協(xié)調(diào)控制的驅(qū)動(dòng)防滑系統(tǒng)。
1 分布式后驅(qū)電動(dòng)客車(chē)建模及實(shí)車(chē)試驗(yàn)
1.1 整車(chē)模型及基本驅(qū)動(dòng)力分配模型
分布式后驅(qū)電動(dòng)客車(chē)模型主要包含客車(chē)整車(chē)模型及基本驅(qū)動(dòng)力分配模型,由重型車(chē)輛動(dòng)力學(xué)仿真軟件TruckSim與控制系統(tǒng)仿真軟件Matlab/Simulink聯(lián)合仿真建模完成。分布式后驅(qū)電動(dòng)客車(chē)實(shí)車(chē)參數(shù)如表1所示。

表1 分布式后驅(qū)電動(dòng)客車(chē)實(shí)車(chē)參數(shù)
根據(jù)表1中,在TruckSim中建立客車(chē)整車(chē)模型如圖1所示。

圖1 TruckSim客車(chē)模型
本研究在Simulink中建立基本驅(qū)動(dòng)力分配模型、電機(jī)模型、駕駛員模型、“人-車(chē)-路”狀態(tài)觀測(cè)模型。
基本驅(qū)動(dòng)力分配模型如圖2所示。

圖2 基本驅(qū)動(dòng)力分配模型
基本驅(qū)動(dòng)力分配模型的作用是按照駕駛需求合理分配左右后輪的驅(qū)動(dòng)力,例如當(dāng)客車(chē)轉(zhuǎn)彎時(shí),該模型控制分配到左右后輪兩個(gè)驅(qū)動(dòng)電機(jī)的轉(zhuǎn)矩,從而實(shí)現(xiàn)差速差力的功能,保證車(chē)輛正常轉(zhuǎn)彎,具體控制策略可參考文獻(xiàn)[9-10]。
本研究使用TruckSim、Matlab/Simulink搭建了分布式驅(qū)動(dòng)電動(dòng)客車(chē)驅(qū)動(dòng)力控制聯(lián)合仿真系統(tǒng),總體框架如圖3所示。

圖3 分布式后驅(qū)電動(dòng)客車(chē)驅(qū)動(dòng)力控制聯(lián)合仿真系統(tǒng)
1.2 實(shí)車(chē)試驗(yàn)與仿真結(jié)果對(duì)比驗(yàn)證
本研究將1.1節(jié)設(shè)計(jì)的Simulink基本驅(qū)動(dòng)力分配模型轉(zhuǎn)換成C程序?qū)嵮b到后輪裝有兩個(gè)輪轂電機(jī)的電動(dòng)客車(chē)(整車(chē)參數(shù)與表1相符)的整車(chē)控制器中,來(lái)分配其兩個(gè)后輪的驅(qū)動(dòng)力,并進(jìn)行了多個(gè)工況的實(shí)車(chē)試驗(yàn)。
本文選取了能體現(xiàn)基本驅(qū)動(dòng)力分配策略效果的左轉(zhuǎn)以及右轉(zhuǎn)2個(gè)典型試驗(yàn)樣本,用以與建立的分布式后驅(qū)電動(dòng)客車(chē)模型的仿真結(jié)果進(jìn)行對(duì)比分析。
左轉(zhuǎn)工況初始車(chē)速47.7 km/h,持續(xù)時(shí)間10 s;右轉(zhuǎn)工況初始車(chē)速為0 km/h,持續(xù)時(shí)間10 s。仿真的輸入為方向盤(pán)轉(zhuǎn)角以及由加速踏板開(kāi)度決定的總需求轉(zhuǎn)矩這兩個(gè)實(shí)車(chē)試驗(yàn)數(shù)據(jù),仿真時(shí)車(chē)輛初速度設(shè)置與實(shí)車(chē)試驗(yàn)相應(yīng)工況對(duì)應(yīng)。對(duì)比分析左右后輪兩輪轂電機(jī)的輸出轉(zhuǎn)矩,如圖(4,5)所示。
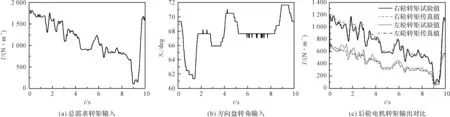
圖4 左轉(zhuǎn)工況仿真與實(shí)車(chē)試驗(yàn)對(duì)比分析

圖5 右轉(zhuǎn)工況仿真與實(shí)車(chē)試驗(yàn)對(duì)比分析
從圖4、圖5可知:在左轉(zhuǎn)、右轉(zhuǎn)兩種工況下,左右后輪兩個(gè)輪轂電機(jī)轉(zhuǎn)矩的試驗(yàn)輸出值和仿真輸出值基本相近,吻合度較高,驗(yàn)證了搭建的分布式后驅(qū)電動(dòng)客車(chē)模型的準(zhǔn)確性。第3章聯(lián)合仿真驗(yàn)證驅(qū)動(dòng)防滑控制時(shí)采用了該模型。
2 驅(qū)動(dòng)防滑控制模型設(shè)計(jì)
本文針對(duì)分布式后驅(qū)電動(dòng)客車(chē)的實(shí)際需求,結(jié)合分布式驅(qū)動(dòng)的特點(diǎn),設(shè)計(jì)了包括滑轉(zhuǎn)率計(jì)算模塊、單輪驅(qū)動(dòng)防滑、雙輪轉(zhuǎn)矩協(xié)調(diào)控制的驅(qū)動(dòng)防滑模型。雙輪轉(zhuǎn)矩協(xié)調(diào)控制在單輪獨(dú)立驅(qū)動(dòng)防滑后進(jìn)一步調(diào)整電機(jī)輸出轉(zhuǎn)矩,以調(diào)整車(chē)身姿態(tài),保證車(chē)輛的穩(wěn)定性,并將滑轉(zhuǎn)率控制在經(jīng)驗(yàn)值0.15左右,驅(qū)動(dòng)防滑模型的框架如圖6所示。

圖6 驅(qū)動(dòng)防滑模型框架
2.1 單輪驅(qū)動(dòng)防滑
以左后輪的驅(qū)動(dòng)防滑控制為例,左后輪滑轉(zhuǎn)率為:
(1)
式中:λl—左后輪滑轉(zhuǎn)率;vl—左后輪輪心速度;vwl—左后輪切向速度。
當(dāng)判斷出λl數(shù)值大于路面的最優(yōu)滑轉(zhuǎn)率λoptl時(shí),則以λoptl為控制目標(biāo),通過(guò)PI控制器調(diào)節(jié)電機(jī)輸出轉(zhuǎn)矩,從而將滑轉(zhuǎn)率控制在最優(yōu)滑轉(zhuǎn)率附近。PI控制器輸入為滑轉(zhuǎn)率偏差Δλl(Δλl=λoptl-λl),輸出為消除車(chē)輪打滑所需的電機(jī)轉(zhuǎn)矩調(diào)整量為:
(2)
式中:Kp1—比例系數(shù);Ki1—積分系數(shù)。
2.2 雙輪轉(zhuǎn)矩協(xié)調(diào)控制
橫擺角速度與質(zhì)心側(cè)偏角是兩個(gè)衡量車(chē)輛狀態(tài)的重要參考量。車(chē)輛當(dāng)前橫擺角速度可由傳感器直接測(cè)得,而目前尚無(wú)實(shí)時(shí)可靠的傳感器可測(cè)量質(zhì)心側(cè)偏角。因此,雙輪轉(zhuǎn)矩協(xié)調(diào)控制模塊僅將橫擺角速度作為控制量,設(shè)計(jì)了橫擺角速度PI控制器,使車(chē)輛的橫擺角速度γ盡可能控制在當(dāng)前工況下的理想橫擺角速度γ*附近。
根據(jù)車(chē)輛二自由度模型計(jì)算出理想橫擺角速度γ*:
(3)
式中:v—車(chē)輛當(dāng)前車(chē)速;δ—前輪平均轉(zhuǎn)向角;L—軸距;K—穩(wěn)定性因數(shù)[11],其表達(dá)式如下:
K=m(a/k2-b/k1)/L2.
(4)
式中:m—車(chē)輛質(zhì)量;a,b—前后軸到質(zhì)心的距離;k1,k2—前后輪的側(cè)偏剛度,經(jīng)計(jì)算K為0.005。
控制器同樣采用PI控制方法,輸入為橫擺角速度差Δγ(Δγ=γ*-γ),輸出為需要調(diào)節(jié)的電機(jī)轉(zhuǎn)矩如下:
(5)
式中:Kp2—比例系數(shù);Ki2—積分系數(shù)。
考慮到客車(chē)體積重量大,控制難,故僅在車(chē)速較小時(shí)采取以上轉(zhuǎn)矩協(xié)調(diào)方案。筆者設(shè)計(jì)臨界車(chē)速30 km/h,當(dāng)車(chē)速大于該值時(shí),在實(shí)施單輪驅(qū)動(dòng)防滑后,以小轉(zhuǎn)矩輸出電機(jī)為基準(zhǔn),減小大轉(zhuǎn)矩電機(jī)的輸出轉(zhuǎn)矩,使兩電機(jī)輸出同等轉(zhuǎn)矩,最大限度保證車(chē)輛穩(wěn)定性。
3 聯(lián)合仿真驗(yàn)證
本研究在已經(jīng)被實(shí)車(chē)試驗(yàn)驗(yàn)證過(guò)的分布式后驅(qū)電
動(dòng)客車(chē)驅(qū)動(dòng)力控制聯(lián)合仿真系統(tǒng)(圖3)中加入設(shè)計(jì)的驅(qū)動(dòng)防滑模型,形成包含驅(qū)動(dòng)防滑功能的分布式驅(qū)動(dòng)控制聯(lián)合仿真系統(tǒng)如圖7所示。
分布式后驅(qū)電動(dòng)客車(chē)初始車(chē)速設(shè)為5 km/h,左右后輪電機(jī)的初始轉(zhuǎn)矩為5 000 Nm,方向盤(pán)轉(zhuǎn)角輸入保持為0,通過(guò)對(duì)接路面及對(duì)開(kāi)路面兩種仿真工況,驗(yàn)證設(shè)計(jì)的用于分布式后驅(qū)電動(dòng)客車(chē)的驅(qū)動(dòng)防滑控制策略的有效性。
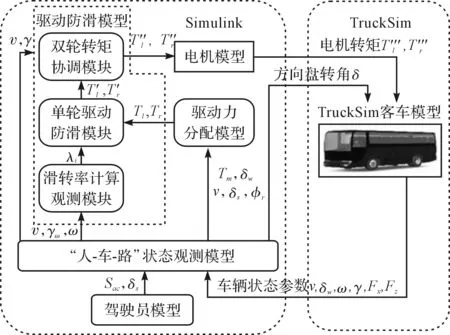
圖7 驅(qū)動(dòng)防滑控制聯(lián)合仿真系統(tǒng)
3.1 對(duì)接路面工況仿真
對(duì)接路面前20 m的附著系數(shù)為較高的0.5,20 m~60 m之間的附著系數(shù)為較低的0.1,60 m以后的路面附著系數(shù)重新變?yōu)?.5,仿真結(jié)果如圖8所示。
由圖8(a,b)左右側(cè)電機(jī)的輸出轉(zhuǎn)矩可知,車(chē)輛在行駛5 s之后進(jìn)入附著系數(shù)0.1的低附著路面,此時(shí)帶驅(qū)動(dòng)防滑控制的左右后輪電機(jī)輸出轉(zhuǎn)矩迅速降低到1 800 Nm左右,而不帶驅(qū)動(dòng)防滑控制的電機(jī)仍然保持為最初需求轉(zhuǎn)矩5 000 Nm,導(dǎo)致無(wú)驅(qū)動(dòng)防滑控制的左右兩個(gè)驅(qū)動(dòng)輪滑轉(zhuǎn)率迅速上升到0.8以上,而帶驅(qū)動(dòng)防滑控制的左右兩個(gè)驅(qū)動(dòng)輪滑轉(zhuǎn)率仍然保持在較低的數(shù)值(小于0.1),也與該路面條件下的最佳滑轉(zhuǎn)率接近,符合實(shí)際,如圖8(c,d)所示。從圖8(e~g)中可以看到,無(wú)防滑控制的車(chē)輛在進(jìn)入低附著路面后橫擺角速度以及質(zhì)心側(cè)偏角迅速增加,10 s之后絕對(duì)值分別達(dá)到了11°/s和5.5°,車(chē)輛出現(xiàn)失穩(wěn)現(xiàn)象,而帶防滑控制的車(chē)輛運(yùn)行穩(wěn)定;在同樣帶有單輪驅(qū)動(dòng)防滑控制的情況下,有協(xié)調(diào)控制的車(chē)輛,縱向位移相比于無(wú)協(xié)調(diào)控制的車(chē)輛更小,穩(wěn)定性增強(qiáng)。
3.2 對(duì)開(kāi)路面工況仿真
車(chē)輛在附著系數(shù)為0.5的高附著路面行駛10 m后,進(jìn)入路面左側(cè)附著系數(shù)為0.5,路面右側(cè)附著系數(shù)為0.1的對(duì)開(kāi)路面,仿真結(jié)果如圖9所示。

圖8 對(duì)接路面仿真結(jié)果
由圖9(a,b)左右后輪電機(jī)的輸出轉(zhuǎn)矩以及圖9(c,d)左右后輪滑轉(zhuǎn)率可知,車(chē)輛在行駛大約4 s之后進(jìn)入對(duì)開(kāi)路面,此時(shí)右側(cè)車(chē)輪進(jìn)入低附著路面,帶驅(qū)動(dòng)防滑控制的右后輪電機(jī)輸出轉(zhuǎn)矩迅速降低到1 800 Nm左右,而不帶驅(qū)動(dòng)防滑控制的右后輪電機(jī)仍然保持為最初需求轉(zhuǎn)矩5 000 Nm;帶驅(qū)動(dòng)防滑控制的左右兩后輪的滑轉(zhuǎn)率仍然保持在較低值(0.1以下),與該路面條件下的最佳滑轉(zhuǎn)率接近,符合實(shí)際而無(wú)驅(qū)動(dòng)防滑控制的右后輪滑轉(zhuǎn)率迅速上升到0.8以上;帶有協(xié)調(diào)控制的左后輪電機(jī)輸出轉(zhuǎn)矩,在右后輪電機(jī)輸出轉(zhuǎn)矩迅速減小后也相應(yīng)地減小;當(dāng)行駛約8.5 s之后,無(wú)協(xié)調(diào)控制的車(chē)輛由于輕微跑偏,左右兩輪都進(jìn)入低附著路面,左后輪電機(jī)的輸出轉(zhuǎn)矩也被控制到右后輪電機(jī)的相同水平。從圖9(e~g)中可以看到,無(wú)防滑控制的車(chē)輛在進(jìn)入對(duì)開(kāi)路面后橫擺角速度以及質(zhì)心側(cè)偏角迅速增加,10 s之后絕對(duì)值分別達(dá)到了11°/s和6.3°,車(chē)輛出現(xiàn)失穩(wěn)現(xiàn)象;有單輪驅(qū)動(dòng)防滑但無(wú)協(xié)調(diào)控制的車(chē)輛的橫擺角速度以及質(zhì)心側(cè)偏角絕對(duì)值在10 s后也分別達(dá)到了3.5°/s以及2°,與不帶驅(qū)動(dòng)防滑的車(chē)輛相同出現(xiàn)較大側(cè)向位移,車(chē)輛開(kāi)始失穩(wěn);而單輪驅(qū)動(dòng)防滑及協(xié)調(diào)控制的車(chē)輛側(cè)向位移較小,行駛穩(wěn)定。
以上仿真結(jié)果表明,在低附著系數(shù)的對(duì)接路面和對(duì)開(kāi)路面上,所設(shè)計(jì)的單輪驅(qū)動(dòng)防滑模塊能迅速發(fā)揮作用,減小打滑輪側(cè)電機(jī)的輸出轉(zhuǎn)矩,使車(chē)輪滑轉(zhuǎn)率保持在較低的水平;在對(duì)接路面上,由于左、右后輪同時(shí)進(jìn)入附著系數(shù)相同的低附著路面,兩電機(jī)的輸出轉(zhuǎn)矩保持同步減小,車(chē)輛未產(chǎn)生明顯的非期望橫擺力矩,轉(zhuǎn)矩協(xié)調(diào)控制模塊僅起到微弱調(diào)整作用;而在對(duì)開(kāi)路面上,實(shí)施單輪驅(qū)動(dòng)防滑后產(chǎn)生較大的非期望橫擺力矩,協(xié)調(diào)控制模塊作用明顯,使車(chē)輛能夠穩(wěn)定行駛。
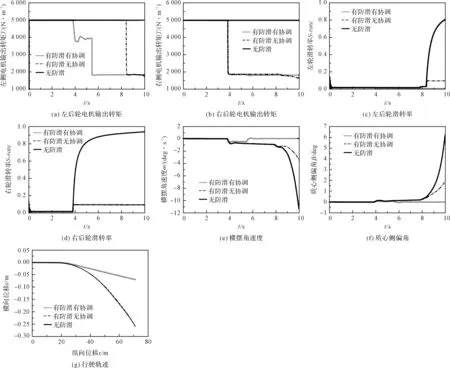
圖9 對(duì)開(kāi)路面仿真結(jié)果
4 結(jié)束語(yǔ)
針對(duì)采用兩個(gè)輪轂電機(jī)的分布式后驅(qū)電動(dòng)客車(chē),本文基于實(shí)車(chē)參數(shù)在Trucksim搭建了客車(chē)模型,并對(duì)搭載了基本驅(qū)動(dòng)力分配算法的客車(chē)進(jìn)行了場(chǎng)地試驗(yàn),選取了左轉(zhuǎn)以及右轉(zhuǎn)兩個(gè)能體現(xiàn)基本驅(qū)動(dòng)力分配算法效果的工況的試驗(yàn)數(shù)據(jù),與仿真數(shù)據(jù)進(jìn)行對(duì)比,驗(yàn)證了客車(chē)模型的準(zhǔn)確性。
本文設(shè)計(jì)了包括滑轉(zhuǎn)率估算、基于PI控制的單輪驅(qū)動(dòng)防滑、雙輪轉(zhuǎn)矩協(xié)調(diào)的驅(qū)動(dòng)防滑系統(tǒng),將驗(yàn)證過(guò)的客車(chē)模型用于Trucksim與Matlab/Simulink聯(lián)合仿真平臺(tái),進(jìn)行低附著系數(shù)對(duì)開(kāi)路面及對(duì)接路面多工況聯(lián)合仿真測(cè)試,對(duì)各電機(jī)輸出扭矩、各車(chē)輪滑轉(zhuǎn)率、橫擺角速度、質(zhì)心側(cè)偏角、車(chē)輛側(cè)向位移等多個(gè)仿真參數(shù)進(jìn)行分析,結(jié)果表明,所設(shè)計(jì)的驅(qū)動(dòng)防滑控制模型能有效地抑制了車(chē)輪打滑現(xiàn)象。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19