換流站閥廳內(nèi)壁清潔機(jī)器人的設(shè)計(jì)*
2018-08-03 04:19:50焦義康劉志遠(yuǎn)鄒洪森趙欣洋
機(jī)電工程 2018年7期
焦義康,劉志遠(yuǎn),潘 燁,鄒洪森,趙欣洋
(1.浙江工業(yè)大學(xué) 特種裝備制造與先進(jìn)加工技術(shù)教育部/浙江省重點(diǎn)實(shí)驗(yàn)室,浙江 杭州 310014;2.國(guó)家電網(wǎng)寧夏檢修公司,寧夏 銀川 750000)
0 引 言
換流站是在高壓直流輸電系統(tǒng)中,為了完成將交流電變換為直流電或者將直流電變換為交流電的轉(zhuǎn)換,并達(dá)到電力系統(tǒng)對(duì)于安全穩(wěn)定及電能質(zhì)量的要求而建立的站點(diǎn)。換流閥作為換流站直流輸電工程的核心設(shè)備,通過依次將三相交流電壓連接到直流端得到期望的直流電壓和實(shí)現(xiàn)對(duì)功率的控制。閥廳是放置換流閥的封閉建筑,換流站及直流輸電系統(tǒng)的運(yùn)行性能和安全可靠程度與閥廳內(nèi)電力設(shè)備的安全運(yùn)行度密切相關(guān),對(duì)整個(gè)電力系統(tǒng)的運(yùn)行也有重要的影響。閥廳雖然是封閉建筑,但是長(zhǎng)年累月的累積依然會(huì)導(dǎo)致閥廳內(nèi)壁積灰,對(duì)換流閥的安全性和使用壽命造成很大的影響,因此要保持閥廳壁面的清潔。
經(jīng)過現(xiàn)場(chǎng)考察,換流站閥廳壁面為特殊的鋼結(jié)構(gòu),壁面總高30 m,壁面橫向每隔150 mm會(huì)有一個(gè)高24 mm的梯形加強(qiáng)筋,并且壁面上存在規(guī)則排列的高10 mm的螺釘,同時(shí)壁面上方約0.4 m處有橫梁懸空。目前全部由人工清潔,但人工清潔危險(xiǎn)性高,且需要換流站停電,損失巨大。為此,需要開發(fā)一款爬壁機(jī)器人。為了不影響閥廳的正常工作,閥廳頂部與壁面不能搭建用于吊裝機(jī)器人攀爬的纜索或其它設(shè)備。
早在1966年,日本就研制出基于負(fù)壓吸附的爬壁機(jī)器人樣機(jī)[1]。我國(guó)的壁面移動(dòng)機(jī)器人研究起步較晚,哈爾濱工業(yè)大學(xué)、北京航空航天大學(xué)、上海交通大學(xué)在壁面移動(dòng)機(jī)器人這一領(lǐng)域處于國(guó)內(nèi)領(lǐng)先地位。現(xiàn)有的壁面清潔機(jī)器人主要分為3類:磁吸附清潔機(jī)器人[2-5]、負(fù)壓吸附清潔機(jī)器人[6-9]、仿生清潔機(jī)器人[10-13]。負(fù)壓吸附清潔機(jī)器人由于采用了負(fù)壓吸附方式使它無(wú)法在換流站閥廳這種特殊結(jié)構(gòu)的壁面上產(chǎn)生穩(wěn)定的吸附力,導(dǎo)致機(jī)器人不能正常工作;而市面上的磁吸附清潔機(jī)器人由于設(shè)計(jì)時(shí)未考慮到換流站閥廳的環(huán)境以及壁面的特殊結(jié)構(gòu)因此也無(wú)法在此壁面上穩(wěn)定工作;仿生吸附一般在外形、吸附原理和運(yùn)動(dòng)形式上都參照壁虎或尺蠖設(shè)計(jì),可微型化,但承載能力弱,不能滿足搭載清潔裝置的要求,同樣不適用于換流站閥廳的清潔。
因此,本文將研制一款專用于換流站閥廳內(nèi)壁的清潔機(jī)器人。
1 行進(jìn)吸附和驅(qū)動(dòng)方式
1.1 行進(jìn)方案
履帶式運(yùn)動(dòng)可靠穩(wěn)定,承載能力和越障能力強(qiáng),故采用履帶式運(yùn)動(dòng)方式[14]。由于換流站閥廳壁面有凸起的螺釘,為了提高機(jī)器人的越障能力,本文采用了雙節(jié)履帶式行進(jìn)機(jī)構(gòu)。雙節(jié)履帶機(jī)器人在越障過程中的效果如圖1所示。
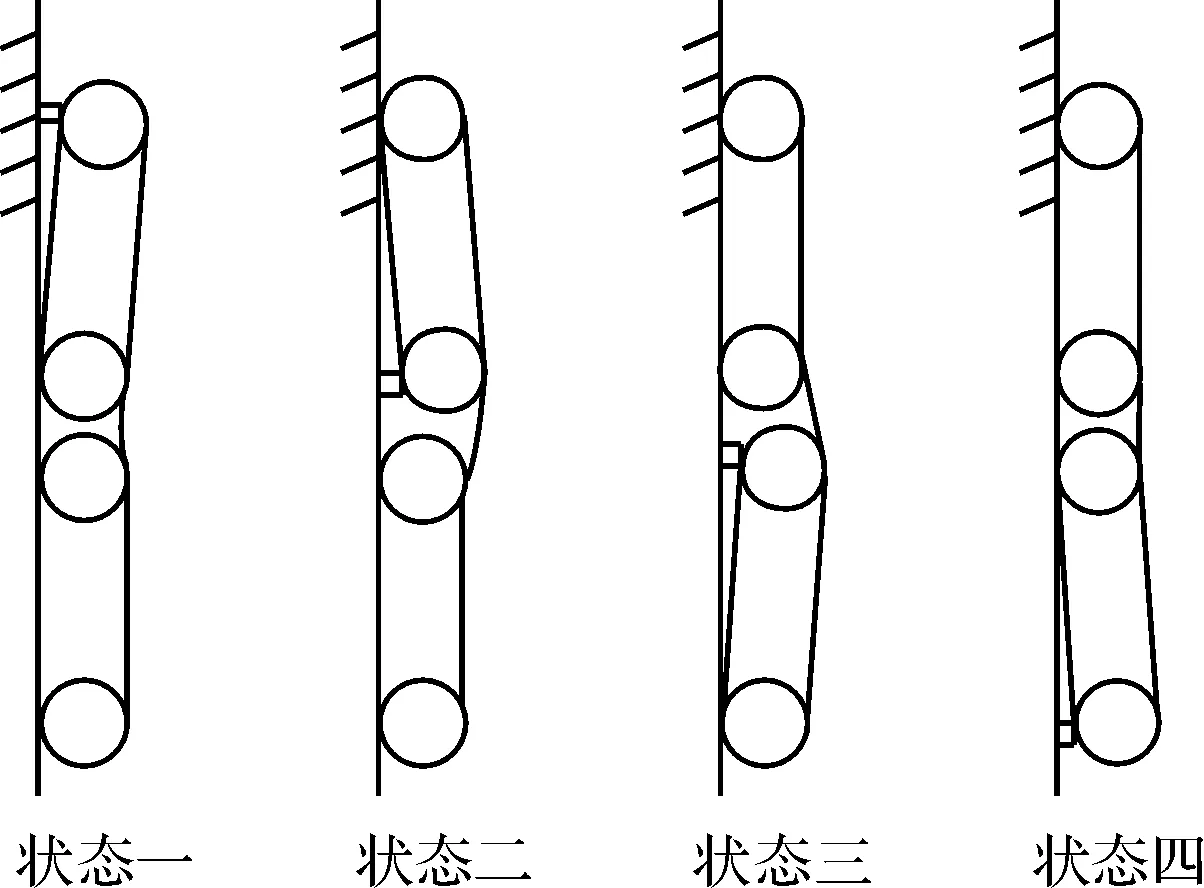
圖1 雙節(jié)履帶機(jī)構(gòu)越障示意圖
行進(jìn)機(jī)構(gòu)分為前履帶和后履帶兩部分,前后機(jī)身通過3條彈簧鋼連接,以增加機(jī)器人柔性。雙節(jié)履帶的方案使得機(jī)器人單節(jié)履帶在越障時(shí)由于彈簧鋼的彈性變形使得另一節(jié)履帶完全吸附于壁面,提高了機(jī)器人越障能力。
其中履帶是由鏈輪鏈條及永磁體組成,由于鏈速及傳遞的功率比較小,本研究選用了型號(hào)為08B國(guó)標(biāo)GB/T1243-2006的普通短節(jié)距滾子鏈,其節(jié)距p=12.7 mm。考慮到機(jī)器人尺寸以及鏈條均勻磨損,為此傳動(dòng)比i取1,鏈輪齒數(shù)為z1=z2=19。鏈輪實(shí)際中心距為349.4 mm。機(jī)器人攀爬過程中單個(gè)鏈條始終穩(wěn)定吸附的永磁體數(shù)量為7塊。
1.2 吸附方式
換流站閥廳內(nèi)壁為鋼結(jié)構(gòu),屬于導(dǎo)磁性材料,采用磁吸附方案。由于電磁吸附結(jié)構(gòu)復(fù)雜,單位體積產(chǎn)生的吸附力小,且電磁吸附存在斷電安全隱患,選用永磁吸附。
1.3 永磁吸附單元永磁體與磁路設(shè)計(jì)
為了制造及安裝的方便,永磁吸附單元被設(shè)計(jì)為矩形,其結(jié)構(gòu)尺寸(長(zhǎng)×寬×高)為:36 mm×12 mm×4 mm。永磁吸附單元和磁路如圖2所示。

圖2 永磁吸附單元
永磁體通過螺釘固定在鏈條的彎板上。為了在相同質(zhì)量下盡可能地增大磁吸附力,本研究將相鄰永磁體采用圖中方向進(jìn)行充磁和排列,使得相鄰兩個(gè)永磁體形成的閉合磁力線盡可能多地穿過壁面,并且相鄰永磁體“兩兩相吸”的方式使永磁體形成“環(huán)環(huán)相扣”的整體,吸附得更加牢固。
1.4 驅(qū)動(dòng)方式
電機(jī)驅(qū)動(dòng)是應(yīng)用最廣泛的一種驅(qū)動(dòng)方式,體積小、重量輕、響應(yīng)速度快、精度高[15]。基于機(jī)器人的工作環(huán)境等要求,筆者選擇電機(jī)驅(qū)動(dòng)方式,同時(shí)根據(jù)電機(jī)應(yīng)用要求,選用帶剎車的步進(jìn)電機(jī)。
選定電機(jī)類型后,需要對(duì)電機(jī)位置進(jìn)行布置,由于機(jī)器人采用了雙節(jié)履帶式行進(jìn)機(jī)構(gòu),電機(jī)位置主要有4種布置形式,如圖3所示。

圖3 4種驅(qū)動(dòng)位置示意圖
因?yàn)榍鍧崣C(jī)器人是豎直向上攀爬,重心越低發(fā)生傾覆的概率越小,穩(wěn)定性越強(qiáng)。但在機(jī)器人越障時(shí),若采用后履帶后驅(qū)有可能使機(jī)器人后履帶出現(xiàn)脫離壁面而發(fā)生打滑無(wú)法行進(jìn)的現(xiàn)象,因此本研究選擇后履帶前驅(qū)并通過鏈傳動(dòng)將動(dòng)力傳遞到前履帶輪的驅(qū)動(dòng)形式。
2 清掃機(jī)構(gòu)
由于換流站閥廳對(duì)室內(nèi)環(huán)境有一定的要求,內(nèi)壁不允許用液體沖洗壁面,并且壁面存在加強(qiáng)筋和螺釘?shù)韧蛊穑膊灰瞬捎貌恋姆绞剑狙芯坎捎昧藵L刷加吸塵的組合清掃方式,如圖4所示。
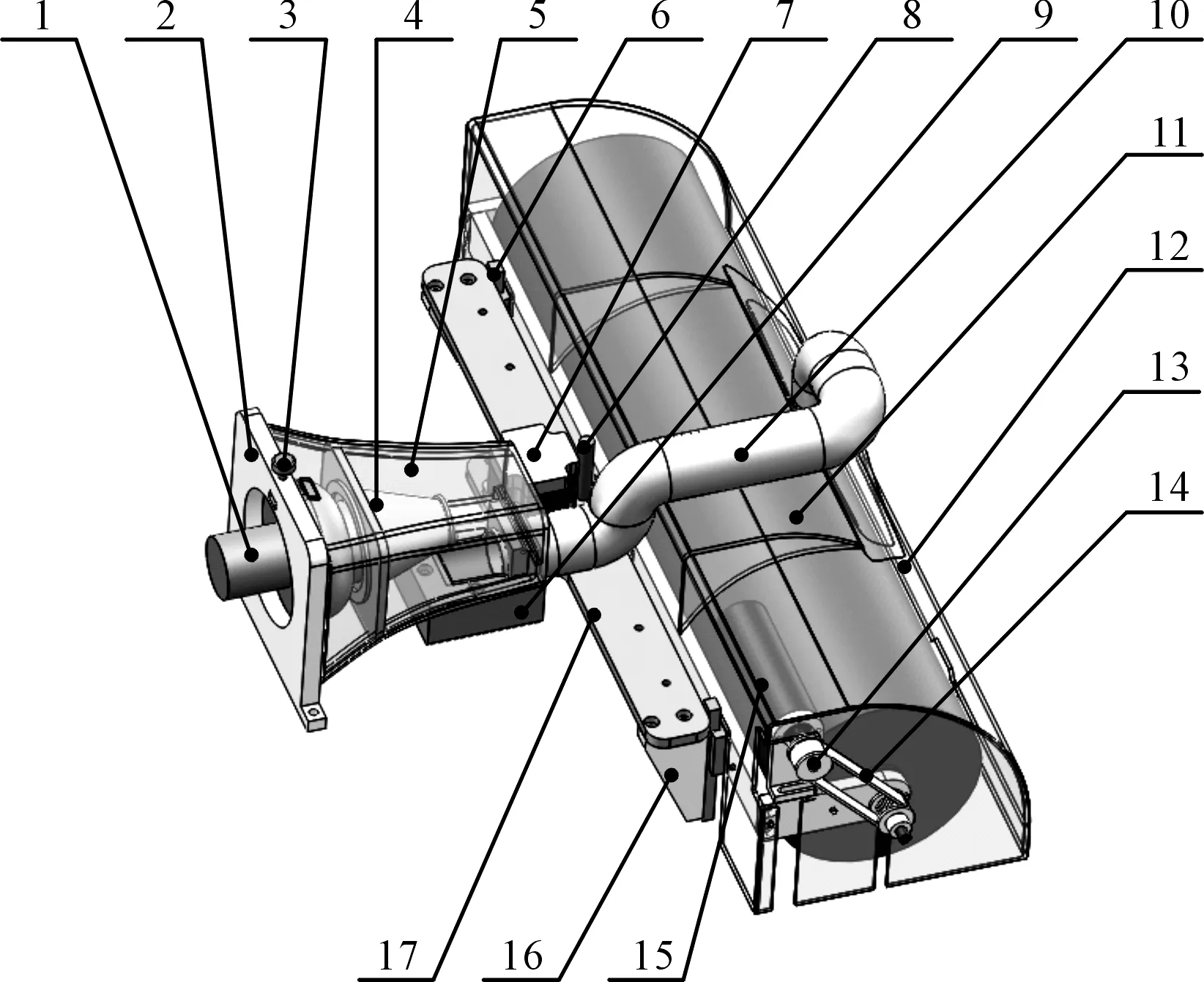
圖4 清掃機(jī)構(gòu)1—吸塵電機(jī);2—支撐板;3—按鈕;4—過濾網(wǎng);5—集塵罩;6—導(dǎo)軌;7—絲杠電機(jī);8—接近開關(guān);9—吸塵支座;10—?dú)夤埽?1—滾刷;12—遮塵罩;13—帶輪;14—同步帶;15—直流電機(jī);16—導(dǎo)軌支撐板;17—安裝板
清掃機(jī)構(gòu)主要包括升降、吸塵和清掃3大功能模塊。本文采用模塊化的思路[16],將升降模塊和清掃模塊通過一塊安裝板與機(jī)器人機(jī)身相連接,便于一同安裝與拆卸,提高了工作效率。在吸塵模塊中,集塵罩可通過上方的按扭方便拆卸,便于重復(fù)利用。另外,吸塵器殼和遮塵罩為3D打印制造,氣管為EVA材質(zhì)軟管;滾刷的形狀則是根據(jù)彩鋼板截面形狀而定制的。
機(jī)器人清掃作業(yè)時(shí),直流電機(jī)帶動(dòng)滾刷轉(zhuǎn)動(dòng),將壁面上的灰塵揚(yáng)起,并擋在遮塵罩內(nèi)。然后吸塵電機(jī)將揚(yáng)起的灰塵通過氣管吸入集塵罩內(nèi)以達(dá)到除塵的效果;當(dāng)機(jī)器人無(wú)需工作時(shí),絲杠電機(jī)帶動(dòng)清掃模塊沿導(dǎo)軌向上移動(dòng),使清掃刷脫離壁面,當(dāng)上升到一定高度時(shí),接近開關(guān)檢測(cè)到信號(hào),絲杠電機(jī)斷電,清掃裝置即停止運(yùn)動(dòng)。
3 機(jī)器人結(jié)構(gòu)確定
換流站閥廳壁面清潔機(jī)器人采用永磁吸附方式與雙節(jié)履帶式行進(jìn)機(jī)構(gòu),可以穩(wěn)定吸附于壁面并安全的翻越螺釘;并采用帶剎車的步進(jìn)電機(jī)為驅(qū)動(dòng)以防止機(jī)器人斷電滾落;以及專用于換流站閥廳壁面的清掃機(jī)構(gòu)。機(jī)器人整機(jī)尺寸(長(zhǎng)×寬×高)為:271 mm×507 mm×245 mm,結(jié)構(gòu)如圖5所示。

圖5 整機(jī)結(jié)構(gòu)圖1—后機(jī)架;2—電路板;3—驅(qū)動(dòng)器;4—彈簧鋼;5—履帶;6—前機(jī)架;7—電池;8—升降電機(jī);9—接近開關(guān);10—導(dǎo)軌;11—滾刷;12—遮塵罩;13—?dú)夤埽?4—直流電機(jī);15—連接板;16—紅外傳感器;17—過濾網(wǎng);18—按鈕;19—吸塵電機(jī);20—傳動(dòng)鏈;21—張緊器;22—步進(jìn)電機(jī)
機(jī)器人工作時(shí)始終有28塊永磁體吸附于壁面,并且由于兩個(gè)步進(jìn)電機(jī)驅(qū)動(dòng),因此可以實(shí)現(xiàn)小幅度轉(zhuǎn)向和前進(jìn)后退。另外,由于壁面加強(qiáng)筋的存在,布置在機(jī)器人前后左右的4個(gè)紅外傳感器可以通過測(cè)量與壁面的距離實(shí)時(shí)檢測(cè)機(jī)器人的位置,當(dāng)機(jī)器人沿豎直方向發(fā)生一定角度的偏轉(zhuǎn)時(shí),距離變化使傳感器發(fā)送信號(hào)到步進(jìn)電機(jī),通過差速調(diào)節(jié)機(jī)器人轉(zhuǎn)向。驅(qū)動(dòng)電機(jī)均安裝于后履帶,以使重心后移以增強(qiáng)抗傾覆性能。該壁面清潔機(jī)器人專用于換流站閥廳壁面的清潔工作。
4 驅(qū)動(dòng)力計(jì)算
驅(qū)動(dòng)模塊的設(shè)計(jì)主要在于電機(jī)轉(zhuǎn)矩的計(jì)算和選型。機(jī)器人總質(zhì)量m約為25 kg(含電池質(zhì)量),現(xiàn)對(duì)機(jī)器人所需驅(qū)動(dòng)扭矩進(jìn)行計(jì)算。
清潔機(jī)器人攀爬過程中,永磁體是“一吸一離”的向上移動(dòng),因此受到的阻力主要包括:機(jī)器人自身重量G、揭起單個(gè)永磁體的阻力矩M和加速時(shí)所克服阻力F1。其中為了防止永磁體損傷壁面,對(duì)永磁體外表面加了一片薄橡膠,查機(jī)械設(shè)計(jì)手冊(cè)知:鋼鐵與橡膠的靜摩擦系數(shù)為0.7。
其中,機(jī)器人自身重量G為:
G=m·g
(1)
加速時(shí)所克服阻力F1為:
F1=m·a
(2)
式中:m—機(jī)器人自身質(zhì)量;a—機(jī)器人行進(jìn)加速度。
故機(jī)器人在行進(jìn)過程中受到的總的阻力F2為:
F2=G+F1
(3)
機(jī)器人穩(wěn)定攀爬時(shí)速度約為2.2 m/min,設(shè)定機(jī)器人由靜止到穩(wěn)定運(yùn)行的時(shí)間為1 s,那么可以得到加速度a=0.04 m/s2。將m,a的值代入(1~3)中得到機(jī)器人總的阻力F2=246 N。
另外,已知機(jī)器人平穩(wěn)行進(jìn)時(shí)始終吸附于壁面的永磁體數(shù)量n=28,則單個(gè)永磁體磁力F3應(yīng)滿足:
(4)
相應(yīng)地:
(5)
式中:d—壁面到驅(qū)動(dòng)輪中心距離;N—完全吸附于壁面上的永磁體數(shù)量。
驅(qū)動(dòng)扭矩T的計(jì)算公式為:
(6)
式中:N—驅(qū)動(dòng)電機(jī)數(shù)量;η—傳動(dòng)機(jī)構(gòu)效率;i—傳動(dòng)機(jī)構(gòu)傳動(dòng)比。
將d=0.09 m,η′=0.8,i=10及式(5)代入式(6),得到驅(qū)動(dòng)扭矩T≥2.93 N·m。
根據(jù)上述計(jì)算結(jié)果,并考慮到安全系數(shù),最終筆者選取一對(duì)型號(hào)為5704HS42D8的步進(jìn)電機(jī)、DM5045型號(hào)的電機(jī)驅(qū)動(dòng)器和減速比為1∶10的行星齒輪減速器。其技術(shù)參數(shù)如表(1,2)所示。

表1 步進(jìn)電機(jī)技術(shù)參數(shù)

表2 行星齒輪減速器技術(shù)參數(shù)
5 樣機(jī)實(shí)驗(yàn)及結(jié)果
首先本研究對(duì)機(jī)器人做攀爬速度測(cè)試,通過秒表全程計(jì)時(shí),計(jì)算出小車攀爬速度。
實(shí)驗(yàn)數(shù)據(jù)如表3所示。

表3 攀爬速度測(cè)試
由表3可知:機(jī)器人實(shí)際攀爬速度略低于設(shè)定速度,相差幅度在2%~5%之間。其原因在于履帶與壁面接觸面滑動(dòng)影響了攀爬的速度。
對(duì)機(jī)器人樣機(jī)做各項(xiàng)性能實(shí)驗(yàn)如圖6所示。

圖6 機(jī)器人樣機(jī)實(shí)驗(yàn)
經(jīng)過實(shí)驗(yàn)得到機(jī)器人性能參數(shù)如表4所示。

表4 性能測(cè)試
爬壁實(shí)驗(yàn)結(jié)果表明:機(jī)器人關(guān)鍵結(jié)構(gòu)和工藝設(shè)計(jì)合理,能穩(wěn)定并安全地在壁面上攀爬,并可以完成清潔壁面的任務(wù)。
6 結(jié)束語(yǔ)
針對(duì)換流站閥廳的特殊工況,本研究開發(fā)了一款集吸附攀爬、直線行駛、清潔和越障等功能于一體的專用壁面清潔機(jī)器人。主要工作如下:
(1)設(shè)計(jì)了雙節(jié)履帶式行進(jìn)機(jī)構(gòu),提高了機(jī)器人的越障能力;設(shè)計(jì)了永磁體以特定方向充磁和排列的永磁吸附方案,以使同等質(zhì)量下的永磁體產(chǎn)生較強(qiáng)的吸附力;選用了帶剎車的步進(jìn)電機(jī)驅(qū)動(dòng),有效防止突然斷電造成的機(jī)器人滾落,以及后履帶前驅(qū)在降低機(jī)器人重心與穩(wěn)定攀爬之間取得了良好的平衡;設(shè)計(jì)了專用于換流站閥廳壁面的滾刷加吸塵組合的清掃機(jī)構(gòu);
(2)筆者對(duì)機(jī)器人驅(qū)動(dòng)轉(zhuǎn)矩進(jìn)行了理論計(jì)算,并根據(jù)計(jì)算結(jié)果完成了步進(jìn)電機(jī)及減速器的選型,樣機(jī)實(shí)驗(yàn)驗(yàn)證了計(jì)算結(jié)果的可靠性;
(3)筆者完成了樣機(jī)的制作,并模擬真實(shí)工況對(duì)樣機(jī)進(jìn)行了攀爬速度測(cè)試。結(jié)果表明:由于存在輕微打滑,機(jī)器人速度相比設(shè)定速度減小了約2%~5%。